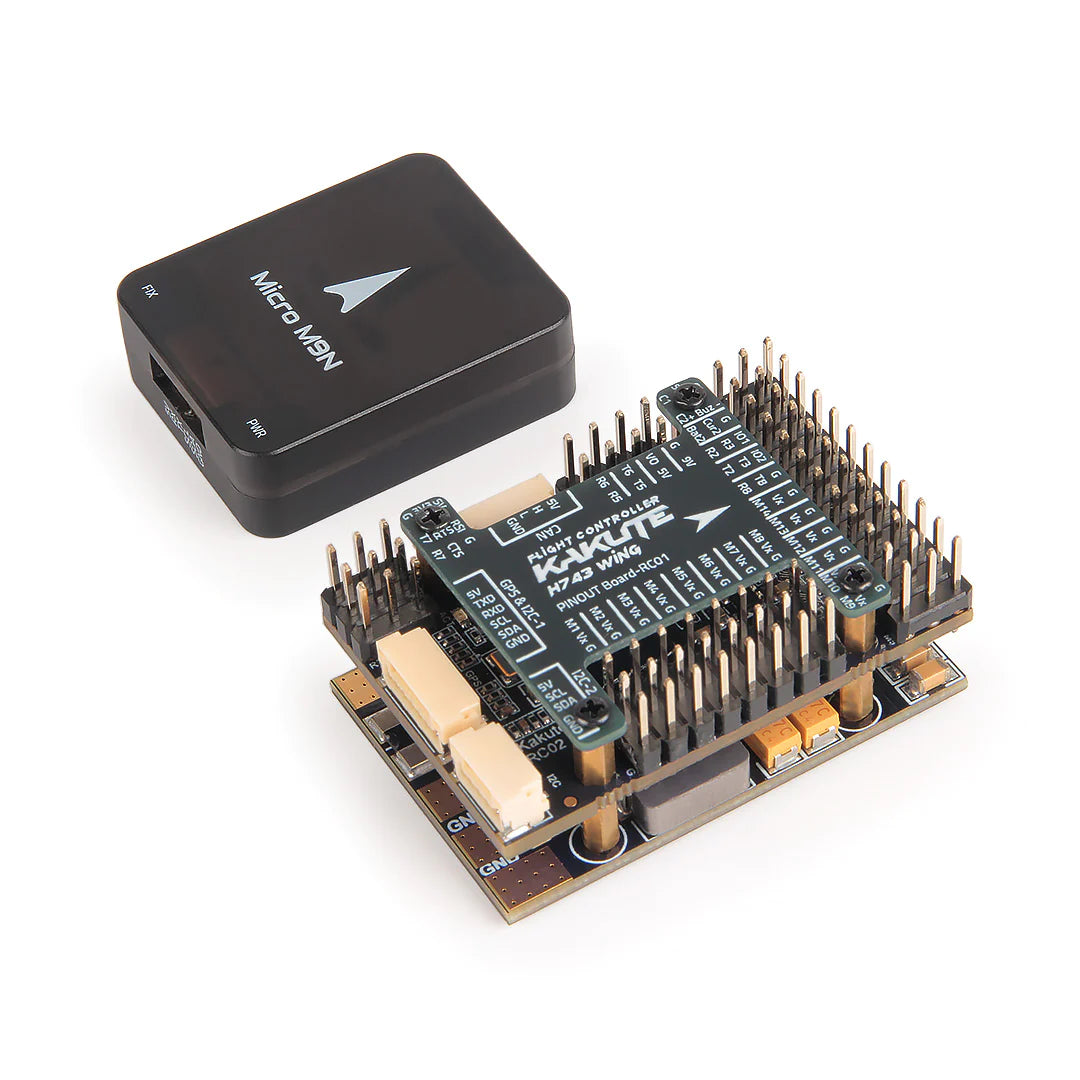
Controlador de voo de piloto automático Holybro Kakute H743-Wing - Layout específico para aplicações de asa fixa e VTOL com módulo GPS M9N M10
Controlador de voo de piloto automático Holybro Kakute H743-Wing - Layout específico para aplicações de asa fixa e VTOL com módulo GPS M9N M10
HolyBro
Preço normal
$125.00 USD
Preço normal
Preço de saldo
$125.00 USD
Preço unitário
por
Impostos incluídos.
Envio calculado na finalização da compra.
