Holybro Pixhawk 6X (ICM-45686) Controlador de Voo – IMU Tripla Redundante, STM32H753, Ethernet, Compatível com PX4 & ArduPilot
Holybro Pixhawk 6X (ICM-45686) Controlador de Voo – IMU Tripla Redundante, STM32H753, Ethernet, Compatível com PX4 & ArduPilot
HolyBro
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Holybro Pixhawk 6X (ICM-45686) é um controlador de voo de piloto automático modular de alto desempenho, projetado para aplicações de drones industriais e comerciais exigentes. Com IMUs ICM-45686 com tripla redundância, tecnologia BalancedGyro™, barômetros duplos e um processador STM32H753 operando a 480 MHz, o Pixhawk 6X oferece uma confiabilidade inigualável, desempenho em tempo real e flexibilidade. Sua arquitetura modular, avançada isolação de vibrações e interface Ethernet tornam-no ideal para sistemas UAV que requerem controle robusto, precisão e adaptabilidade em missões.
Características Principais
-
Redundância Tripla de IMU: 3x ICM-45686 IMUs (±32g) com tecnologia BalancedGyro™ para navegação inercial tolerante a falhas
-
Barómetros Duplos: ICP20100 e BMP388 para maior precisão de altitude
-
Processador de Alta Velocidade: STM32H753 Cortex-M7, 480MHz, com 2MB Flash & 1MB RAM
-
Design Modular: Separa FMU, IMU e placa base, conectados via barramento Pixhawk® de 100 pinos & 50 pinos
-
Placa IMU Controlada por Temperatura: Garante desempenho ótimo do sensor em diferentes faixas de temperatura
-
Integração Ethernet: Suporta comunicação de alta velocidade com computadores de missão
-
Suporte a Módulo de Potência Digital: Fornece medições de tensão e corrente mais precisas
Sistema de Isolamento Avançado: Material durável e formulado sob medida proporciona amortecimento de vibrações de alta frequência
-
Compatibilidade de Firmware: Enviado com PX4 (v1.14.3+), suporta ArduPilot (v4.5.0+)
Especificações
Processadores & Sensores
| Componente | Detalhes |
