Controlador de vôo do piloto automático Holybro Pixhawk 4
Controlador de vôo do piloto automático Holybro Pixhawk 4
HolyBro
Não foi possível carregar a disponibilidade de recolha
O Pixhawk® 4 conta com tecnologia avançada de processador da STMicroelectronics®, tecnologia de sensor da Bosch®, InvenSense® e um sistema operacional em tempo real NuttX, proporcionando desempenho, flexibilidade e confiabilidade incríveis para controlar qualquer veículo autônomo.
O microcontrolador do Pixhawk 4 tem uma memória flash de 2 MB e 512 KB de RAM. Com o aumento de potência e recursos de RAM, os desenvolvedores podem ser mais produtivos e eficientes com seu trabalho de desenvolvimento. Algoritmos e modelos mais complexos podem ser implementados no piloto automático.
IMUs de alto desempenho e baixo ruído a bordo são projetadas para aplicações de estabilização. Sinais prontos para dados de todos os sensores são roteados para pinos separados de interrupção e captura de temporizador no piloto automático, permitindo a marcação precisa de tempo dos dados do sensor. Isolamentos de vibração recém-projetados permitem leituras mais precisas, permitindo que os veículos alcancem melhores desempenhos gerais de voo.
Os dois barramentos SPI externos e seis linhas de seleção de chip associadas permitem adicionar sensores adicionais e carga útil com interface SPI. Há um total de quatro barramentos I2C, dois dedicados para uso externo e dois agrupados com portas seriais para módulos GPS/Bússola.
Observação:
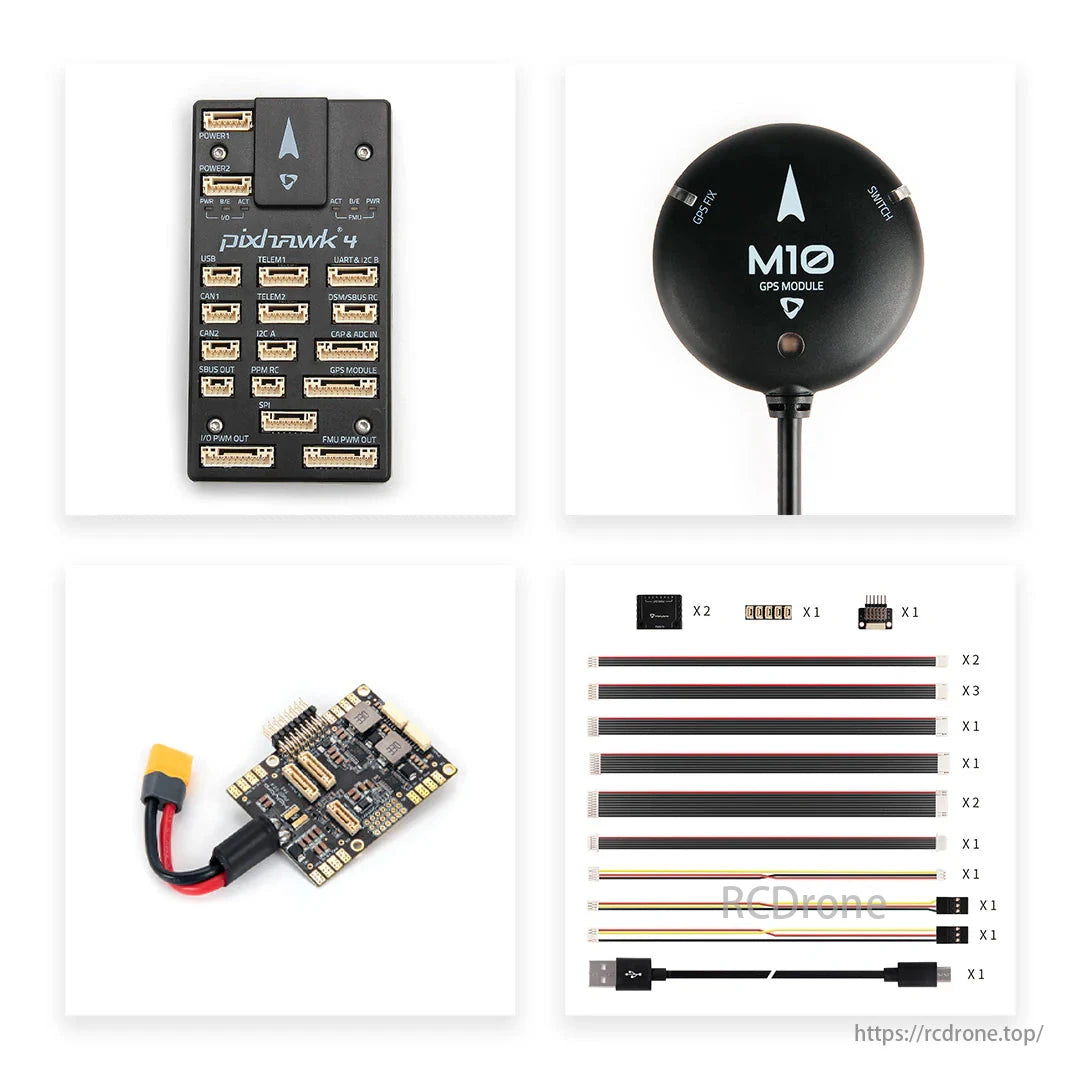
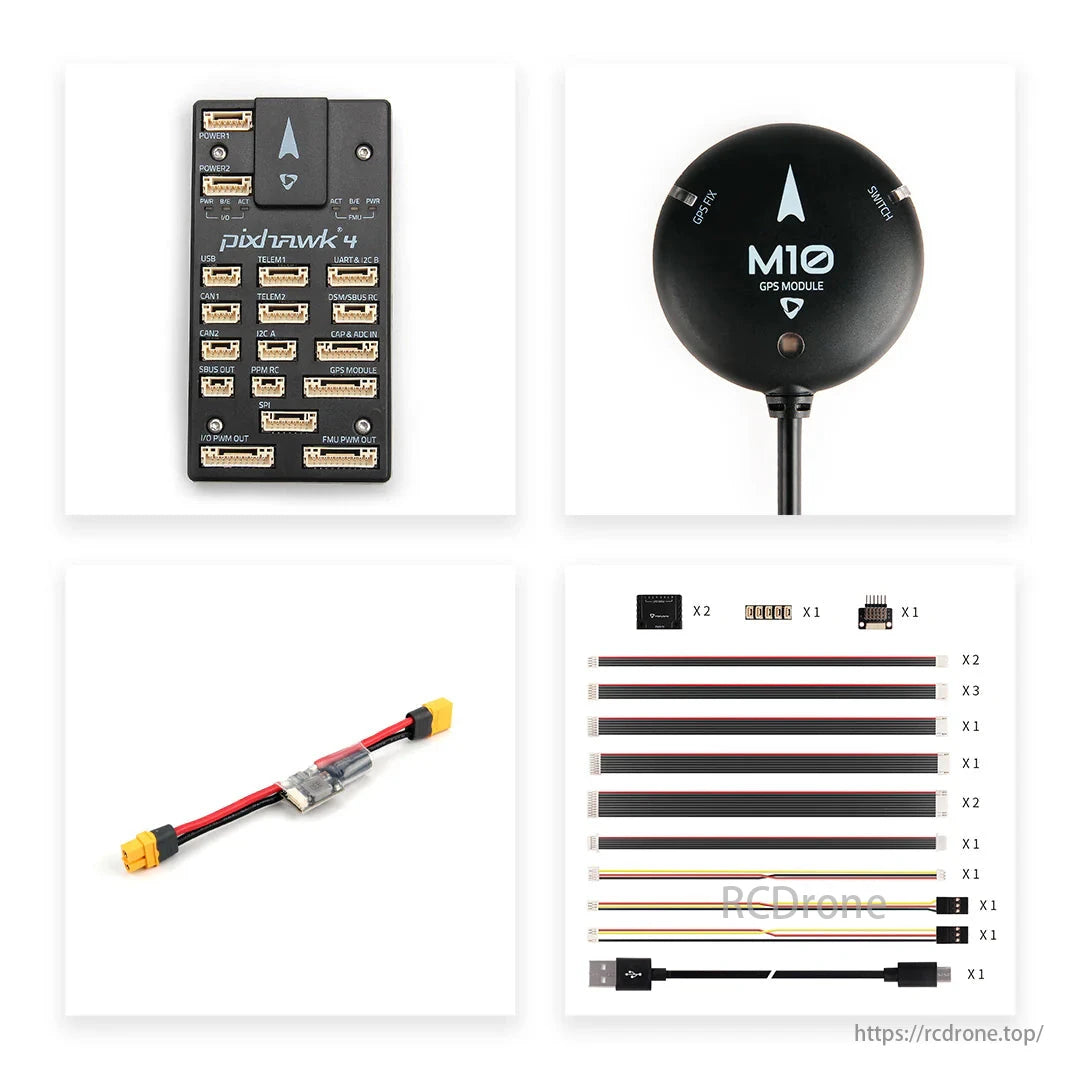
- M10 GPS requer PX4 1.14 e ArduPilot 4.3 ou mais recente.
