Controlador de vôo do piloto automático Holybro Pixhawk 6X Pro
Controlador de vôo do piloto automático Holybro Pixhawk 6X Pro
HolyBro
Não foi possível carregar a disponibilidade de recolha
Ponto-chave do design
- IMU industrial ADIS16470 de alto desempenho com alta faixa dinâmica do acelerômetro (±40 g), perfeito para detecção precisa de movimento em aplicações UAV exigentes
- Novo material avançado e durável de isolamento de vibração com frequência de ressonância no espectro mais alto, ideal para aplicações de drones industriais e comerciais
- IMU tripla redundante e barômetro duplamente redundante em barramentos separados
- Processador STM32H753 de alto desempenho
- Controlador de voo modular: IMU, FMU e sistema base separados
- O design orientado à segurança incorpora sensores de diferentes fabricantes e linhas de modelos
- LDO independente alimenta cada sensor com controle de energia independente.
- Interface Ethernet para integração de computadores de missão de alta velocidade. A ausência de transformador pode ser alcançada usando resistores de terminação de 50 Ohm no dispositivo alvo (AN2190 terminação de 50 Ohm).
- Placa IMU com temperatura controlada, permitindo temperatura de trabalho ideal das IMUs
- Modo de sinal de 3,3 V ou 5 V comutável por hardware (requer modificação da placa base)
Observação:
- Módulo FC + rodapé são necessários para que este produto funcione. Um módulo FC ou uma placa de base por si só não funcionarão.
Especificação
Processadores e Sensores
- Processador FMU: STM32H753
- Arm® Cortex®-M7 de 32 bits, 480 MHz, memória flash de 2 MB, RAM de 1 MB
- Processador IO: STM32F103
- 32 bits Arm® Cortex®-M3, 72 MHz, 64 KB SRAM
- Sensores de bordo
- Acel/Giroscópio: ADIS16470
- ±40g, IMU industrial com isolamento de vibração
- Aceleração/Giroscópio: IIM-42652
- ±16g, IMU industrial com isolamento de vibração
- Aceleração/Giroscópio: ICM-45686 com tecnologia BalancedGyro™