|---|---|
| Processador FMU | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| Processador IO | STM32F103, ARM Cortex-M3, 72MHz |
| Sensores IMU | 3x ICM-45686 (BalancedGyro™) |
| Barómetro | ICP20100 & BMP388 |
| Magnetómetro | BMM150 |
| Elemento Seguro | NXP SE050 Plug & Trust |
Parâmetros Elétricos
| Parâmetro | Value |
|---|---|
| Máxima Tensão de Entrada | 6V |
| Entrada de Alimentação USB | 4.75~5.25V |
| Tensão do Servomotor | 0~36V |
| Limite de Corrente Telem1 & GPS2 | 1.5A combinado |
| Limite de Corrente de Outros Portos | 1.5A combinado |
| Tensão do Sinal PWM | Default 3.3V (comutável para 5V via resistor) |
| Temperatura de Operação | -25°C a +85°C |
Dimensões Mecânicas & Peso
| Componente | Dimensões (mm) | Peso (g) |
|---|---|---|
| Controlador de Voo | 38.8 x 31.8 x 16.8 | 31.3g |
| Placa Base Padrão | 52.4 x 102 x 16.7 | 72.5g |
| Baseboard Mini | 43.4 x 72.8 x 14.2 | 26.5g |
Compatibilidade de Firmware