- Tabela de comparação de módulos de potência
Especificações técnicas
- Processador FMU principal
- STM32F765 - 32 Bit Arm ® Cortex® -M7, 216MHz, 2MB de memória, 512KB de RAM
- STM32F765 - 32 Bit Arm ® Cortex® -M7, 216MHz, 2MB de memória, 512KB de RAM
- Processador IO
- STM32F103 - 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM (Atual)
- STM32F100 - 32 Bit Arm ® Cortex® -M3, 24MHz, 8KB SRAM (Descontinuado)
- Sensores de bordo
- Aceleração/Giroscópio: ICM-20689
- Aceleração/Giroscópio: BMI055/ICM-20602
- Revista: IST8310
- Barômetro: MS5611
- Aceleração/Giroscópio: ICM-20689
Dados Elétricos
- Saída do módulo de potência: 4,9~5,5V
- Tensão máxima de entrada: 6V
- Detecção de corrente máxima: 120A
- Entrada de energia USB: 4,75~5,25 V
- Entrada do trilho servo: 0~36V
- Temperatura de operação: -25-85°C
Dados Mecânicos
- Dimensões: 44x84x12mm
- Peso (caixa de plástico): 33.3g
- Peso (caixa de alumínio): 49g
Transferências:
Código de referência 11032/11035 Inclui:
- Controlador de voo Pixhawk 4 (plástico ou alumínio)
- Conjunto de cabos
Código de referência 20045/20046/20114/20115 Inclui:
- Controlador de voo Pixhawk 4 (Plástico ou Alumínio)
