Controlador de vôo do piloto automático Holybro Pixhawk 5X
Controlador de vôo do piloto automático Holybro Pixhawk 5X
HolyBro
Não foi possível carregar a disponibilidade de recolha
O Pixhawk® 5X é a atualização mais recente da bem-sucedida família de Pixhawk® controladores de voo, baseados no Pixhawk® FMUv5X Open Standard e no Pixhawk® Autopilot Bus Standard. Ele vem com o mais recente PX4 Autopilot® pré-instalado, redundância tripla, controle de temperatura e domínio de sensor isolado, proporcionando desempenho e confiabilidade incríveis.
Dentro do Pixhawk® 5X, você pode encontrar um STM32F7 baseado na STMicroelectronics®, emparelhado com a tecnologia de sensores da Bosch®, InvenSense®, proporcionando flexibilidade e confiabilidade para controlar qualquer veículo autônomo, adequado para aplicações acadêmicas e comerciais. O microcontrolador F7 do Pixhawk® 5X tem 2 MB de memória flash e 512 KB de RAM. O PX4 Autopilot aproveita o aumento de potência e RAM. Graças ao poder de processamento atualizado, os desenvolvedores podem ser mais produtivos e eficientes com seu trabalho de desenvolvimento, permitindo algoritmos e modelos complexos.
