Módulo GPS Holybro DroneCAN M8N - Processador STM32G4 BMM150 Compass 3GNSS Suporte Protocolo DroneCAN
Módulo GPS Holybro DroneCAN M8N - Processador STM32G4 BMM150 Compass 3GNSS Suporte Protocolo DroneCAN
HolyBro
Não foi possível carregar a disponibilidade de recolha
Descrição
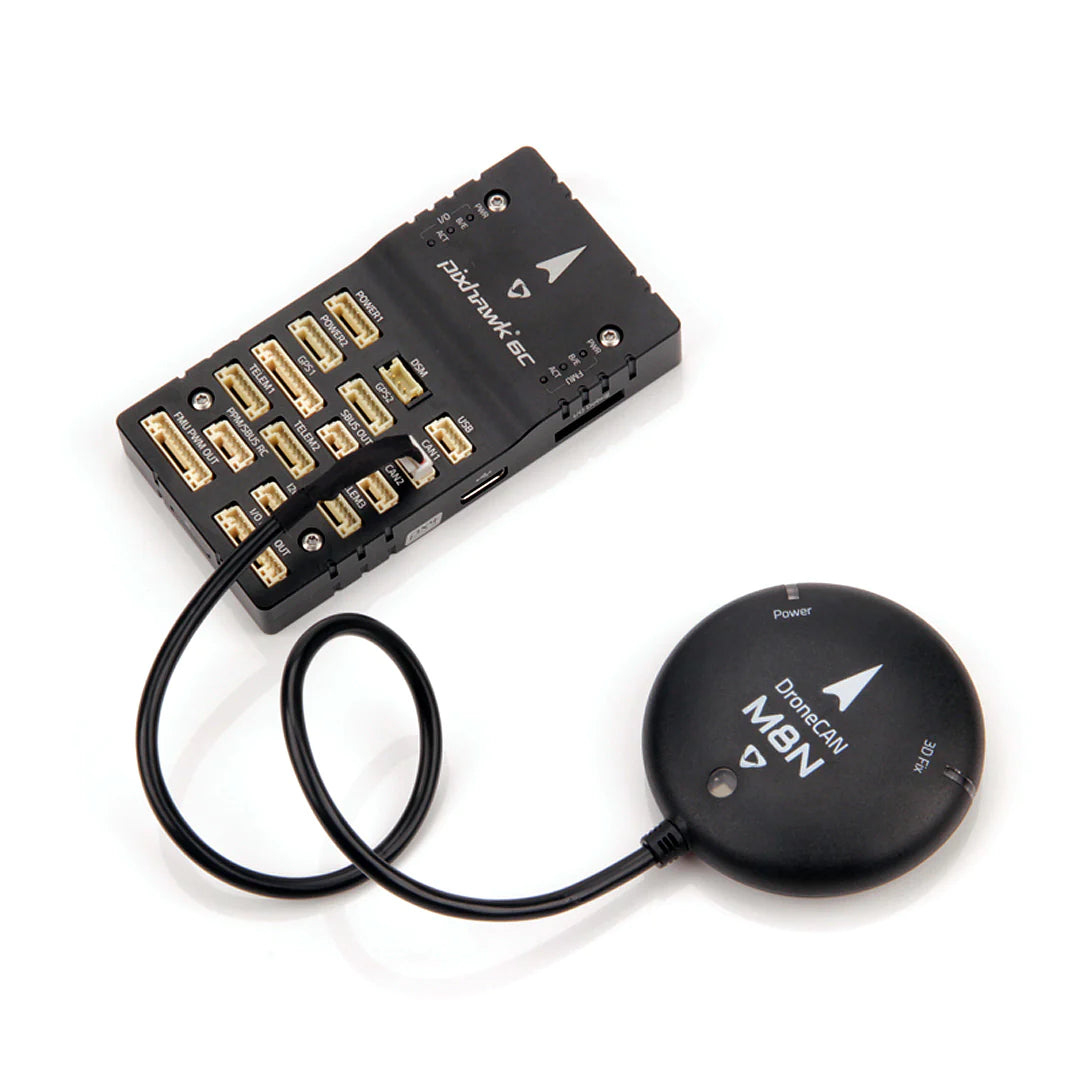
O Holybro DroneCAN GPS possui um módulo UBLOX M8N ou M9N, bússola BMM150, indicador LED tricolor. Possui Processador STM32G4 e adotou o protocolo DroneCAN para comunicação, tornando-o mais confiável e melhor no tratamento de interferências eletromagnéticas em comparação à conexão serial. Ele não ocupa nenhuma porta serial do controlador de vôo, e diferentes dispositivos CAN podem ser conectados ao mesmo barramento CAN através de uma placa divisora CAN.
Especificação:
| DroneCAN M8N | |
| Receptor GNSS | Ublox NEO M8N |
| Número de GNSS simultâneos | Até 3 GNSS (GPS, Galileo, GLONASS, BeiDou) |
| Processador | STM32G4 (170 MHz, 512K FLASH) |
| Bússola | BMM150 |
| Banda de frequência | GPS: L1C/A GLONASS: L10F Beidou: B1I Galileo: E1B/C |
| Sistema de aumento GNSS | SBAS: WAAS, EGNOS, MSAS, QZSS |
| Atualização de navegação | 5 Hz Padrão (10 Hz MÁX) |
| Precisão | 2,5 milhões |
| Precisão de velocidade | 0,05m/s |
| Número máximo de satélites | 22+ |
| Protocolo de comunicação | DroneCAN a 1 Mbit/s |
| Suporta piloto automático FW | PX4, Ardupilot |
| Tipo de porta | GHR-04V-S |
| Antena | Antena patch de cerâmica de 25 x 25 x 4 mm |
| Consumo de energia | Menos de 200mA @ 5V |
| Tensão | 4,7-5,2 V |
| Temperatura operacional | -40~80C |
| Tamanho | Diâmetro: 54mm Espessura: 14,5mm |
| Peso | 36g |
| Comprimento do cabo | 26cm |
| Outras notas | - Amplificador RF LNA MAX2659ELT+ - Capacitância Farah recarregável - Regulador de baixo ruído de 3,3V |
Para outras informações técnicas, acesse https://docs.holybro.com/
DroneCAN
DroneCAN é o principal protocolo CAN usado pelos projetos ArduPilot e PX4 para comunicação com periféricos CAN. É um protocolo aberto com comunicação aberta, especificação e múltiplas implementações abertas.
Desenvolvimento DroneCAN
O projeto DroneCAN tem uma comunidade de desenvolvimento ativa.
- discussões sobre discord em https://dronecan.org/discord
- desenvolvimento no github em https://github.com/DroneCAN
Related Collections