-
PX4: Totalmente suportado a partir da versão 1.14.3 e superior
-
ArduPilot: Totalmente suportado a partir da versão 4.5.0 e acima
-
A atualização de firmware é suportada através do Mission Planner ou QGroundControl
Aplicações
Ideal para integração em:
-
Drones industriais
-
Sistemas UAV comerciais
-
Aviões VTOL
-
Plataformas de pesquisa académica
-
Missões multi-sensor e de alta fiabilidade
Detalhes

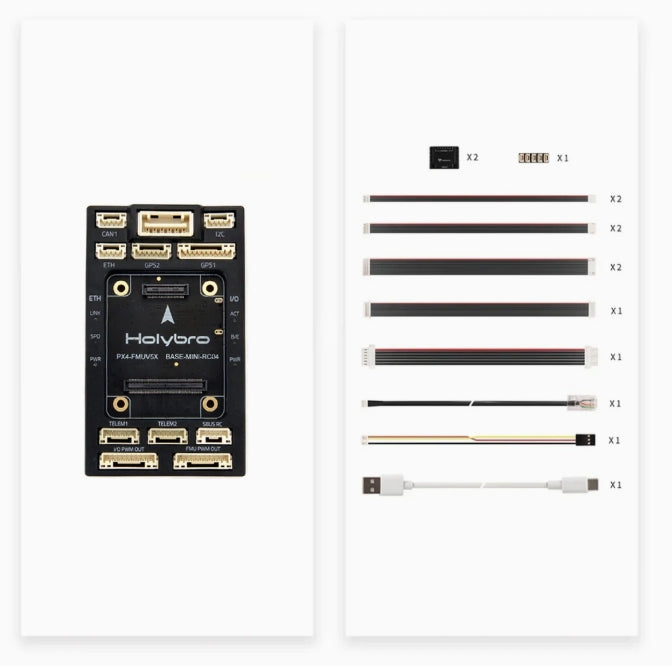
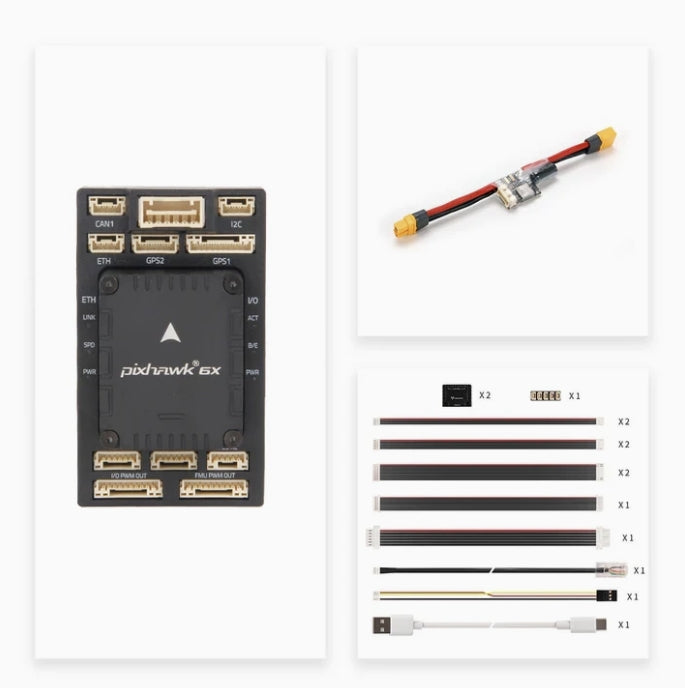
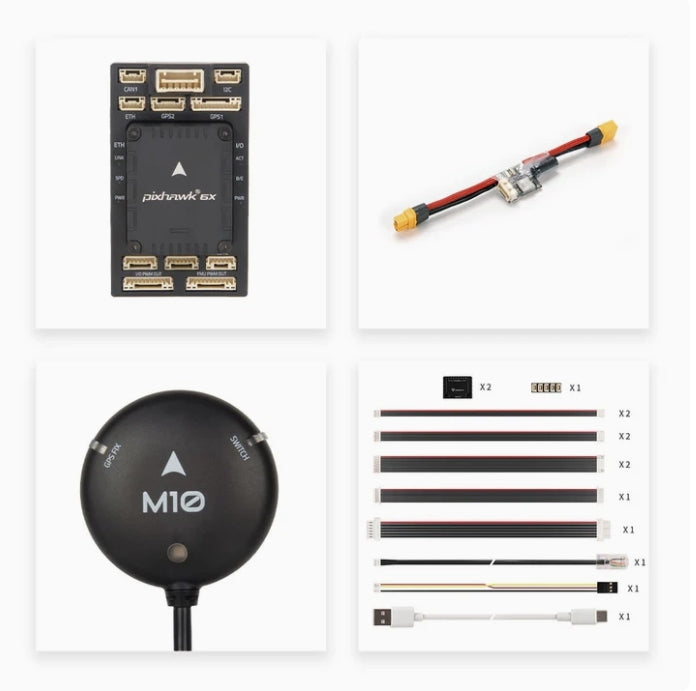
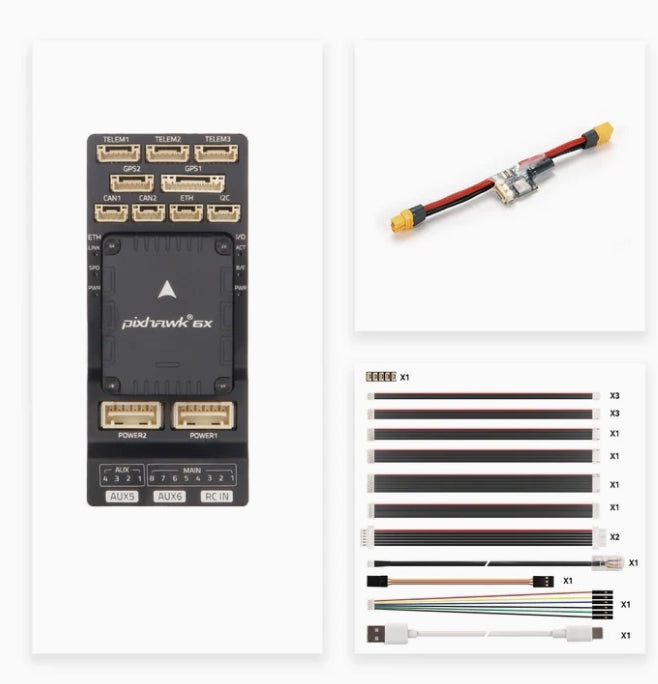
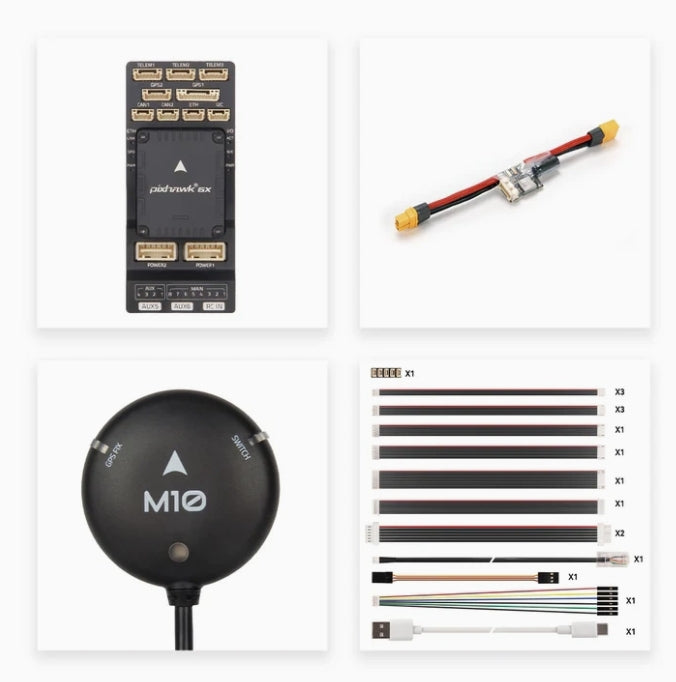
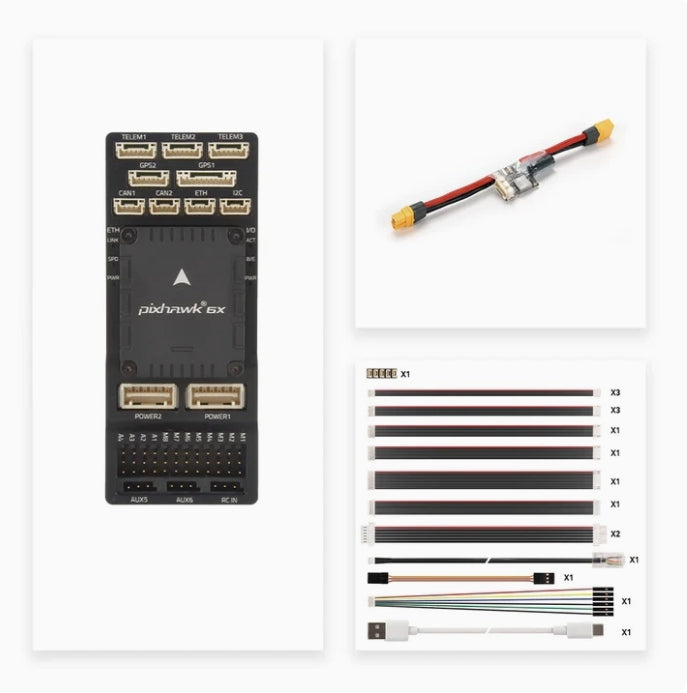
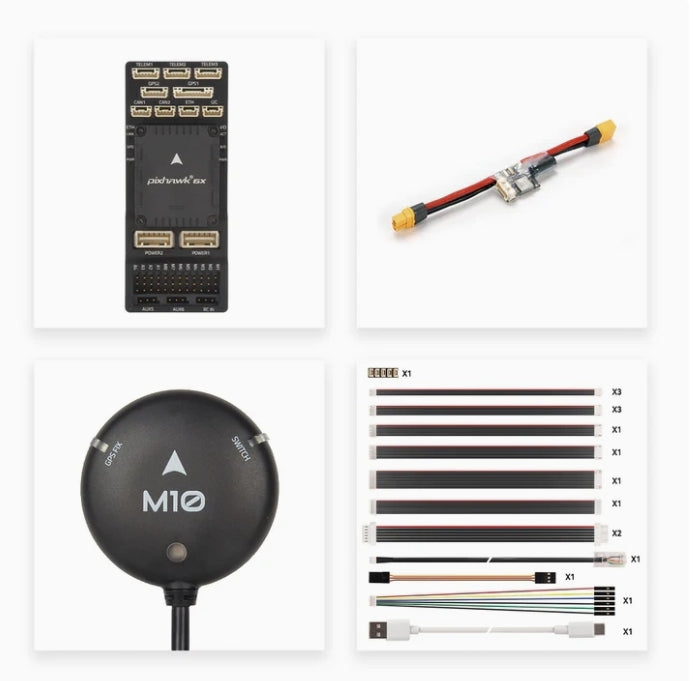
O Pixhawk 6X oferece um design mais fino com dois modelos. Apresenta um cabeçote de pinos melhorado para uma melhor conectividade e desempenho, tornando-o ideal para aplicações avançadas. Escolha o modelo certo para as suas necessidades.