Não foi possível carregar a disponibilidade de recolha
Visão geral
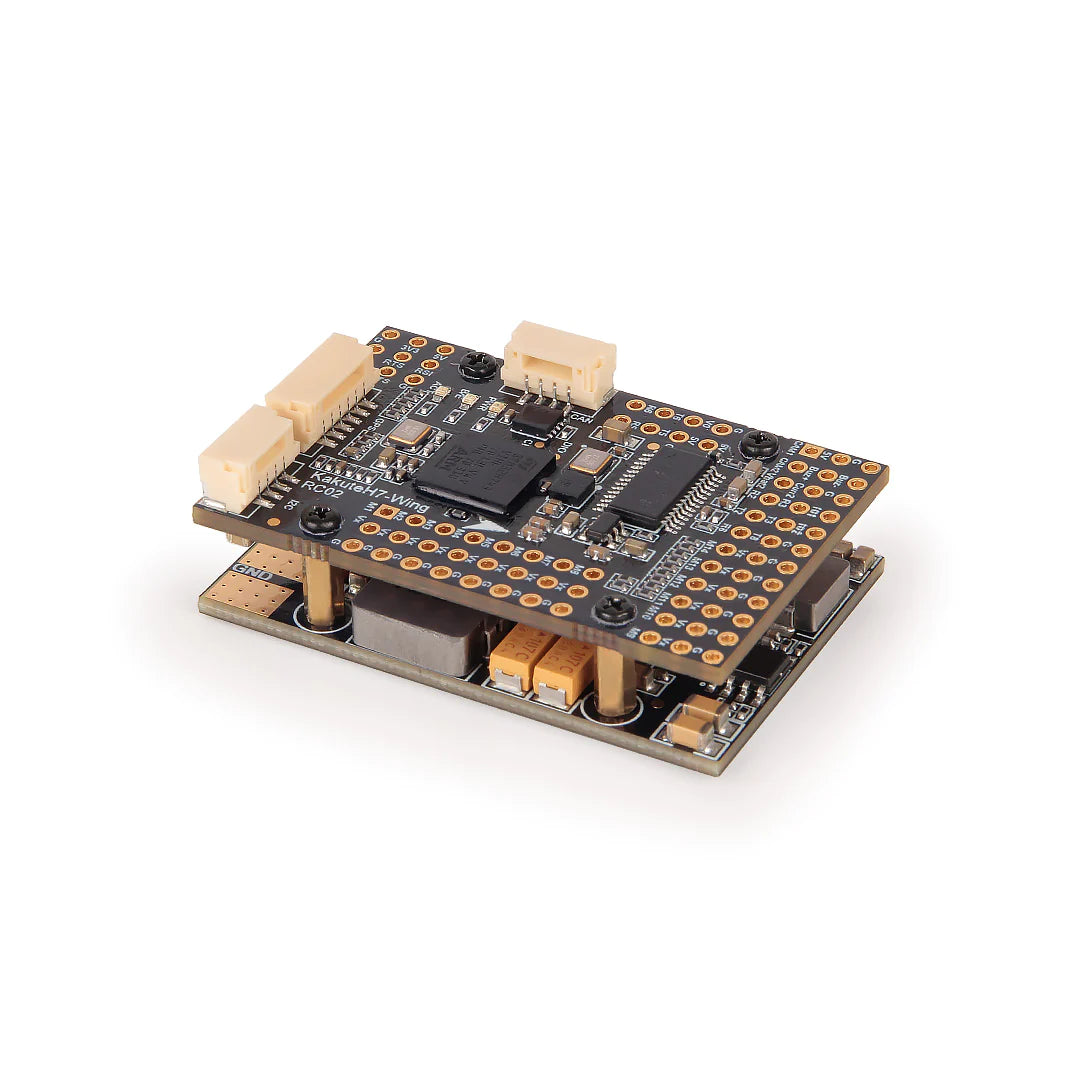
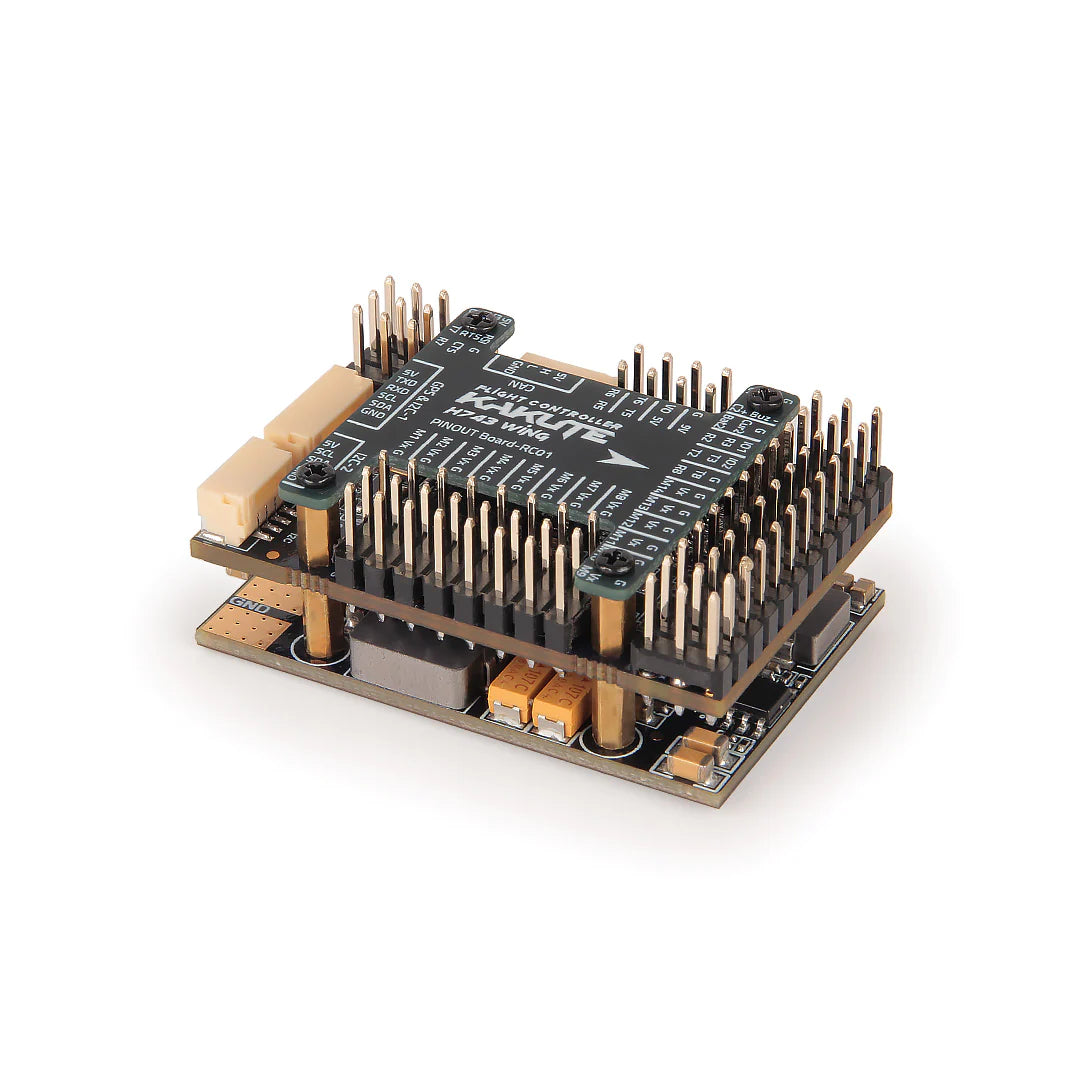
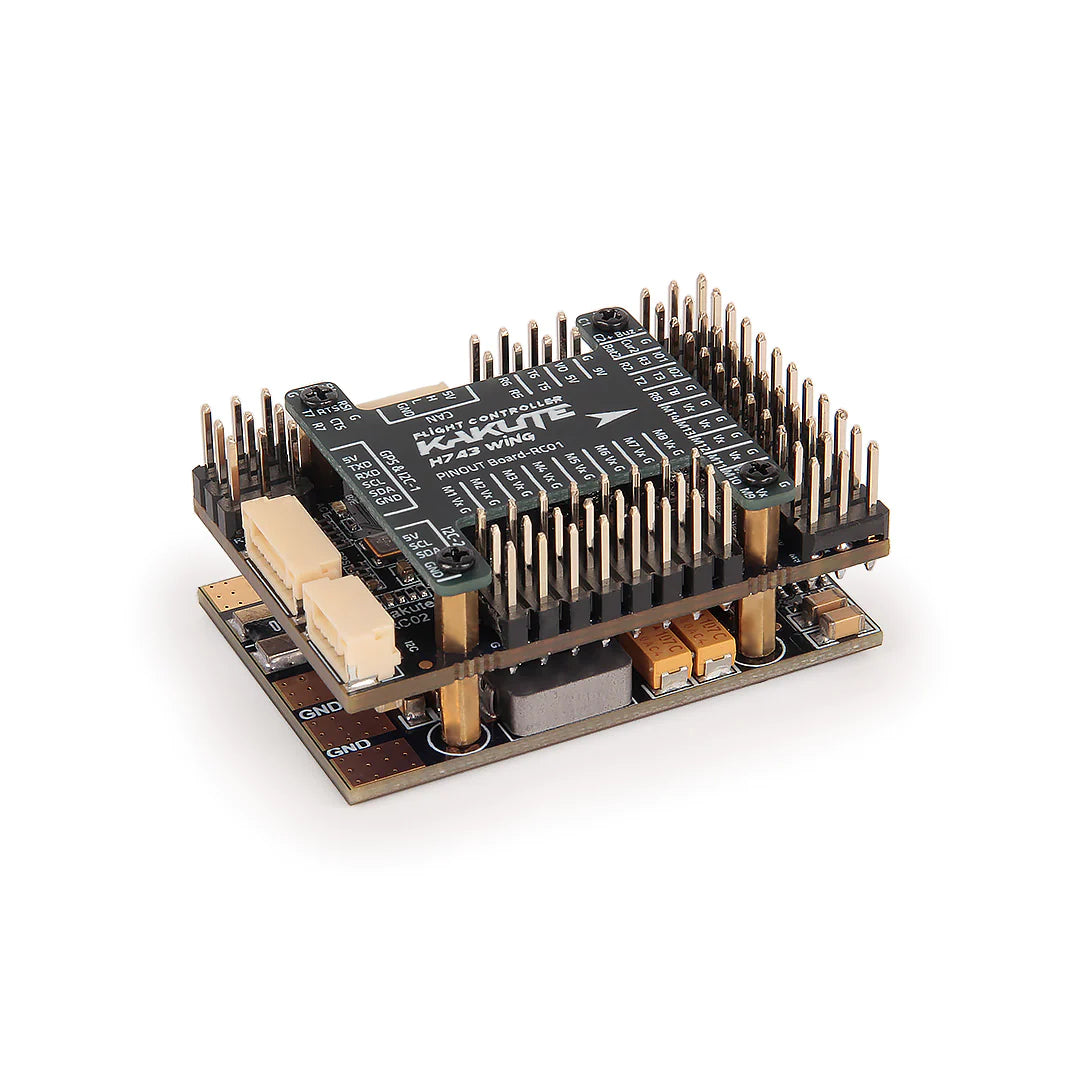
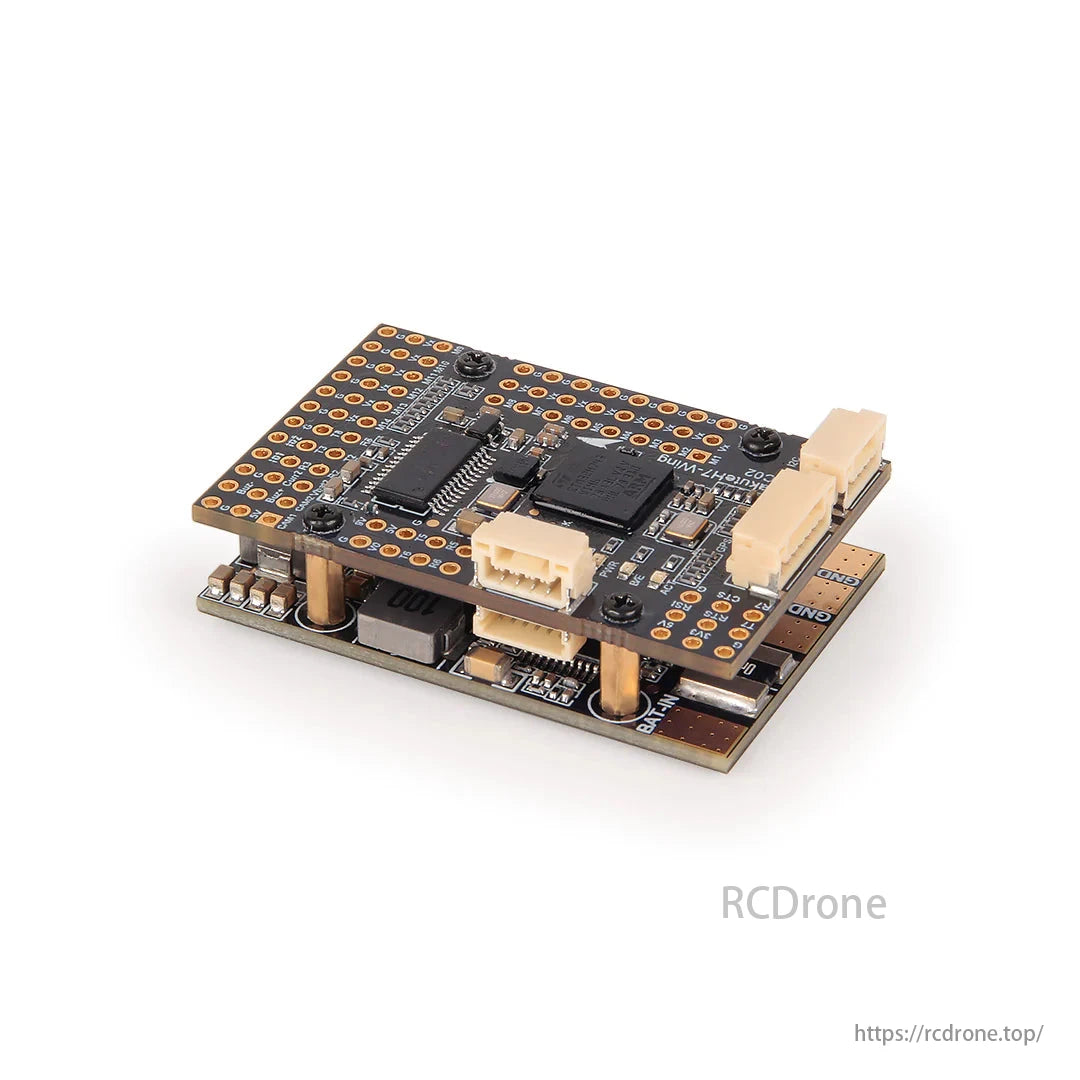
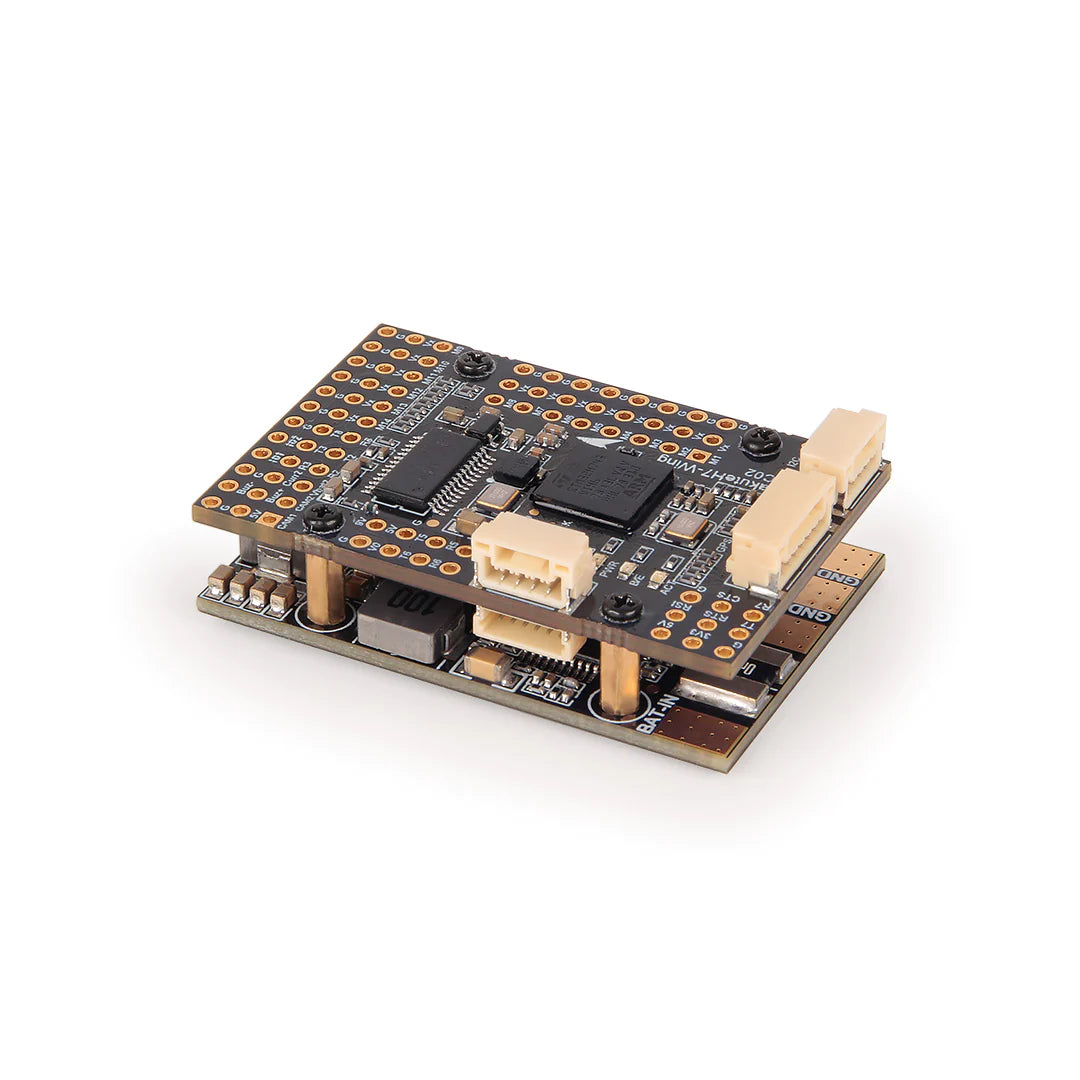
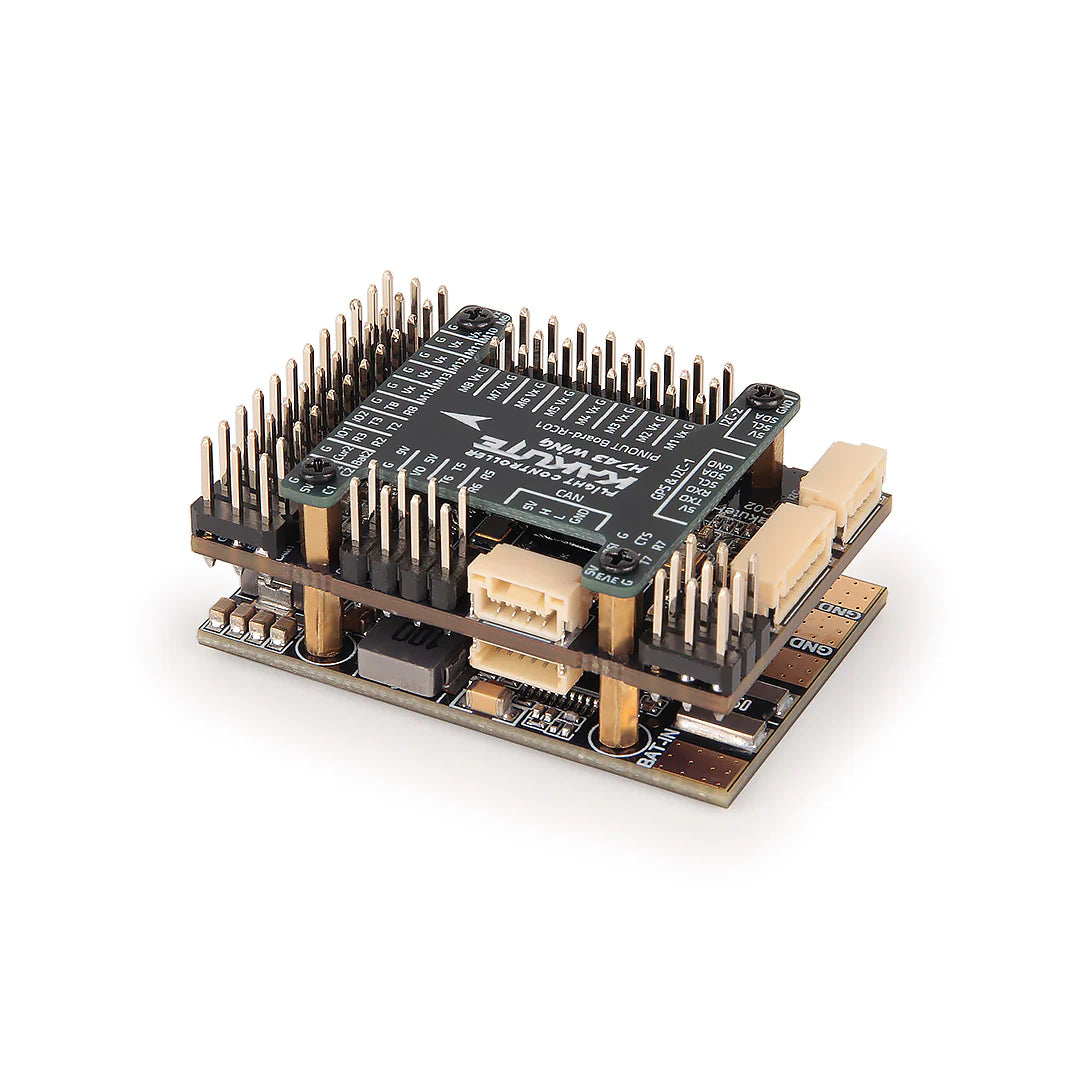
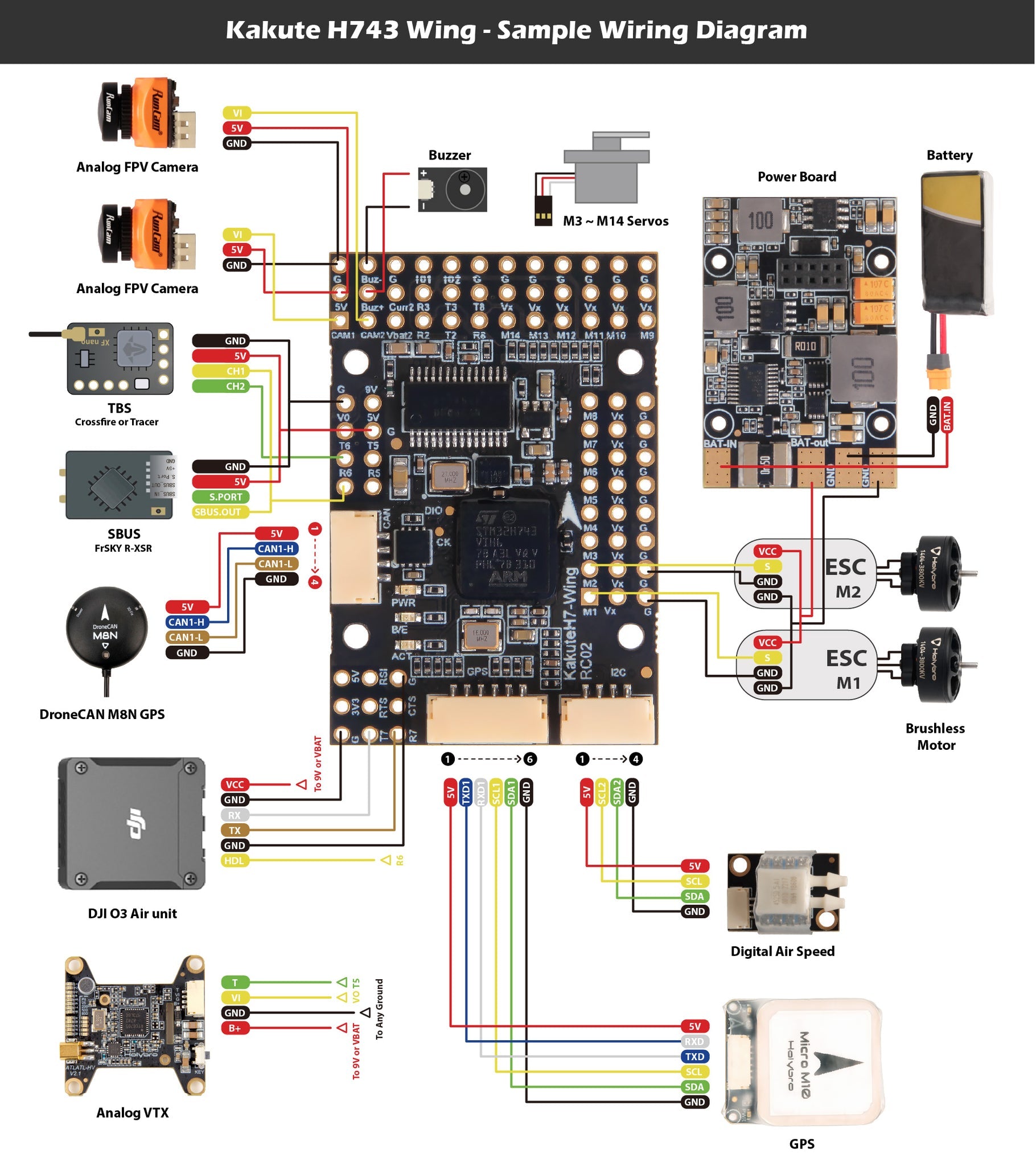
O Holybro Kakute H743 Wing é um controlador de vôo completo com layout específico para aplicações de asa fixa e VTOL. Ele tem o processador STM32 