O padrão aberto FMUv5X inclui IMUs de alto desempenho e baixo ruído a bordo, projetadas para melhor estabilização. IMU tripla redundante e barômetro duplamente redundante em barramentos separados. Quando o PX4 Autopilot detecta uma falha de sensor, o sistema alterna perfeitamente para outro para manter a confiabilidade do controle de voo.
Um LDO independente alimenta cada conjunto de sensores com controle de energia independente. Um isolamento de vibração recém-projetado para filtrar vibração de alta frequência e reduzir ruído para garantir leituras precisas, permitindo que os veículos alcancem melhores desempenhos gerais de voo. O barramento de sensor externo (SPI5) tem duas linhas de seleção de chip e sinais prontos para dados para sensores adicionais e carga útil com interface SPI, e com um Microchip Ethernet PHY integrado (LAN8742AI-CZ-TR), a comunicação de alta velocidade com computadores de missão via ethernet agora é suportada. Duas portas de monitoramento de bateria inteligente (SMBus), suporte para módulo de energia INA226 SMBus.
O Pixhawk® 5X é perfeito para desenvolvedores em laboratórios de pesquisa corporativa, startups, acadêmicos (pesquisa, professores, alunos) e aplicações comerciais. O Pixhawk 5X é compatível com ambos PX4 Piloto automático & Firmware do Ardupilot.
Observação:
- O Pixhawk 5X requer protocolo I2C para dados de tensão e corrente do módulo de energia, como PM02D, módulo de energia analógico (PM02, PM06, PM07) não são compatíveis com Pixhawk 5X. Tabela de comparação de módulos de potência
- Ele vem com firmware PX4 por padrão. O usuário também pode usar o firmware Ardupilot atualizando o firmware via Mission Planner ou QGroundControl.
Principais pontos de design
- Controlador de voo modular: IMU, FMU e sistema base separados conectados por um conector Pixhawk® Autopilot Bus de 100 pinos e 50 pinos, projetado para sistemas flexíveis e personalizáveis
- Redundância: 3 sensores IMU e 2 sensores Barômetro em barramentos separados, permitindo operação paralela e contínua mesmo em caso de falha de hardware
- Domínios de redundância tripla: domínios de sensores completamente isolados com barramentos separados e controle de energia separado