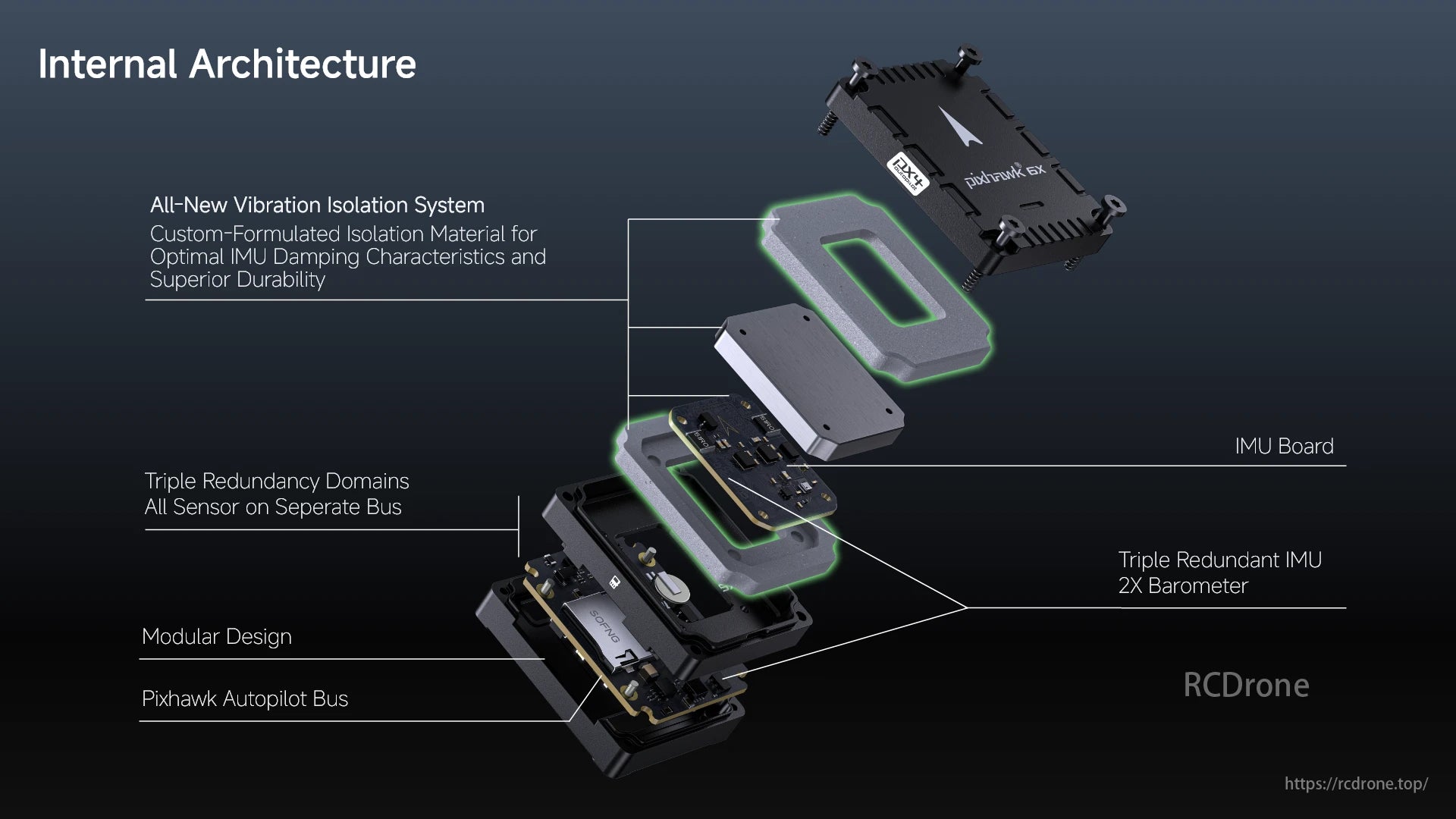
A Holybro Pixhawk 6X oferece isolamento de vibrações, tripla redundância, design modular, barramento de piloto automático, placa IMU e 2x barômetros para desempenho avançado.