H743 rodando a 480 MHz e suporte para CAN Bus, junto com suporte e switch de câmera dupla, ON/OFF Pit Switch, 5V, 6V/8V, 9V/12 BEC e GPS plug-and-play, CAN, Portas I2C.

Recursos
- MCU STM32H743 rodando a 480 MHz
- IMU ICM-42688-P de alta precisão e baixo ruído
- Suporte para barramento CAN
- Interruptor de entrada de câmera dupla
- 3 saídas BEC integradas 5V, 6V/8V e 9V/12V
- Interruptor de poço ON/OFF 9V/12V
- Sensor de tensão e corrente integrado
- Barômetro BMP280 integrado
- GPS plug-and-play, CAN, portas I2C
- Design pequeno e discreto cabe em estruturas compactas
- Suporta INAV (6.1.1 e posterior), Ardupilot (4.4 e posterior)
Especificações
- MCU: STM32H743, 480 MHz, 1MB de RAM, 2MB de Flash
- IMU: ICM-42688P (SPI3)
- Baro: BMP280 (I2C4)
- OSD: AT7456E (SPI2)
- Blackbox: Slot para cartão MicroSD em SDMMC2
- 7x Uarts (1,2,3,5,6,7,8) com inversão integrada.
- 14x saídas PWM, 1x CAN, 5x ADC (Bat1/Curr1, Bat2/Curr2 e RSSI)
- 3x I2C (I2C1 e I2C2 para dispositivos externos, I2C4 para sensores integrados)