- Sistema de isolamento de vibração para filtrar vibrações de alta frequência e reduzir ruídos para garantir leituras precisas
- Interface Ethernet para integração de computador de missão de alta velocidade
- Calibração automatizada do sensor, eliminando sinais e temperaturas variáveis
- As IMUs são controladas por temperatura por resistores de aquecimento integrados, permitindo uma temperatura de trabalho ideal das IMUs
Especificação técnica
- Processador FMU: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB de memória, 512KB de RAM
- Processador IO: STM32F100
- Arm® Cortex®-M3 de 32 bits, 24 MHz, SRAM de 8 KB
- Sensores de bordo
- Acel/Gyro: ICM-20649 (montado rigidamente)
- Acel/Giroscópio: ICM-42688P (montagem suave)
- Acel/Giroscópio: ICM-20602 ou BMI088 (Montagem suave)
- Revista: BMM150
- Barômetro: 2x BMP388
Dados elétricos
- Classificações de voltagem:
- Tensão máxima de entrada: 6V
- Entrada de energia USB: 4,75~5,25 V
- Entrada do trilho servo: 0~36V
Interfaces
- 16- Saídas servo PWM
- Entrada R/C para Spektrum / DSM
- Entrada R/C dedicada para entrada PPM e S.Bus
- Entrada RSSI analógica/PWM dedicada e S.Saída de barramento
- 4 portas seriais de uso geral
- 3 com controle de fluxo total
- 1 com limite de corrente separado de 1A
- 1 com I2C e linha GPIO adicional para leitor NFC externo
- 2 portas GPS
- 1 GPS completo mais porta de interruptor de segurança
- 1 porta GPS básica
- 1 porta I2C
- 1 porta Ethernet
- Aplicações sem transformador
- 100 Mbps
- 1 barramento SPI
- 2 linhas de seleção de chips
- 2 linhas prontas para dados
- 1 linha SPI SYNC
- 1 linha de redefinição SPI
- 2 CAN Buses para periféricos CAN
- O barramento CAN possui controles silenciosos individuais ou controle ESC RX-MUX
- 2 portas de entrada de energia com SMBus
- 1 porta AD e IO
- 2 entradas analógicas adicionais
- 1 entrada PWM/Captura
- 2 linhas dedicadas de depuração e GPIO
Dados mecânicos
- Dimensões
- Módulo do controlador de voo: 38,8 x 31,8 x 14,6 mm
- Mini Rodapé: 43,4 x 72,8 x 14,2 mm
- Rodapé padrão v1: 52,4 x 103,4 x 16,7 mm
- Rodapé padrão v2A: 40,2 x 92,3 x 18,4 mm
- Rodapé padrão v2B: 40,2 x 98,3 x 16,9 mm
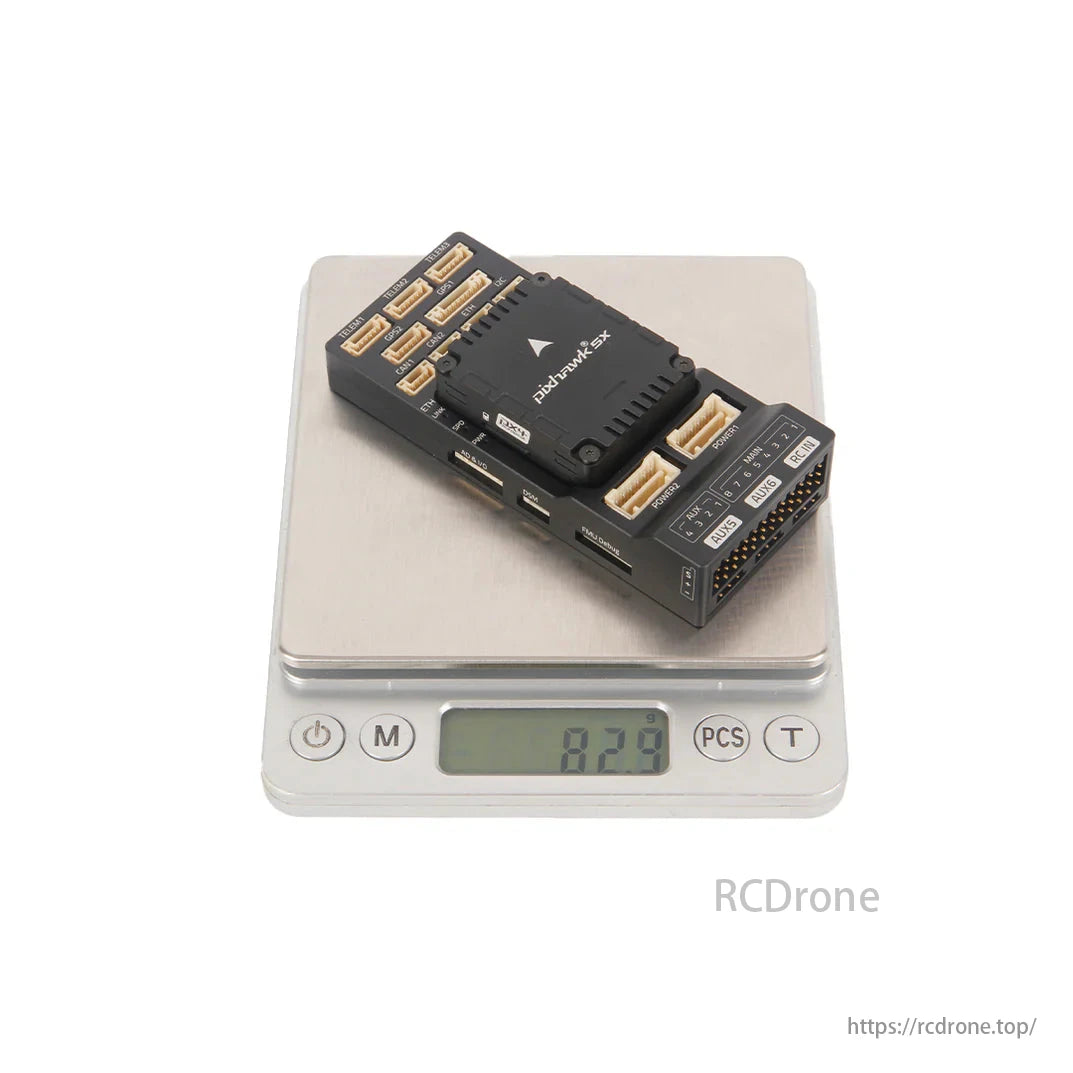
- Peso
- Módulo Controlador de Voo: 23g
- Mini Rodapé: 26.8g