- Módulo de potência: PM02 V3 12S/PM07 14S
- Conjunto de cabos
Código de produto 20139/20140/20141/20142/20269/20270/20271/20272 Inclui:
- Controlador de voo Pixhawk 4
- Módulo de potência: PM02 V3 12S/PM07 14S
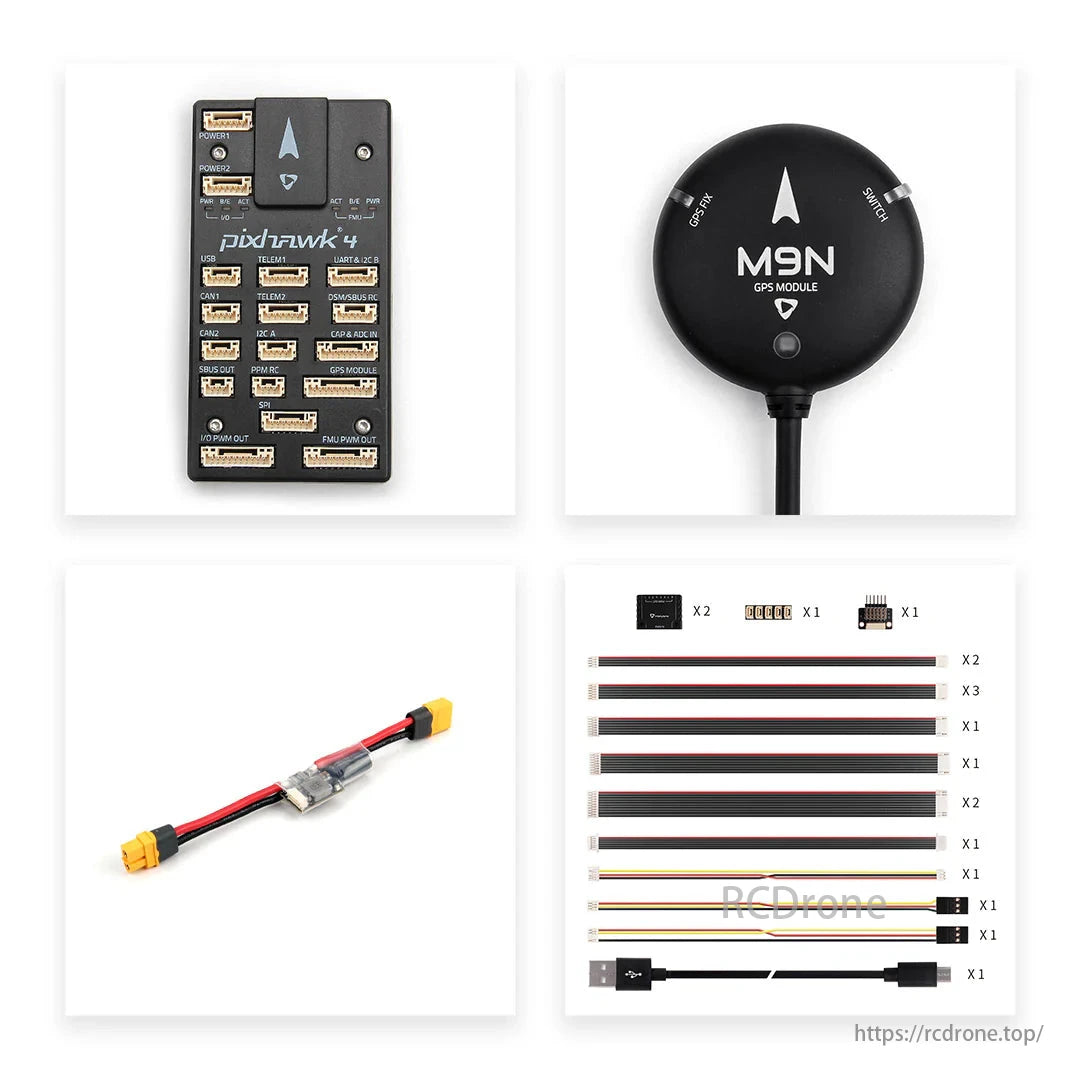
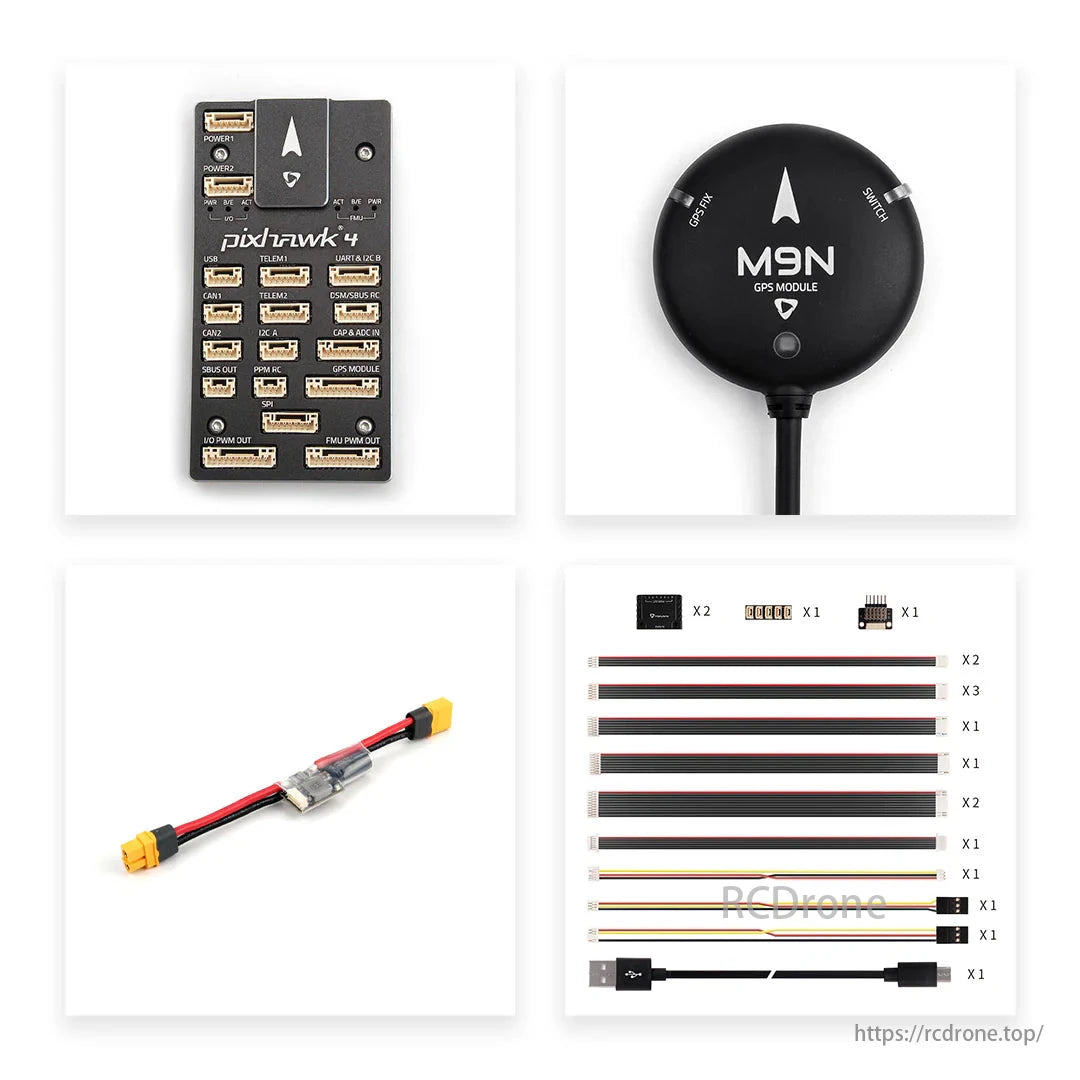
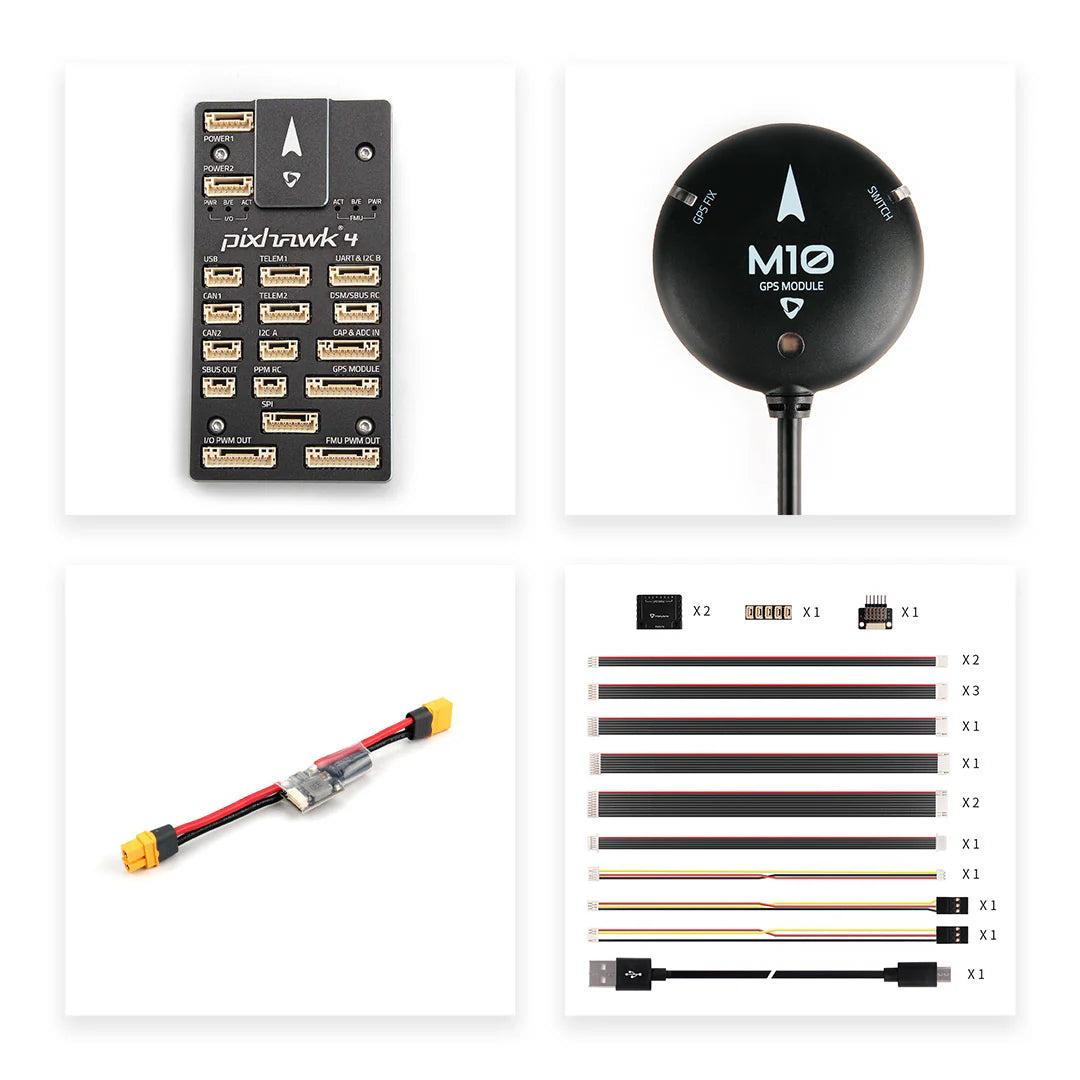
- GPS: M9N/M10
- Conjunto de cabos