- ±32g, montado rigidamente
- Barômetro: ICP20100
- Barômetro: BMP388
- Revista: BMM150
- Acel/Giroscópio: ADIS16470
- NXP Elemento de segurança de hardware EdgeLock SE050 Plug & Trust
Dados elétricos
- Classificações de voltagem:
- Tensão máxima de entrada: 6V
- Entrada de energia USB: 4,75~5,25 V
- Entrada do trilho servo: 0~36V
- Classificações atuais:
- Limitador de corrente de saída Telem1: 1,5A
- Limitador de corrente de saída combinado de todas as outras portas: 1,5 A
- Temperatura de operação: -25-85°C
Dados mecânicos
- Dimensões
- Módulo do controlador de voo: 38,8 x 31,8 x 30,1 mm
- Rodapé padrão: 52,4 x 102 x 16,7 mm (Alumínio)
- Mini rodapé: 43,4 x 72,8 x 14,2 mm
- Peso
- Módulo Controlador de Voo: 50g
- Rodapé padrão: 72,5g (Alumínio)
- Mini Rodapé: 26.5g
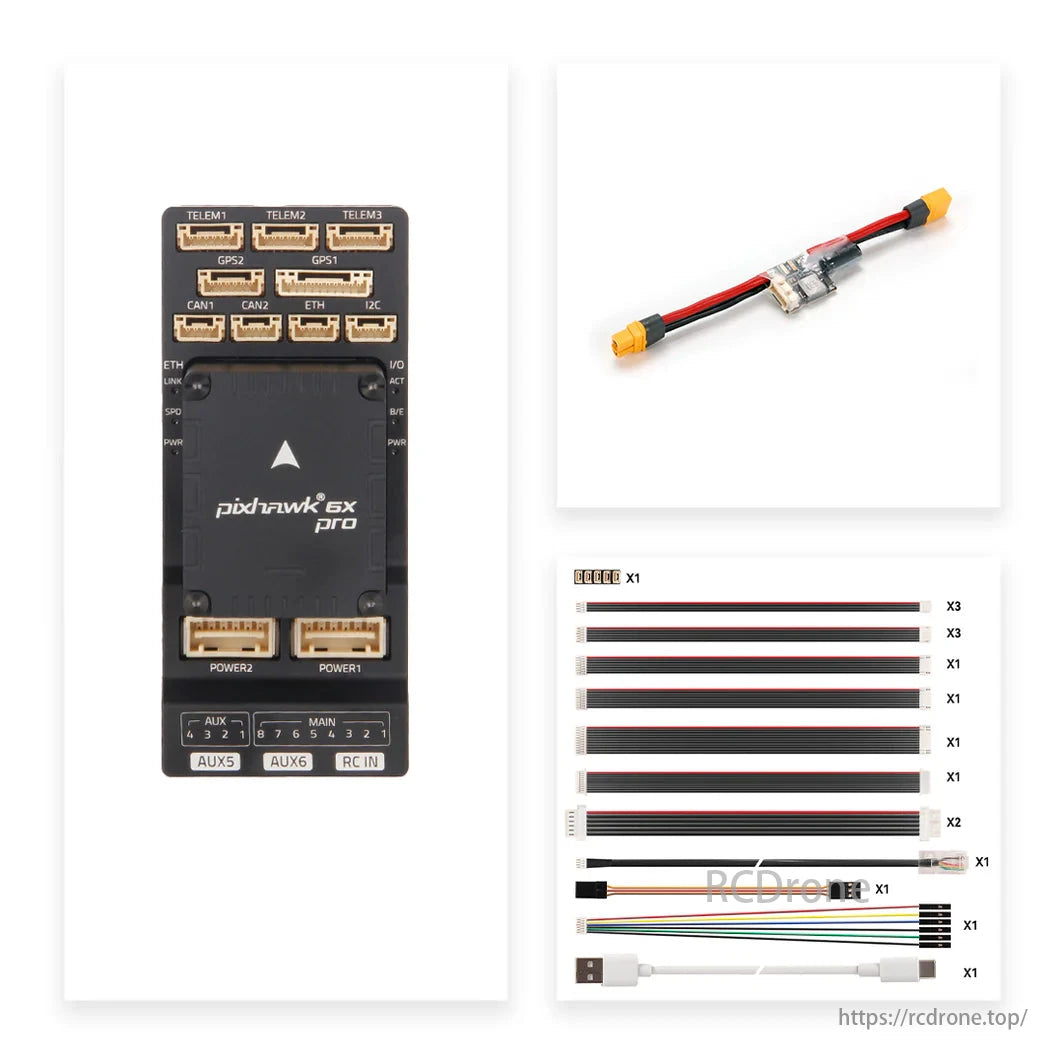
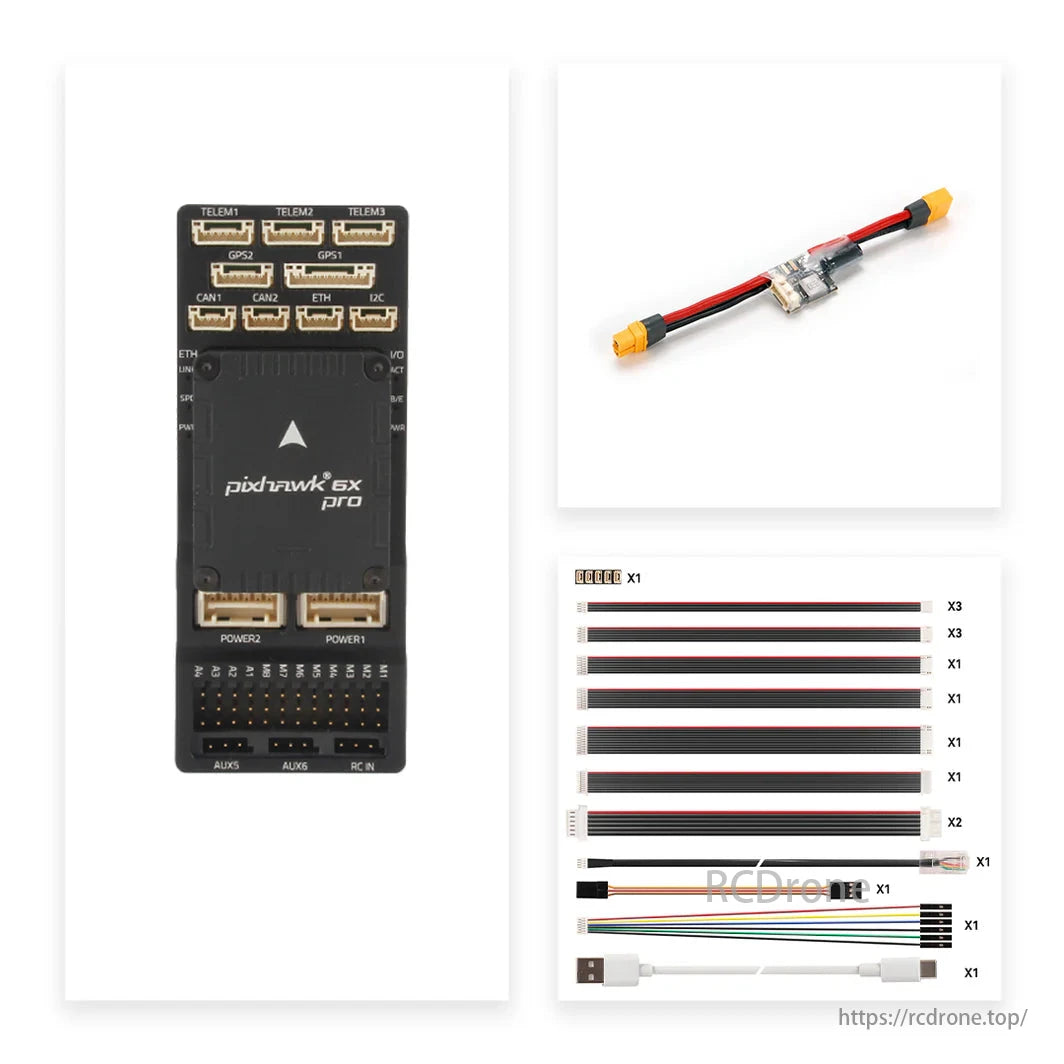
O pacote inclui
O módulo FC inclui apenas:
- Pixhawk Módulo controlador de voo 6X Pro