- Rodapé padrão v1: 51g
- Rodapé padrão v2A: 58g
- Rodapé padrão v2B: 58g
SKU 11045 inclui:
- Módulo controlador de voo Pixhawk 5X
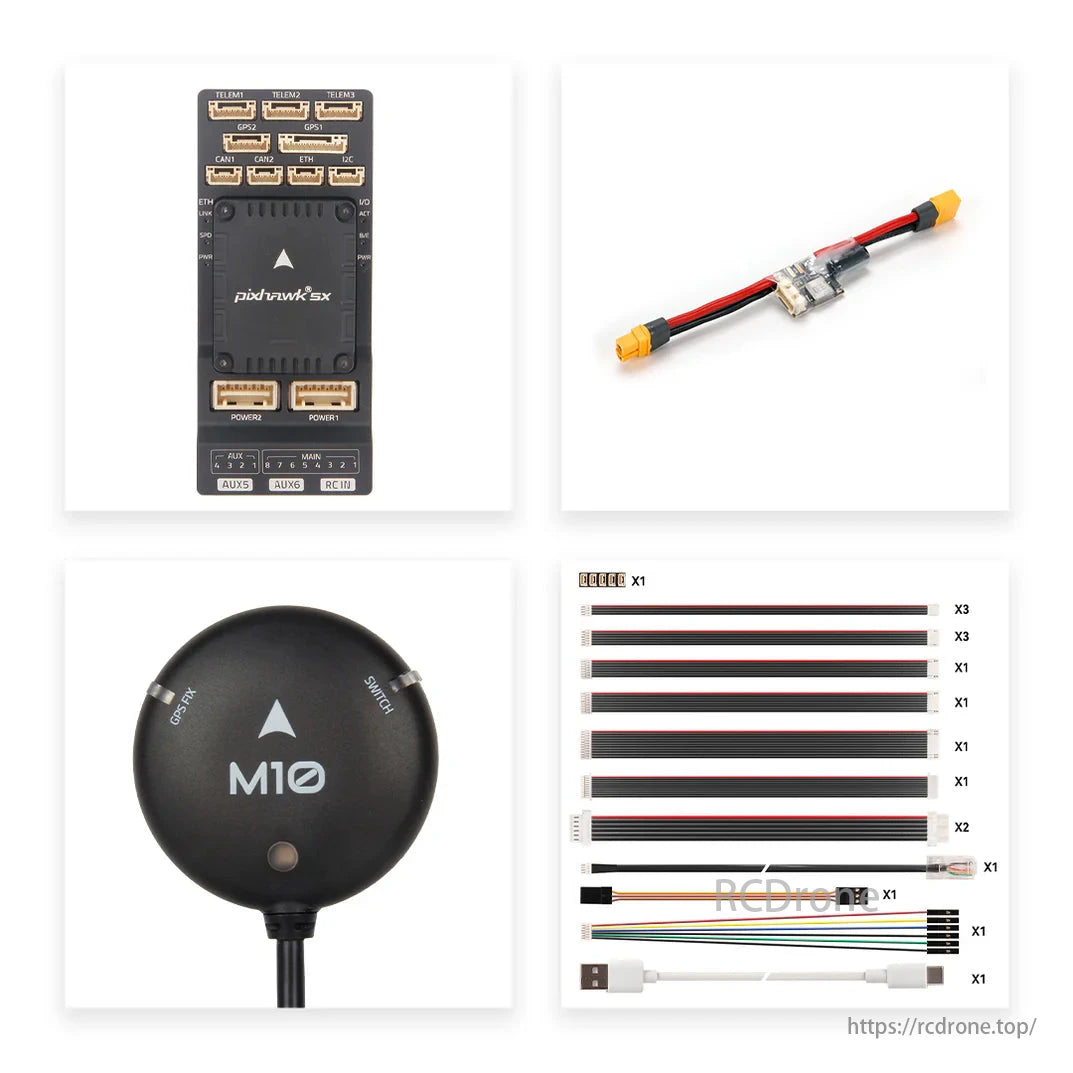
SKU 20307/SKU 20320/SKU20310 inclui:
- Módulo controlador de voo Pixhawk 6X
- Rodapé padrão v2A/v2B ou mini rodapé
- Módulo de potência PM02D HV
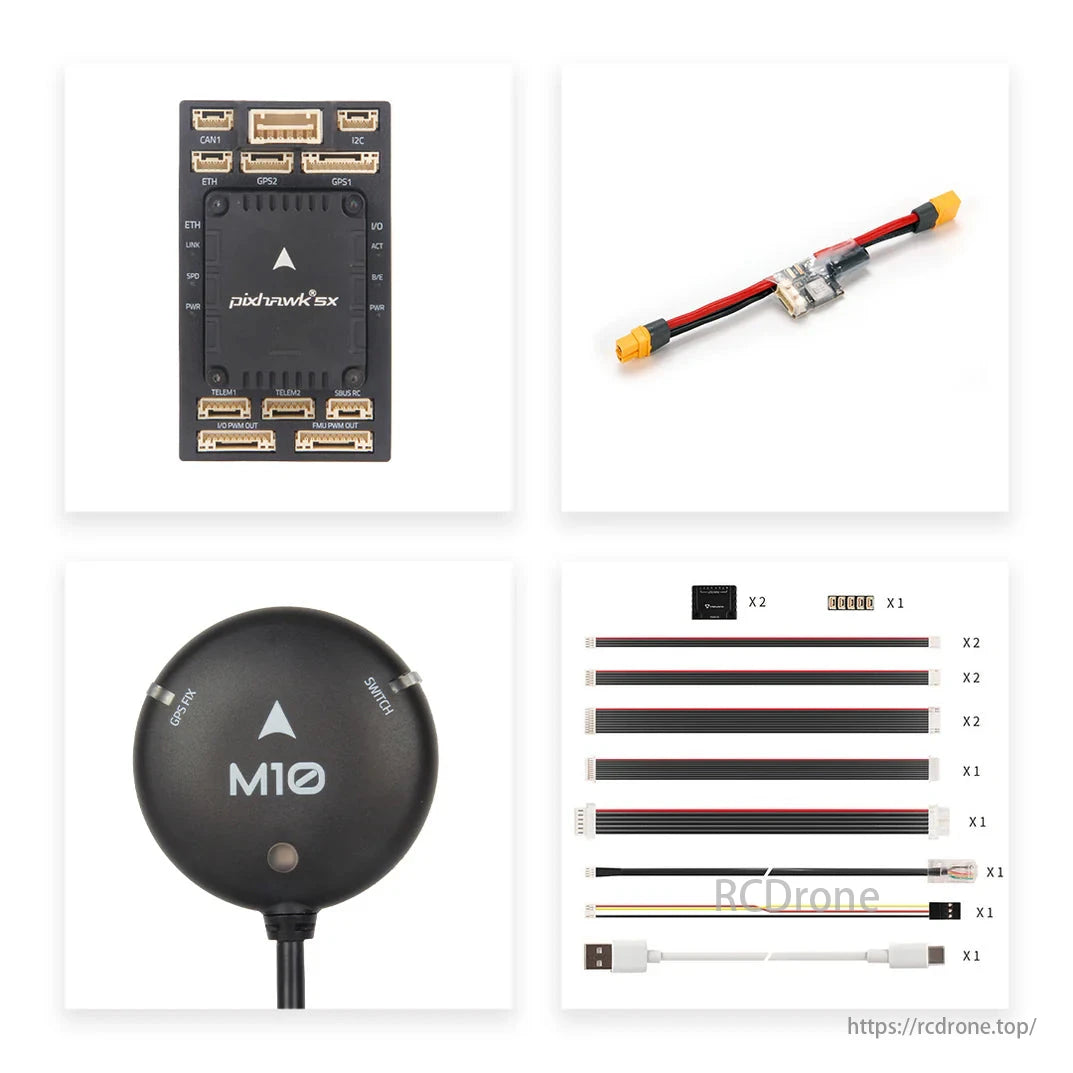
- Conjunto de cabos
- Módulo controlador de voo Pixhawk 6X
- Rodapé padrão v2A/v2B ou mini rodapé
- Módulo de potência PM02D HV
- Conjunto de cabos
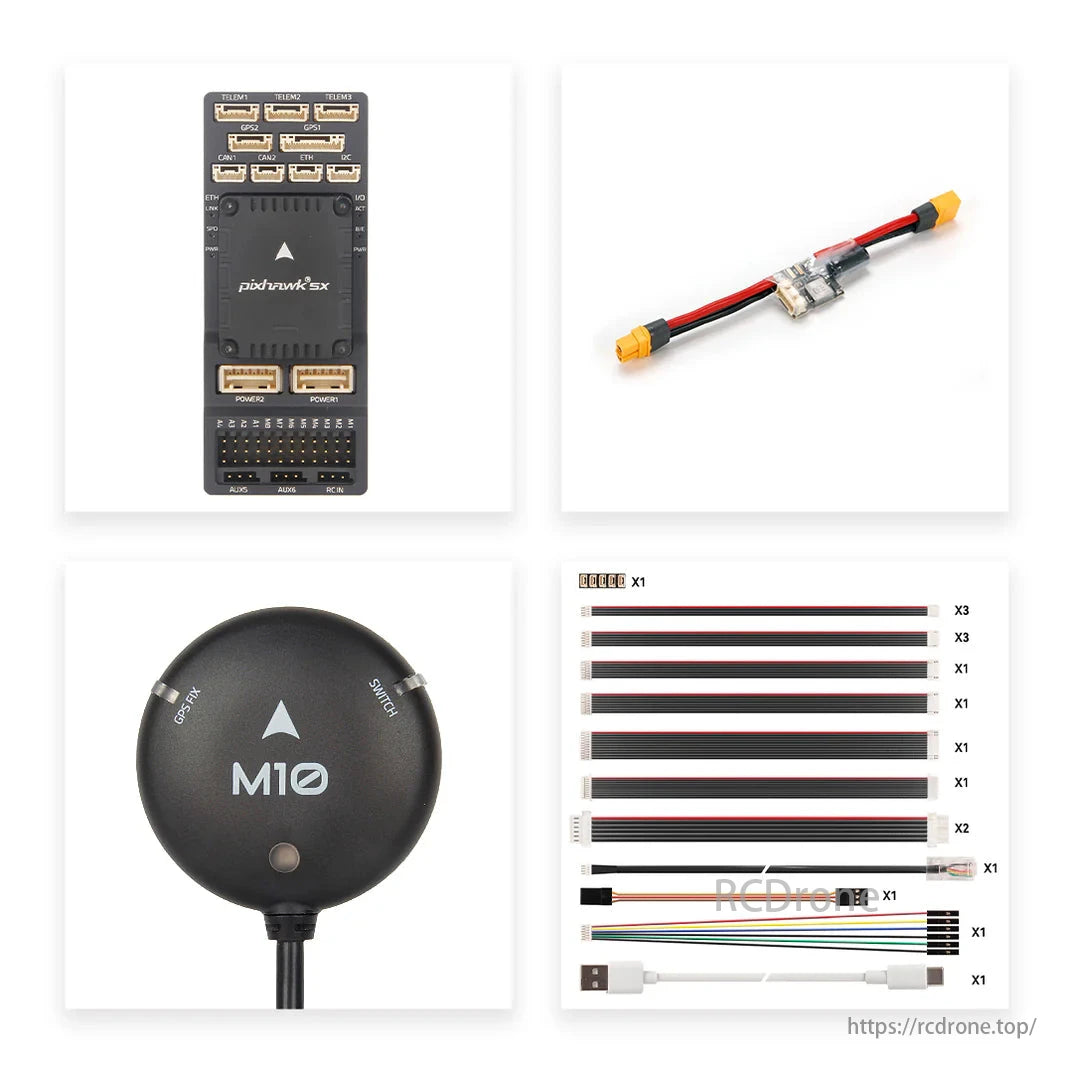
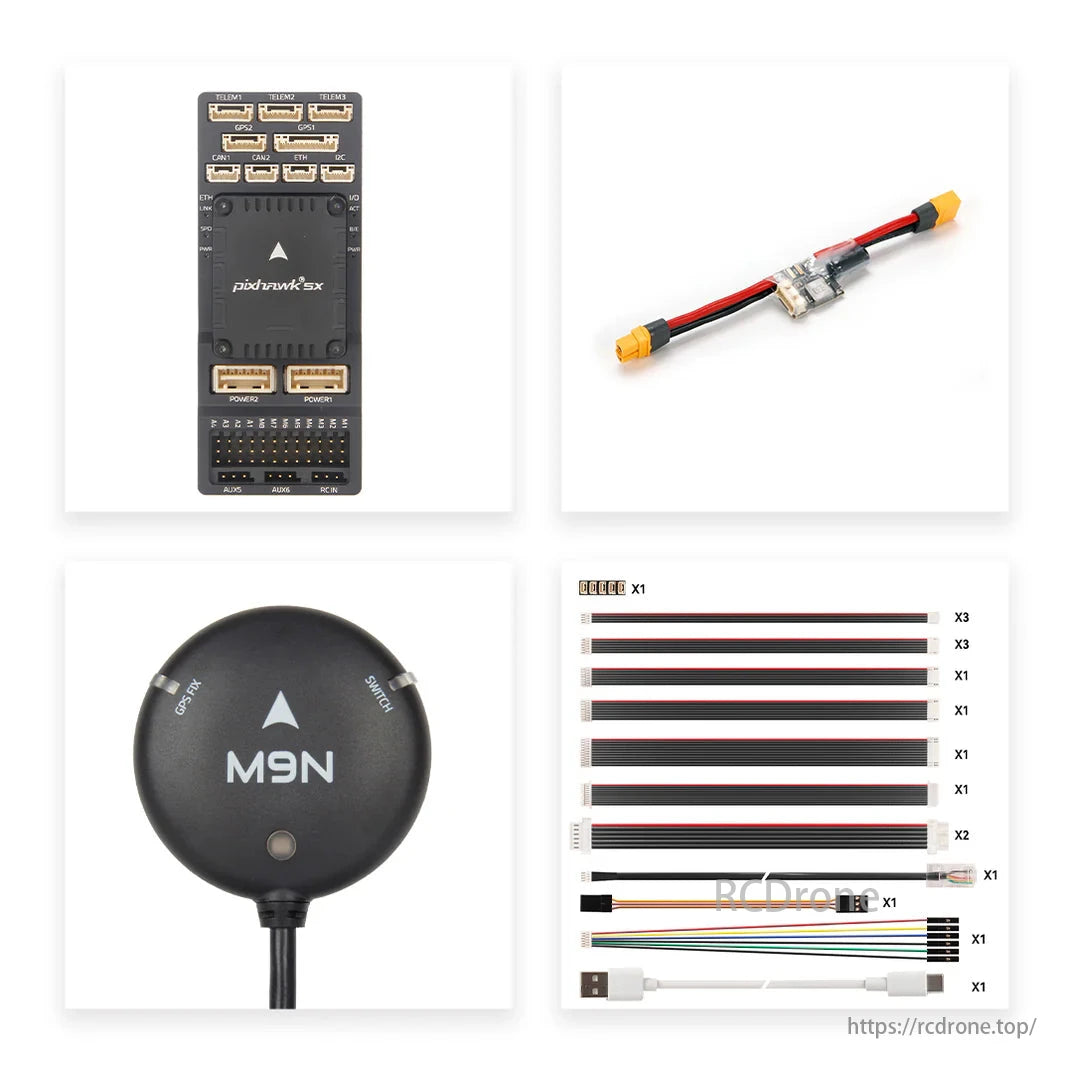
- M9N/M10 GPS
Pixhawk mini, Pixhawk Baseboard v1 e duas variantes do Pixhawk Baseboard v2 (v2A e v2B) são mostradas com dimensões. O mini tem 43,4 x 72,8 mm, o v1 tem 52 x 101,90 mm, o v2A tem 40,2 x 92,3 mm e o v2B tem 40,2 x 98,3 mm.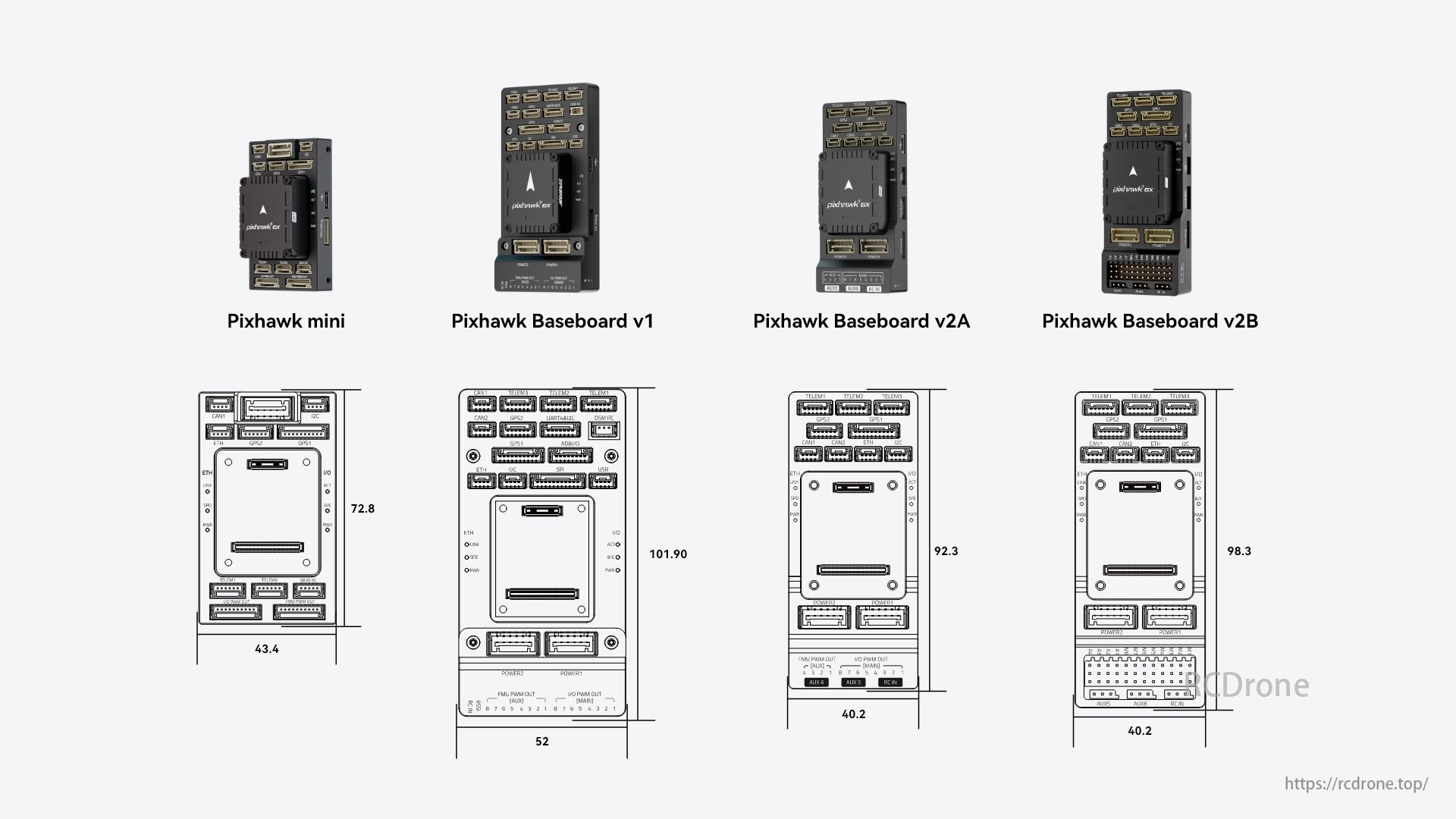
Guia de amostra de fiação

O diagrama do Holybro Pixhawk 5X inclui GPS primário e secundário, portas UART4 e I2C, CAN1 e 2, receptor DSM RC, rádio de telemetria, câmera IP HD FPV, bateria, módulo de energia, ESCs e uma placa de distribuição de energia.