- 3x LEDs para FC STATUS (azul, vermelho) e indicador de 3,3V (verde)
- Extensor de chave USB/DFU com USB Type-C
- Interruptor de entrada de câmera dupla
- 5V/9V(12V) para interruptor de alimentação da câmera/VTX
- Detecção de corrente de alta precisão (90A contínuo, pico de 220A)
- Sensor de tensão da bateria: 5K:25,5K (escala 1800 em INAV, BATT_VOLT_MULT 18,18 em ArduPilot)
- Potência estática 160mA@5V
Suporte de firmware
-
Alvo do Ardupilot: KAKUTEH7-Wing (Ardupilot 4.4 ou mais recente)
- Alvo INAV: KAKUTEH7Wing (INAV 6.1.1 ou mais recente)
PDB
- Faixa de tensão de entrada: 10~36V (3~8S LiPo)
- 1x blocos de alimentação ESC
- Sentido de corrente: 90A contínuo, pico de 220A. (Escala 275 no INAV, 36 A/V no ArduPilot)
Saída BEC 5V
- Projetado para FC, receptor, OSD, câmera, faixa de LED 2812, campainha, GPS, sensor de velocidade do ar, etc.
- Saída 5,15 +/- 0,1V CC
- Corrente contínua 2 A, pico 3A
Saída BEC 9V /12V
- Projetado para transmissor de vídeo, câmera, gimbal etc.