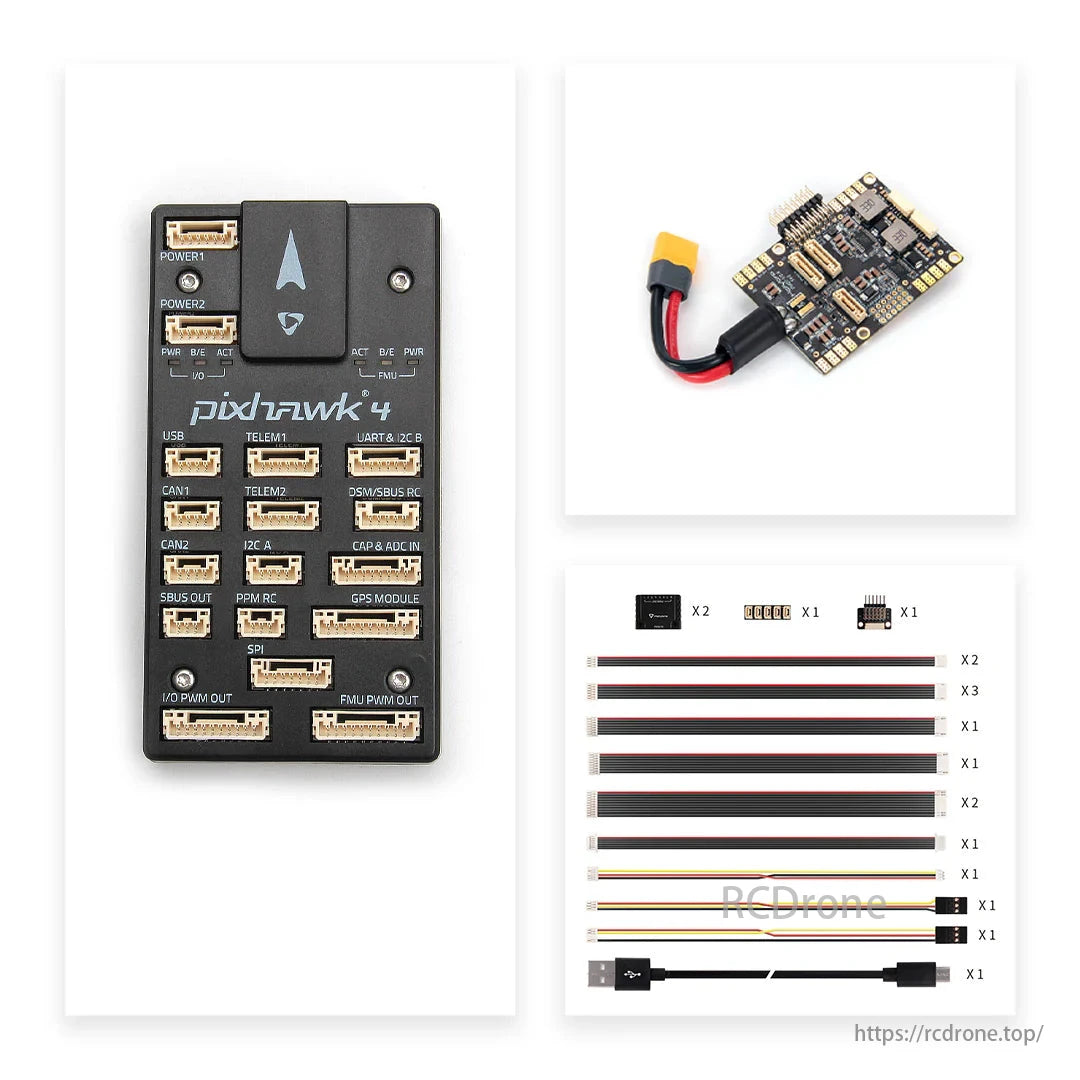
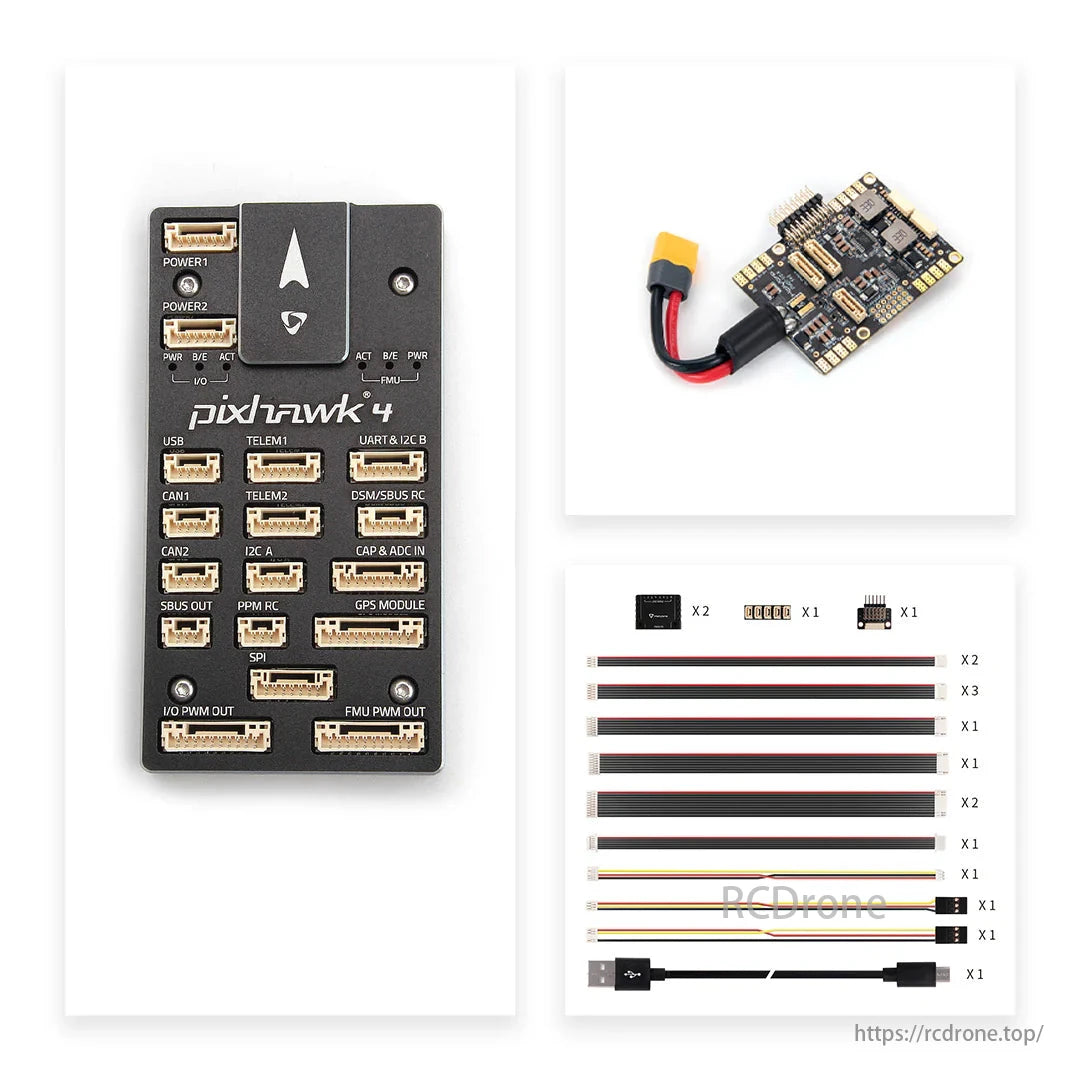
Controlador de voo Pixhawk 4 com várias portas, incluindo USB, CAN, TELEM, UART, I2C, SBUS OUT, PPM RC, SPI e MÓDULO GPS.

Controlador de voo Pixhawk, alimentado pelo sistema de piloto automático PX4.

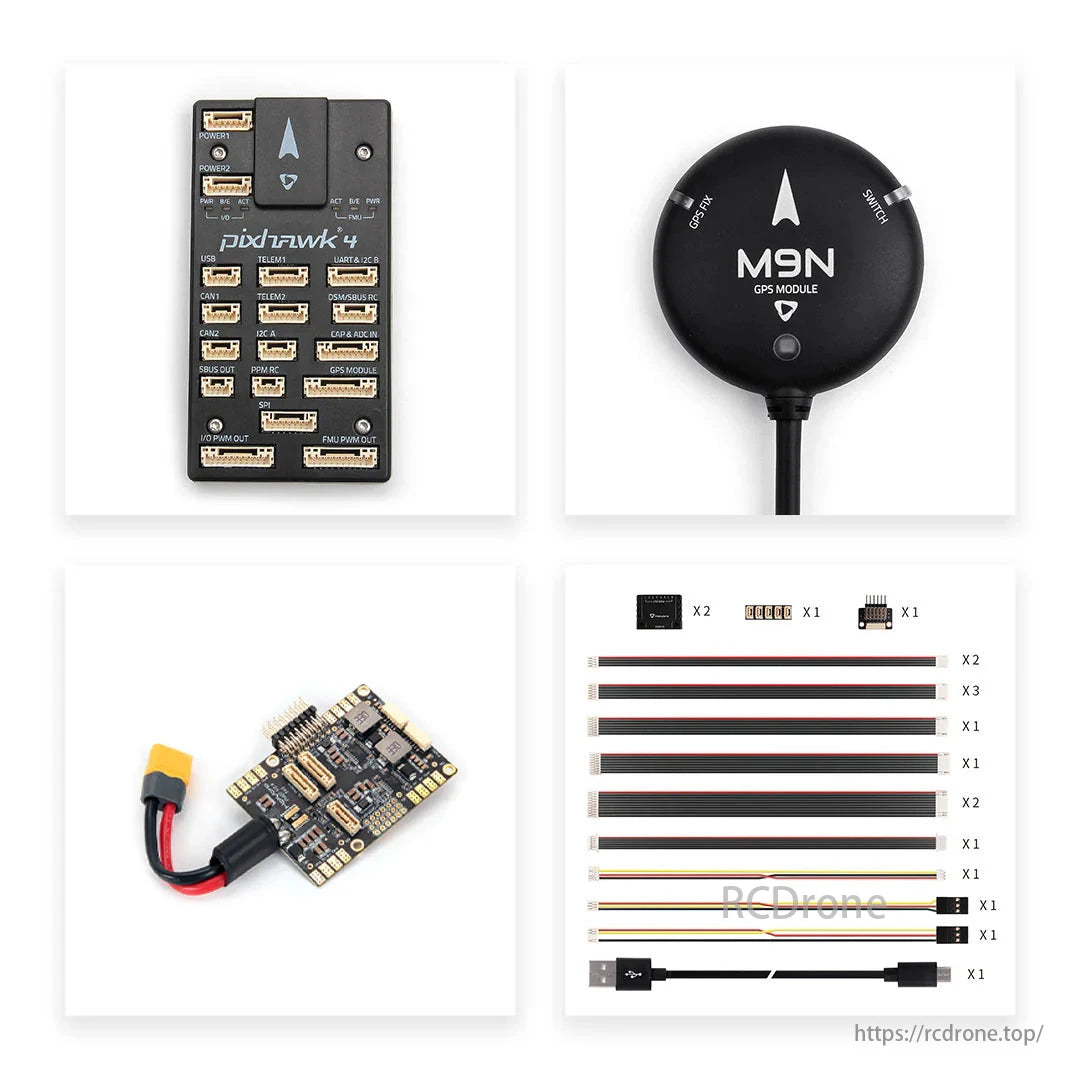
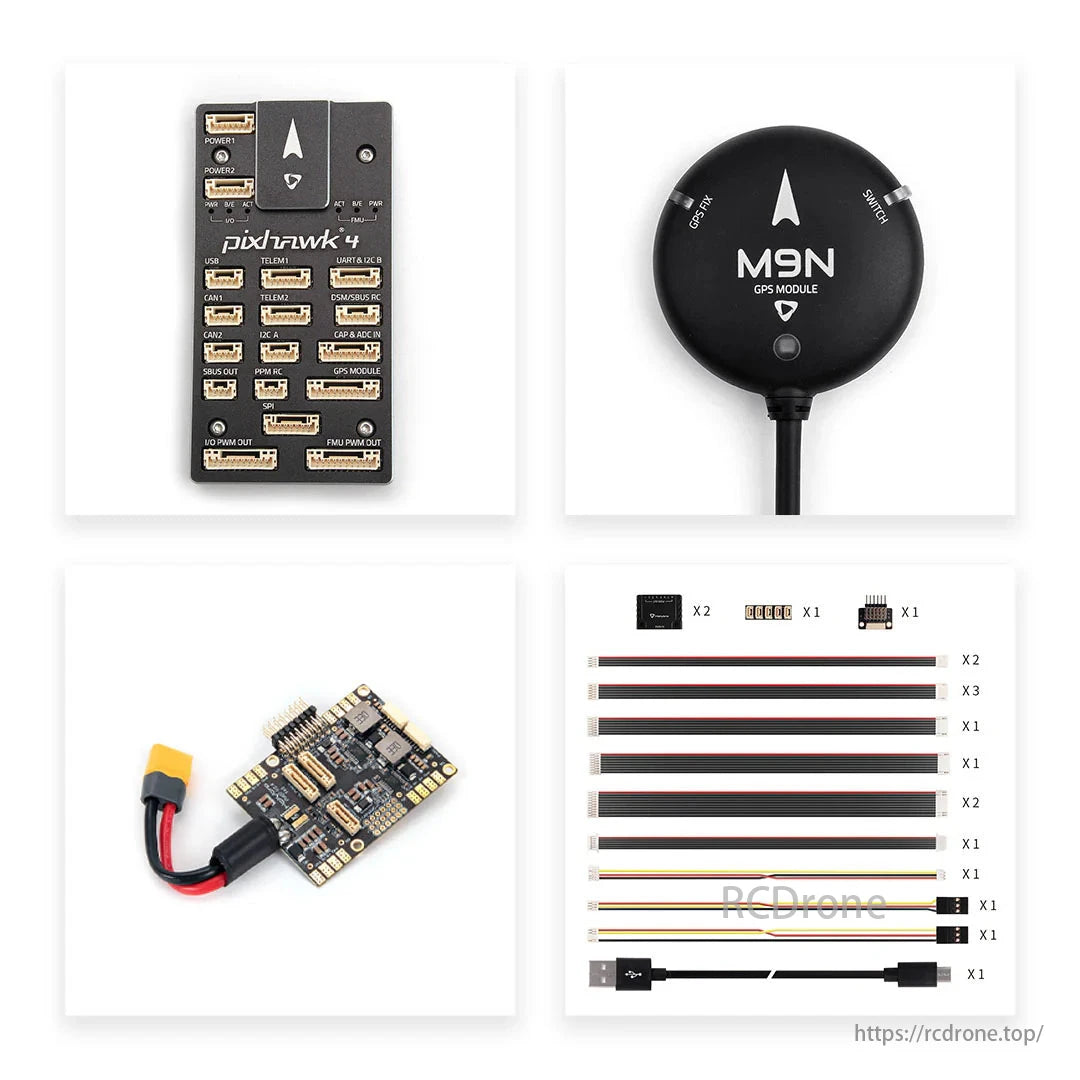
Controlador de voo Pixhawk 4, módulo GPS M9N, módulo de energia com conector XT60 e vários cabos para montagem de drone RC.

Controlador de voo Pixhawk 4 com várias portas, incluindo USB, CAN e módulo GPS. Inclui um módulo de energia e vários cabos para conexões.

Controlador de voo Pixhawk 4, módulo GPS M9N, módulo de energia com conector XT60 e vários cabos para conexões.
Related Collections