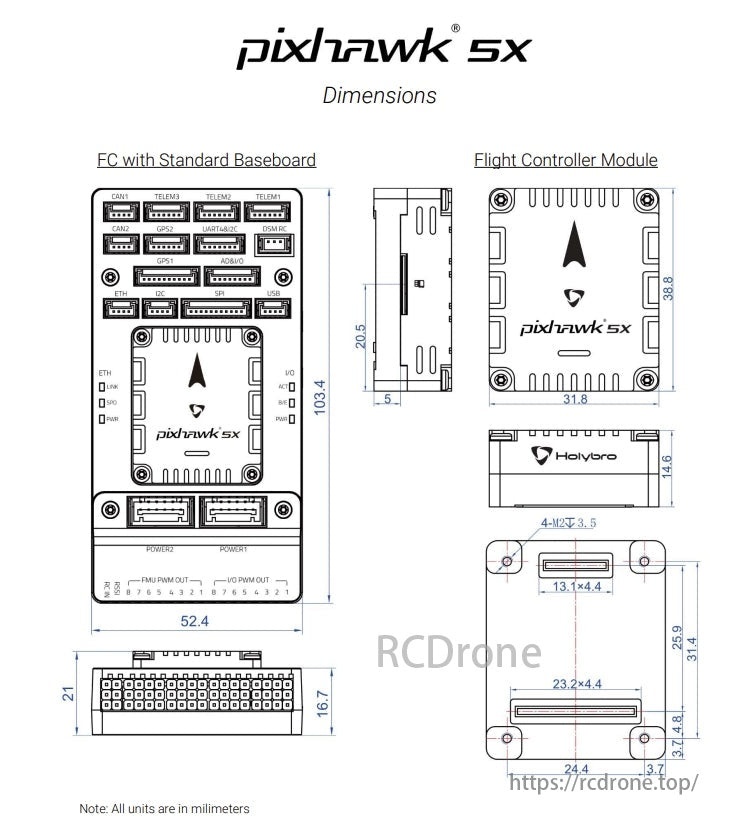
As dimensões do Pixhawk SX incluem um módulo controlador de voo e FC com rodapé padrão. O módulo mede 31,8 x 38,8 mm, enquanto o rodapé tem 103,4 x 52,4 mm. Todas as unidades estão em milímetros.

Dimensões padrão da placa de base: 103,4 x 58 x 10,7 mm, com várias portas e conectores, incluindo USB, Ethernet e entradas de energia.


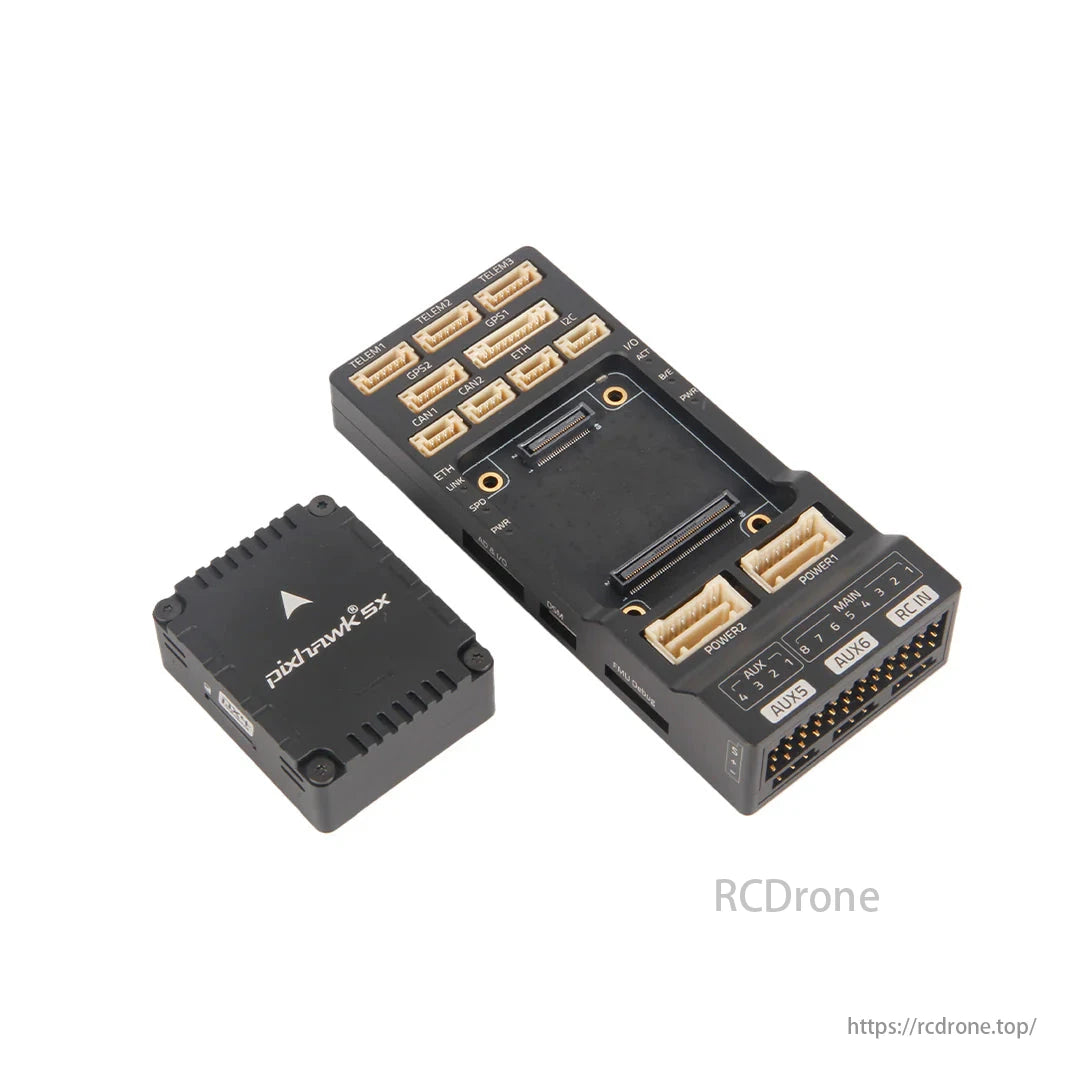
Controlador de voo Pixhawk 5X com portas TELEM1-3, GPS1-2, CAN1-2, ETH, I2C, POWER1-2, AUX5-6 e RC IN.
