Holybro Pixhawk 6X Piloto Automático H753 Módulo de Controlador de Vôo Base Padrão / Mini Base PM02D M9N M10 GPS RC Aviões Multirotor
Holybro Pixhawk 6X Piloto Automático H753 Módulo de Controlador de Vôo Base Padrão / Mini Base PM02D M9N M10 GPS RC Aviões Multirotor
HolyBro
Não foi possível carregar a disponibilidade de recolha
Holybro Pixhawk 6X Autopilot H753 Módulo Controlador de Voo para Drones Multirotores e Aviões
O Holybro Pixhawk 6X Autopilot H753 Flight Controller é um controlador de voo modular avançado projetado para drones multirrotores industriais e comerciais e aviões de asa fixa. Apresentando tecnologia de ponta e uma variedade de configurações, o Pixhawk 6X oferece desempenho e confiabilidade incomparáveis para aplicações exigentes.
Principais características
1. Redundância avançada e tecnologia BalancedGyro™
O Pixhawk 6X incorpora redundância tripla com três sensores ICM-45686 IMU (±32g) e dois sensores de barômetro. Esses sensores são completamente isolados e operam em barramentos separados com controle de energia separado, garantindo confiabilidade em missões críticas. A tecnologia BalancedGyro™ otimiza a precisão e a estabilidade do sensor.
2. Processador de alto desempenho
Alimentado pelo processador STM32H753 com uma velocidade de clock de até 480 MHz, o controlador de voo oferece capacidades computacionais excepcionais. Ele inclui 2 MB de memória flash e 1 MB de RAM para execução de missão sem interrupções.
3. Design modular
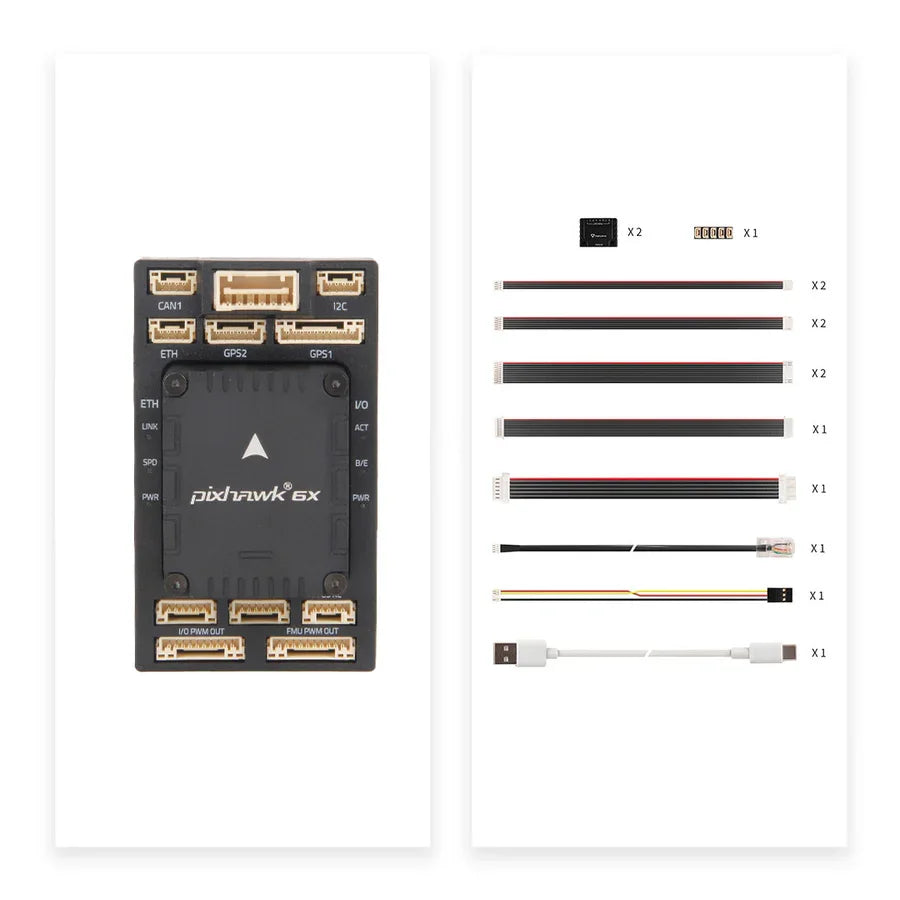
O Pixhawk 6X apresenta um design modular com sistemas IMU, FMU e Base separados. Esses componentes são interconectados por meio de um conector Pixhawk® Autopilot Bus de 100 pinos e um de 50 pinos, permitindo personalização e manutenção flexíveis.