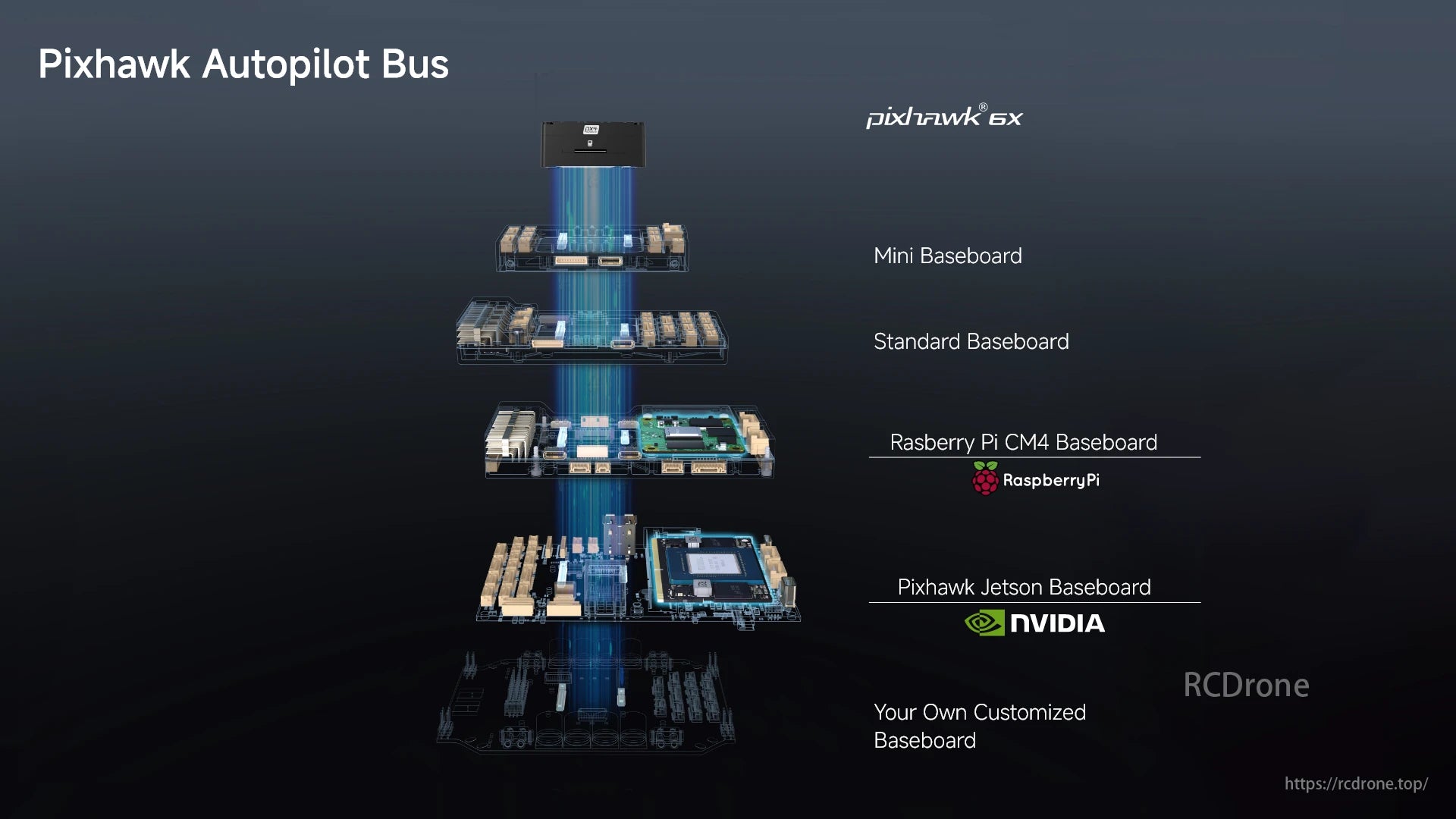
Pixhawk O Barramento de Piloto Automático inclui Pixhawk 6X, Mini Baseboard, Baseboard Padrão, Baseboard Raspberry Pi CM4, Baseboard Jetson e opções personalizadas.

Resistores de compensação de temperatura, IMU e barômetro redundantes, diversas tecnologias de sensores e material de isolamento garantem precisão.

O Barramento de Piloto Automático Pixhawk, Processador STM H753 de 32 bits (480 MHz), Invensense ICM45686 IMU com Tecnologia BalancedGyro e NXP EdgeLock SE050 Elemento Seguro estão integrados na Placa FMU.