- Substituição opcional de amortecimento IMU (mais macio do que o pré-instalado)
O conjunto padrão V2A/V2B/Mini inclui:
- Módulo controlador de voo Pixhawk 6X Pro
- Rodapé padrão Pixhawk v2A/ Rodapé padrão Pixhawk v2B/ Mini Rodapé
- Módulo de potência PM02D HV
- Conjunto de cabos
Detalhes
Novo design de isolamento de vibração
Este novo projeto de isolamento de vibração usa corrente alternadamaterial de isolamento à base de silicone durável formulado sob medida no lugar do design de espuma tradicional.BApoiado por extensa P&D e testes, ele oferece características de amortecimento IMU ideais com frequência de ressonância no espectro mais alto, perfeito para drones industriais e comerciais
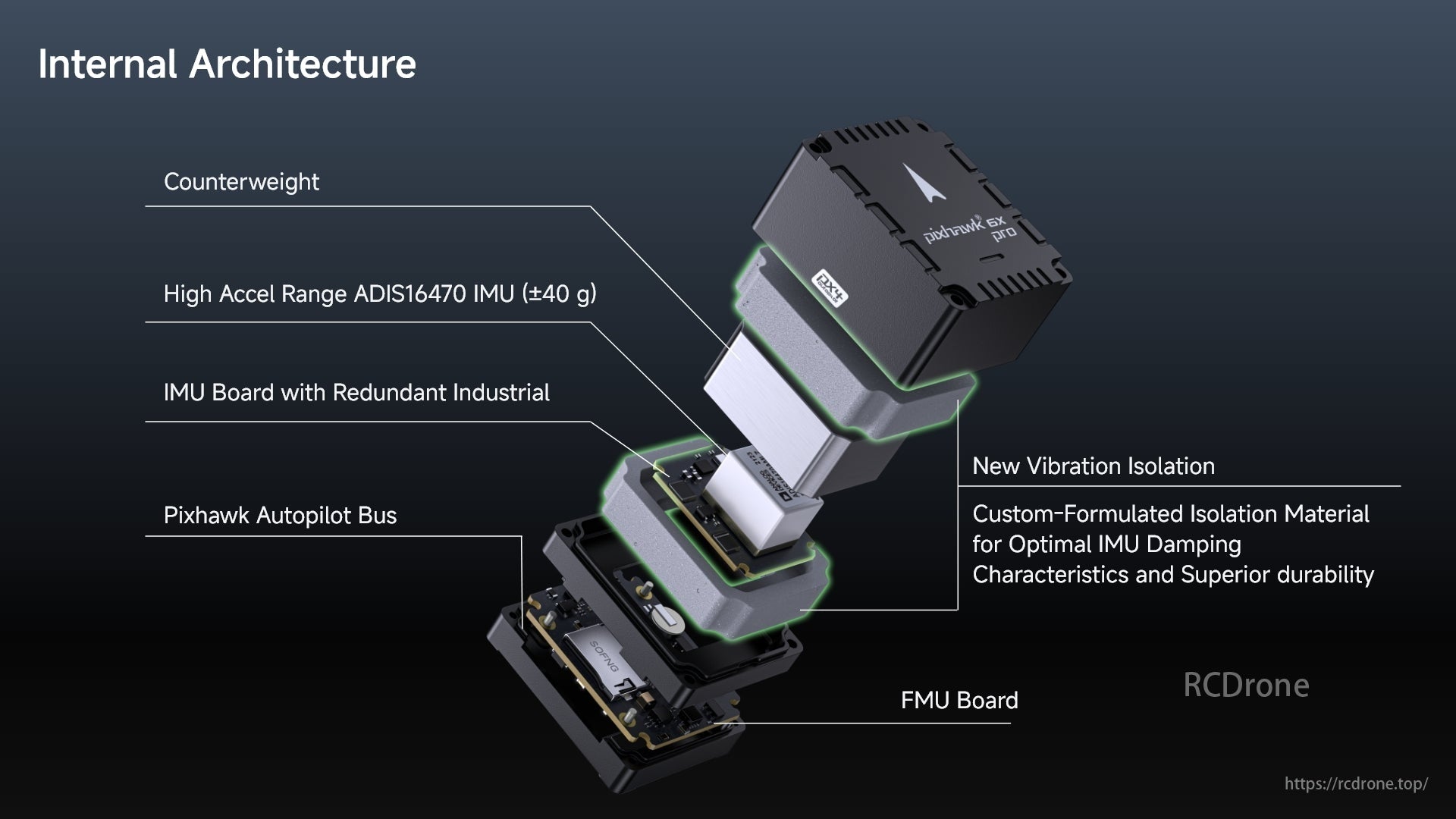
Arquitetura interna: contrapeso, IMU ADIS16470 de alta faixa de aceleração (±40 g), placa IMU industrial redundante, barramento de piloto automático Pixhawk, novo isolamento de vibração, placa FMU.