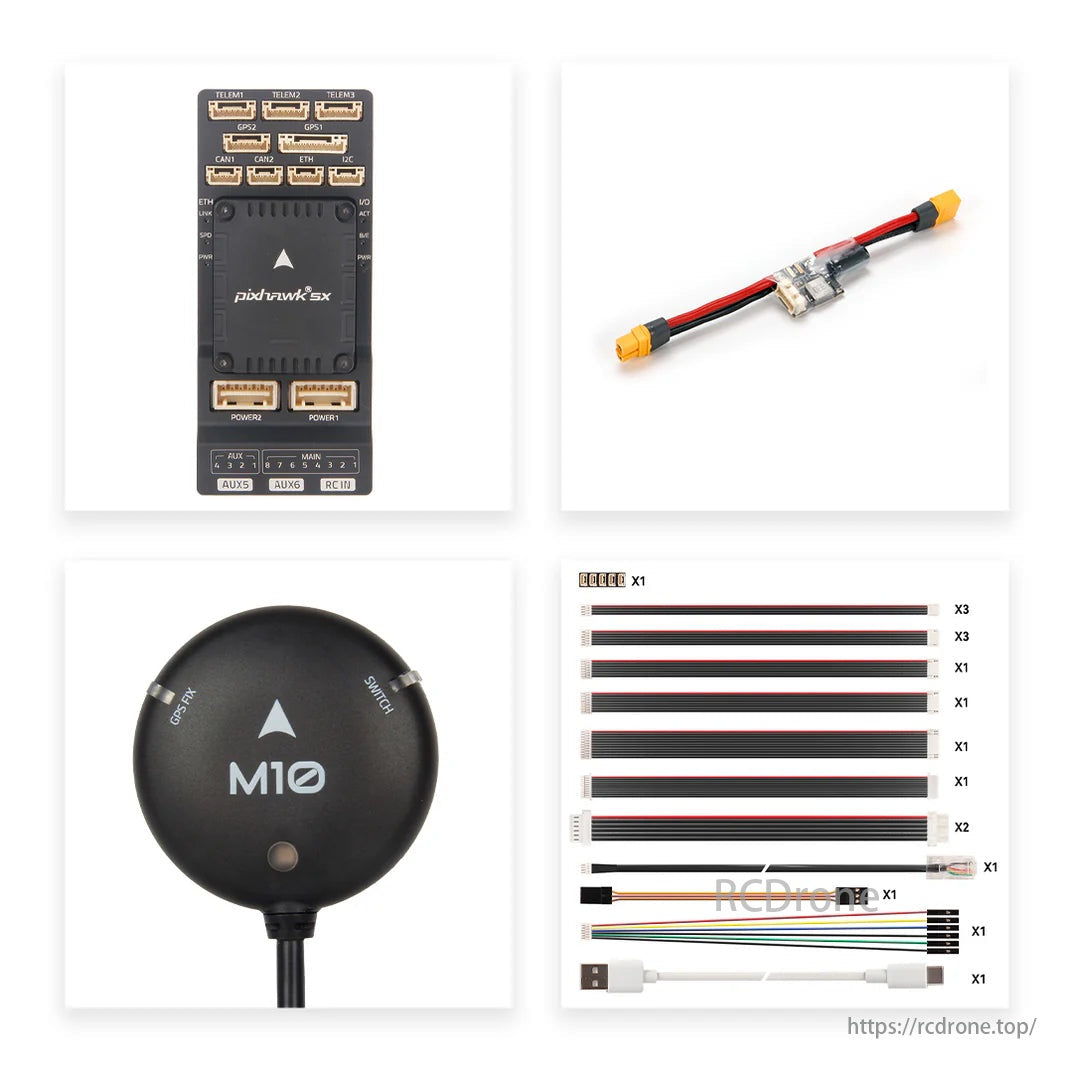
Controlador de voo Pixhawk 5X, módulo GPS M10, módulo de energia e vários cabos para montagem do drone.
Related Collections