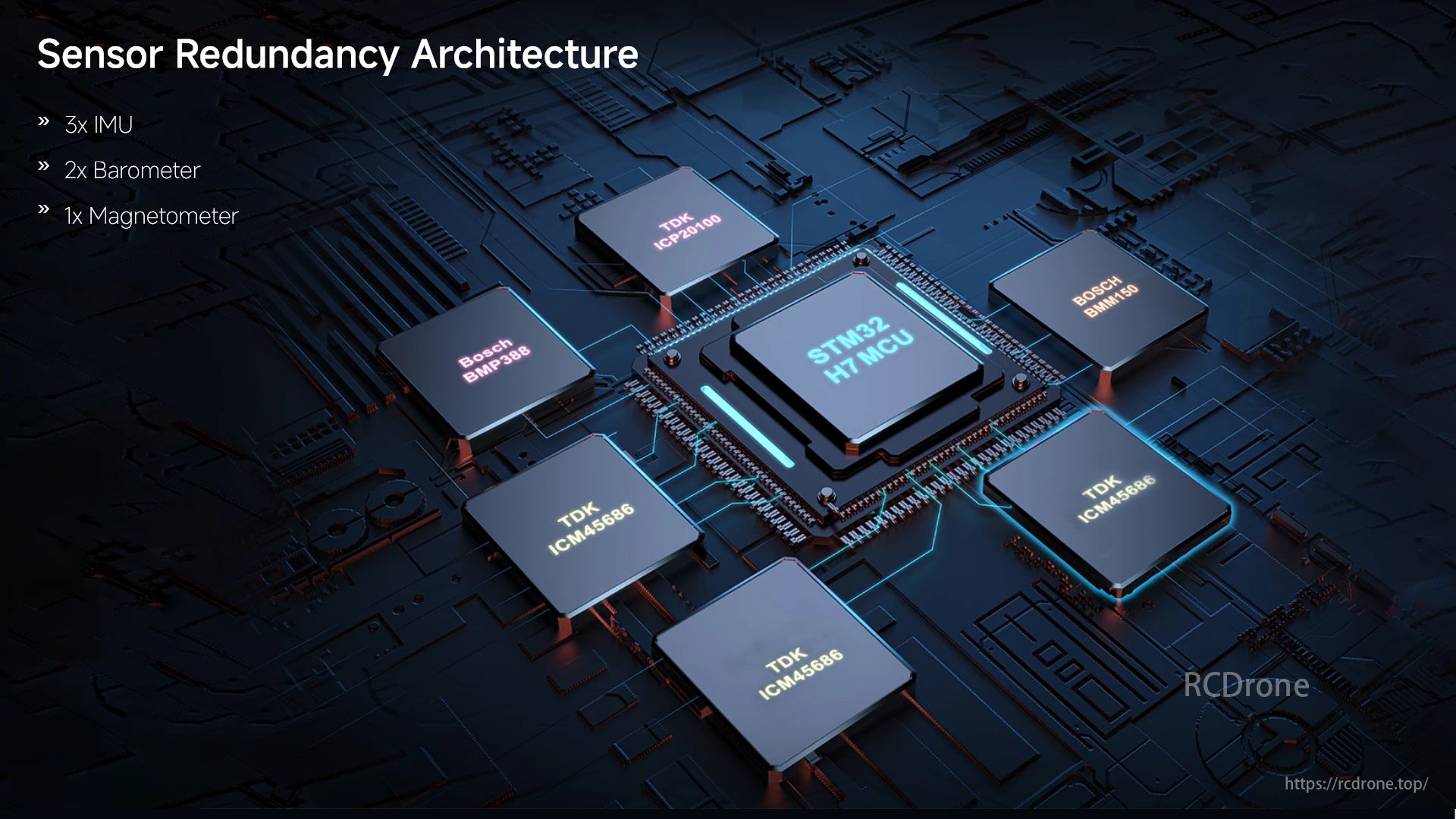
Arquitetura de redundância de sensores com 3x IMU, 2x barômetros e 1x magnetômetro.Características do MCU STM32 H7, sensores TDK ICM-45686, Bosch BMP388 e BMM50 para um desempenho aprimorado.