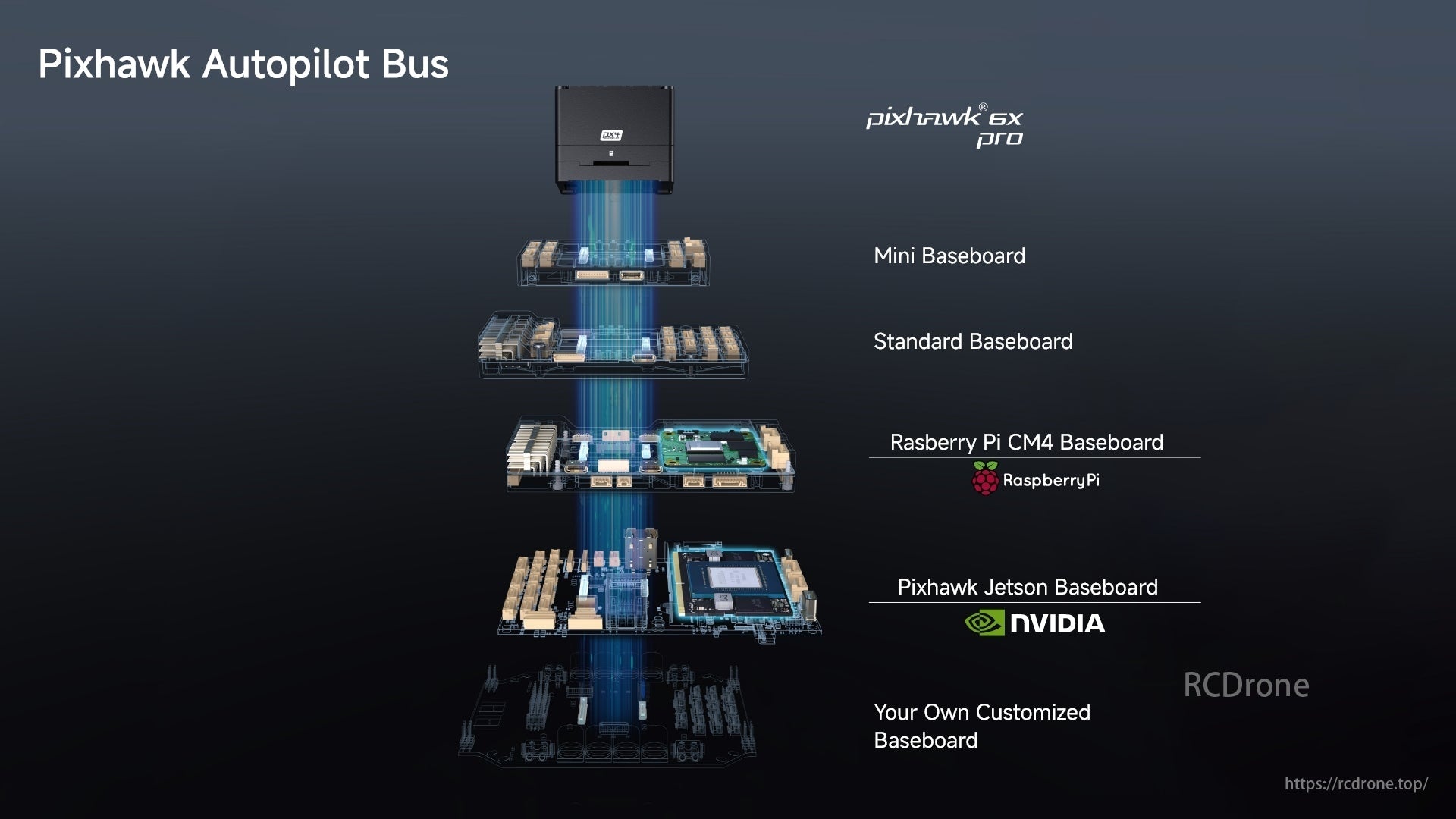
O Pixhawk Autopilot Bus conecta rodapés Mini, Standard, Raspberry Pi CM4, Jetson e rodapés personalizados.