4. Novo sistema de isolamento de vibração
Utilizando material de isolamento de vibração durável e formulado sob medida, o inovador sistema de amortecimento do Pixhawk 6X garante desempenho IMU ideal com frequências de ressonância no espectro mais alto, tornando-o ideal para aplicações industriais e comerciais.
5. Interface Ethernet
Uma interface Ethernet oferece suporte à integração de computadores de missão de alta velocidade, permitindo troca de dados perfeita para controle avançado de missão.
6. Placa IMU com temperatura controlada
A placa IMU opera dentro de uma faixa de temperatura ideal, garantindo desempenho consistente mesmo em ambientes desafiadores.
7. Ampla compatibilidade de firmware
A versão Rev 8 suporta firmware PX4 (1.14.3 ou posterior) e firmware Ardupilot (4.5.0 ou posterior). Os usuários podem atualizar o firmware via Mission Planner ou QGroundControl para atender às suas necessidades específicas.
Configurações
O Holybro Pixhawk 6X está disponível em várias configurações para atender a diversas necessidades:
-
Rodapé Padrão: Dimensões: 52,4 x 102 x 16,7 mm; Peso: 72,5 g (Alumínio)
-
Mini Rodapé: Dimensões: 43,4 x 72,8 x 14,2 mm; Peso: 26.5g
-
Módulos GPS opcionais: M9N, M10 GPS para navegação precisa
-
Módulos de energia: PM02D para fornecimento confiável de energia
Especificações
Processadores e sensores:
-
Processador FMU: STM32H753 32 Bit Arm® Cortex®-M7, 480MHz, 2MB de memória flash, 1MB de RAM
-
Processador IO: STM32F103 32 bits Arm® Cortex®-M3, 72 MHz, 64 KB SRAM
-
Sensores IMU: 3x ICM-45686 com tecnologia BalancedGyro™
-
Barômetros: ICP20100 e BMP388
-
Magnetômetro: BMM150
-
Elemento Seguro: Hardware Plug & Trust NXP EdgeLock SE050
Dados elétricos:
-
Classificações de voltagem:
-
Tensão máxima de entrada: 6V
-
Entrada de energia USB: 4,75~5,25 V
-
Entrada do trilho servo: 0~36V
-
-
Classificações atuais:
-
Limitador de corrente de saída Telem1: 1,5A
-
Limitador de corrente de saída combinado de todas as outras portas: 1,5 A
-
-
Tensão do sinal PWM: Padrão 3,3 V (ajustável para 5 V com modificação do resistor integrado)
Dados mecânicos:
-
Dimensões do módulo controlador de voo: 38,8 x 31,8 x 16,8 mm; Peso: 31,3 g
-
Opções de rodapé:
-
Rodapé padrão: 52,4 x 102 x 16,7 mm; Peso: 72,5 g
-
Mini Rodapé: 43,4 x 72,8 x 14,2 mm; Peso: 26,5 g
-
Aplicações
O Holybro Pixhawk 6X foi projetado para:
-
Drones multirrotores industriais e comerciais
-
Navegação de aeronaves de asa fixa
-
Controle de missão avançado com integração de dados de alta velocidade
Quer você esteja construindo um multirrotor personalizado ou aprimorando um sistema de asa fixa, o Holybro Pixhawk 6X Autopilot oferece uma solução versátil, robusta e confiável. Seu design modular, tecnologia avançada e múltiplas opções de configuração garantem que ele atenda às necessidades de qualquer aplicação profissional.
Related Collections