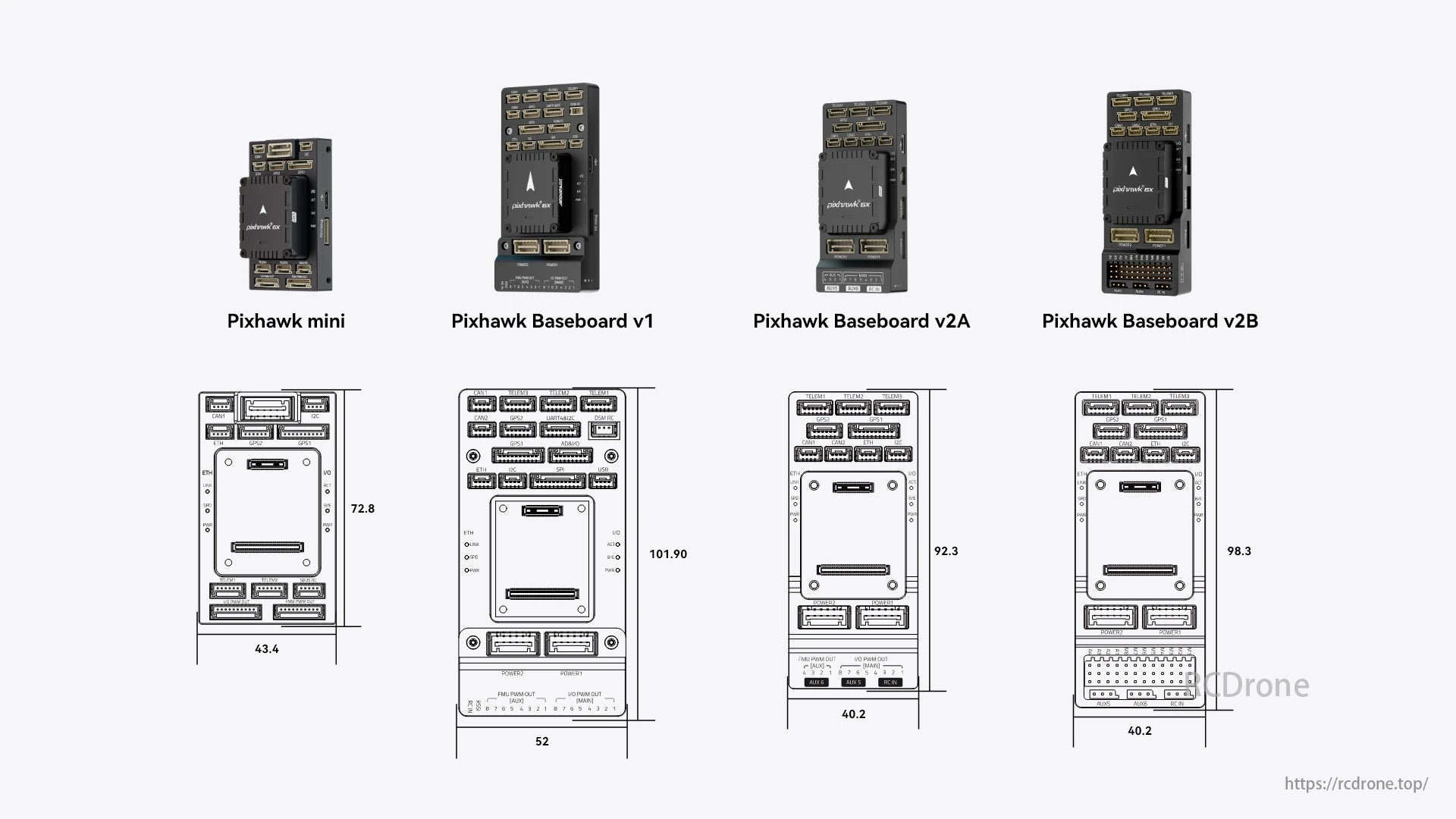
Controladores de voo Pixhawk mini, Baseboard v1, v2A e v2B com dimensões: 43.4x72.8, 52x101.90, 40.2x92.3 e 40.2x98.3, respetivamente. Vários portas e conectores são visíveis em cada modelo.
Related Collections