- Corrente contínua 2 A, pico 3A
- Opção de 12V com Jumper pad
Saída BEC Vx
- Projetado para Servos
- Tensão ajustável, 6V padrão, opção de 8V com jumper pad
- Corrente contínua 6 Amps, pico de 8A
Saída BEC 3,3 V
- Regulador Linear
- Corrente contínua: 200mA
Mecânico
- Montagem: 25 x 25mm, furo M2
- Dimensões: 45x 30 x 13.5mm
- Peso: 28g com extensor USB
Link de referência
- Página de documentação do Holybro
- Guia de configuração do interruptor de câmera e interruptor liga/desliga de 9V/12V
- ArdupilotWIKI
- Mapeamento Ardupilot
- Mapeamento INAV
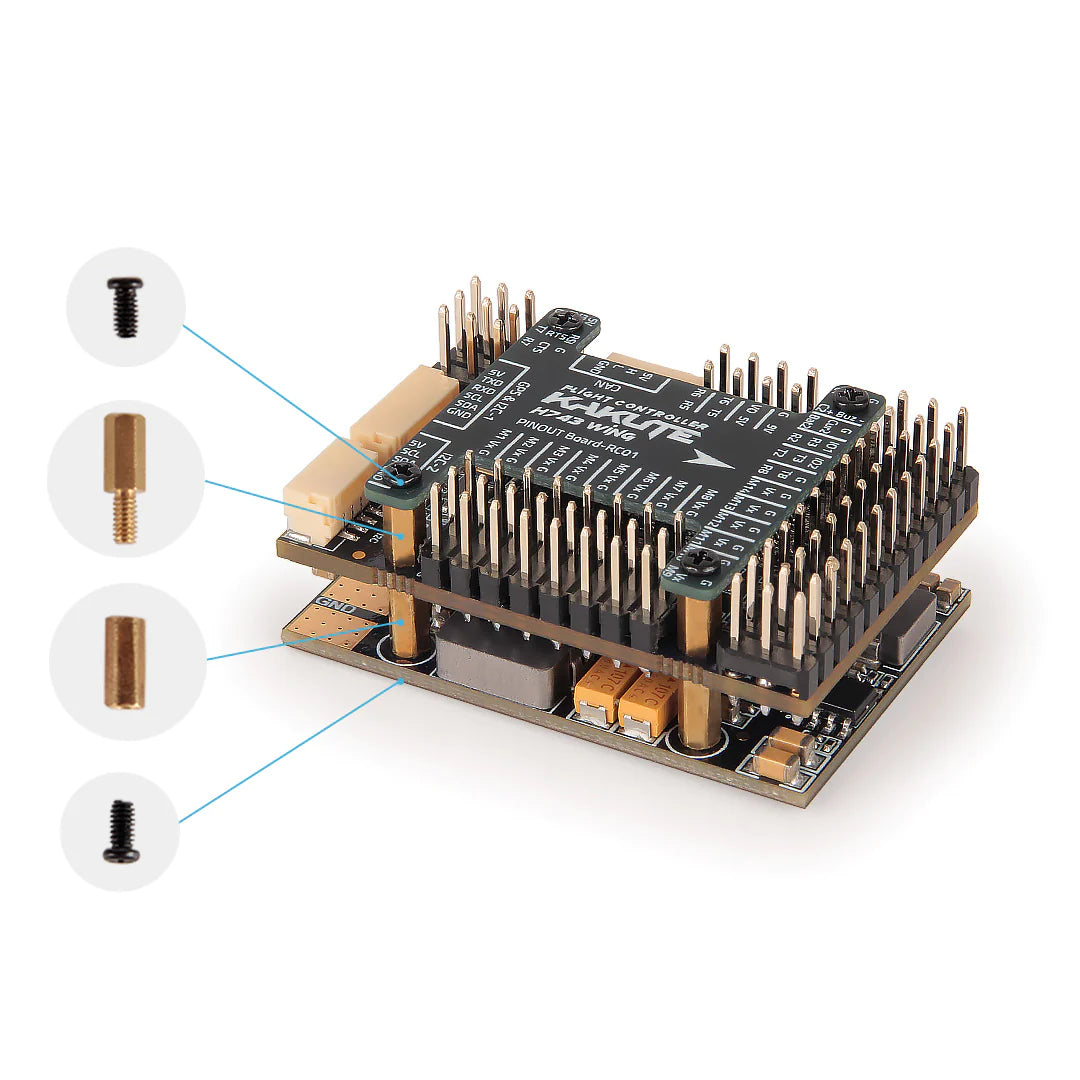
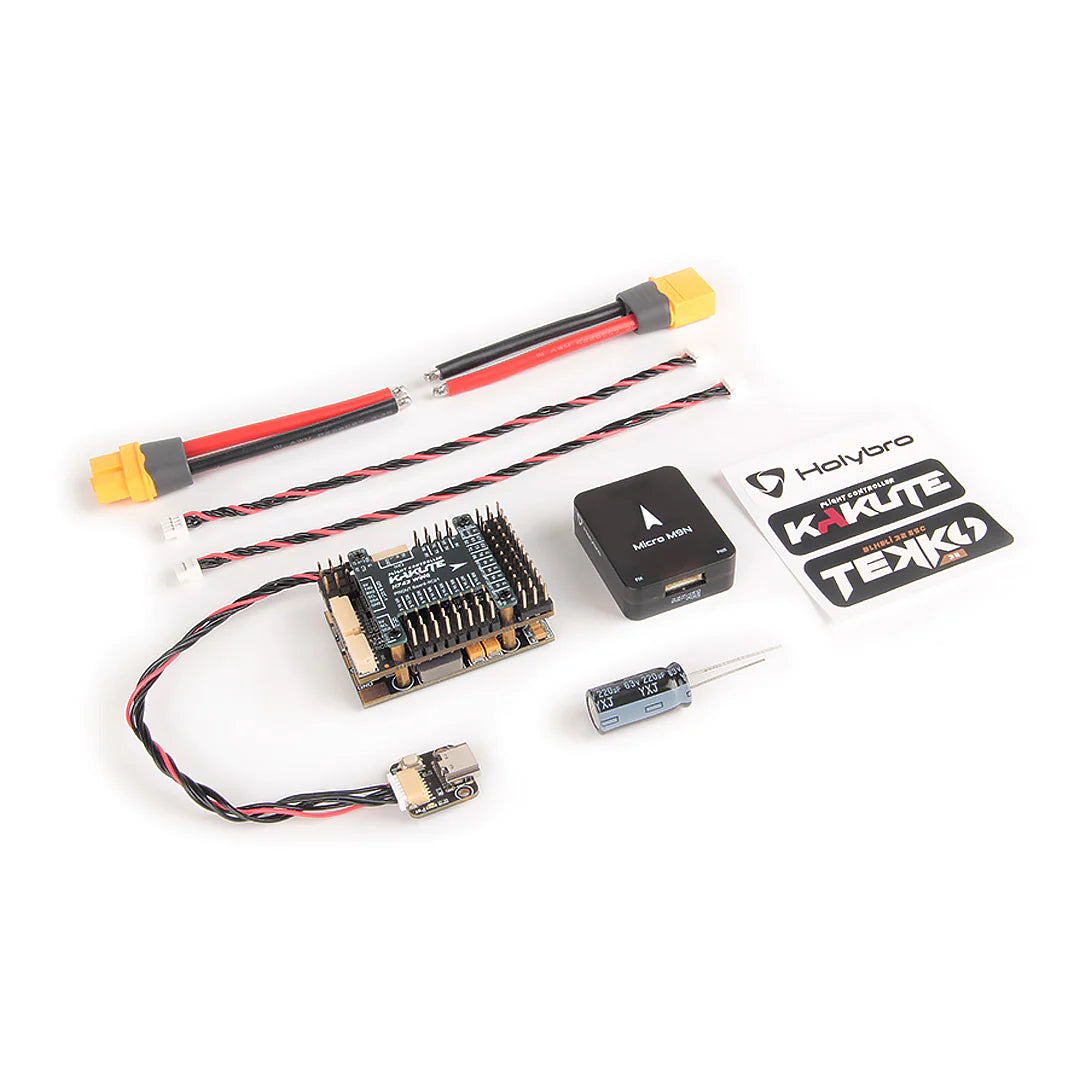
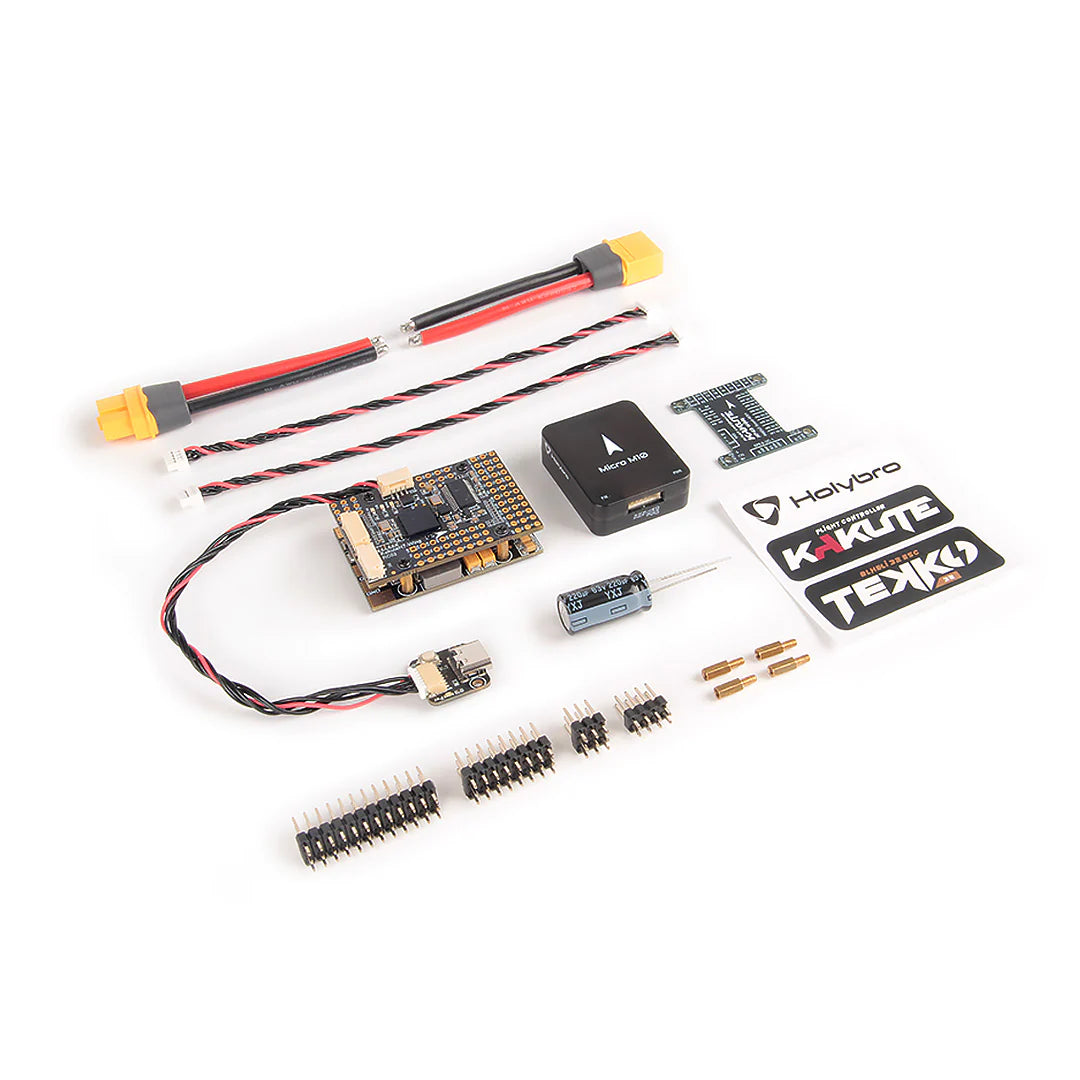
O pacote inclui
- 1x controlador de vôo Kakute H743-Wing
- 1x placa de alimentação
- 1 placa superior
- 1x Placa USB-EXT
- 1x Módulo GPS (Opcional)
- 1x Capacitor eletrolítico: 220uF 62v
- 2x XT60 cabo de alimentação de 60 mm
- Conjuntos 4x Pino DuPont 2,54
- 2 cabos JST-GH de 4 pinos
- 1x 15cm JST-SH Cabo de 6 pinos (para placa USB-EXT)
Manual:
Manual da asa Holybro Kakute H743 v1.0
Related Collections