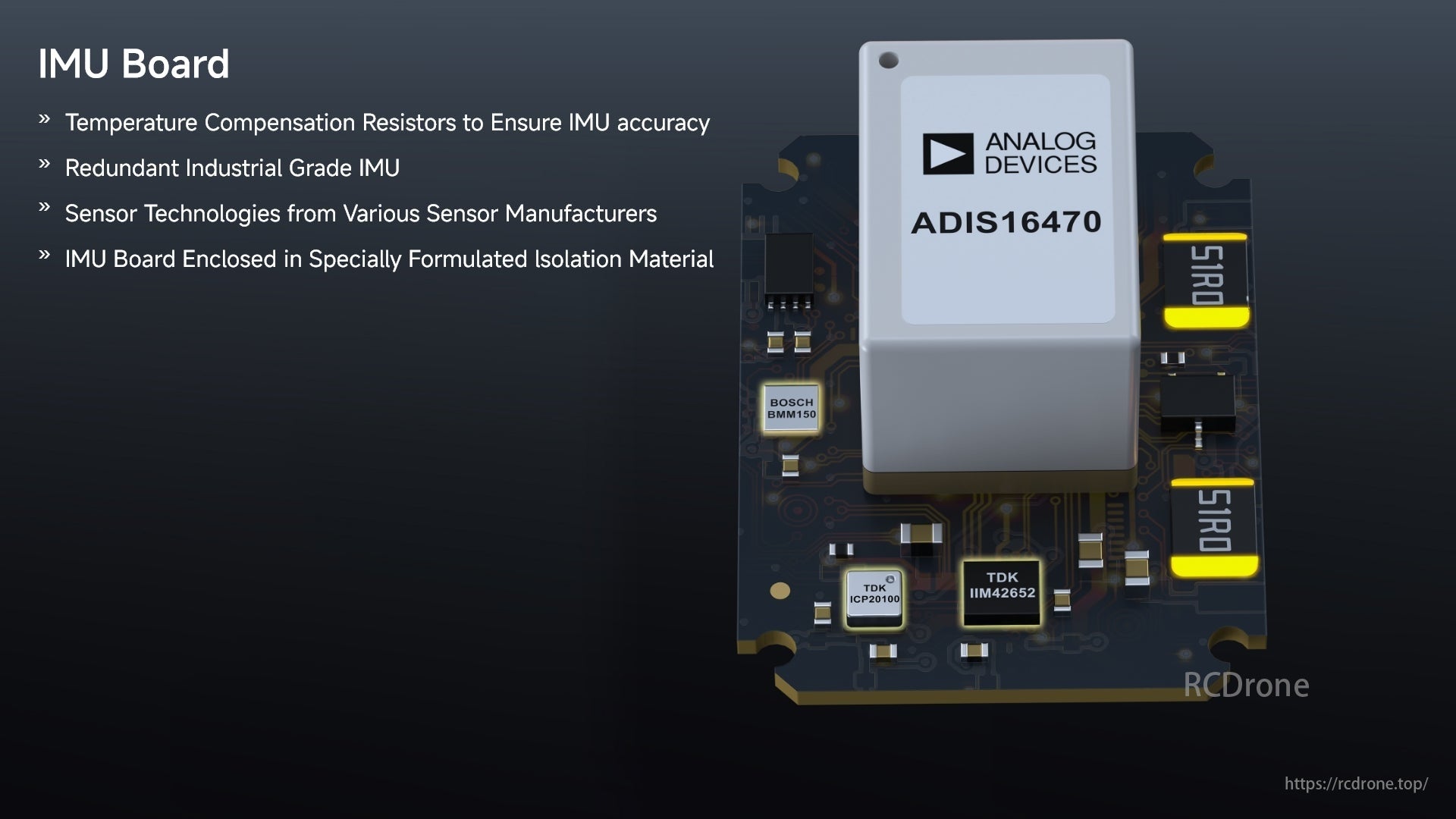
A placa IMU possui resistores de compensação de temperatura, IMU redundante de nível industrial, sensores de vários fabricantes e é envolvida em material isolante.
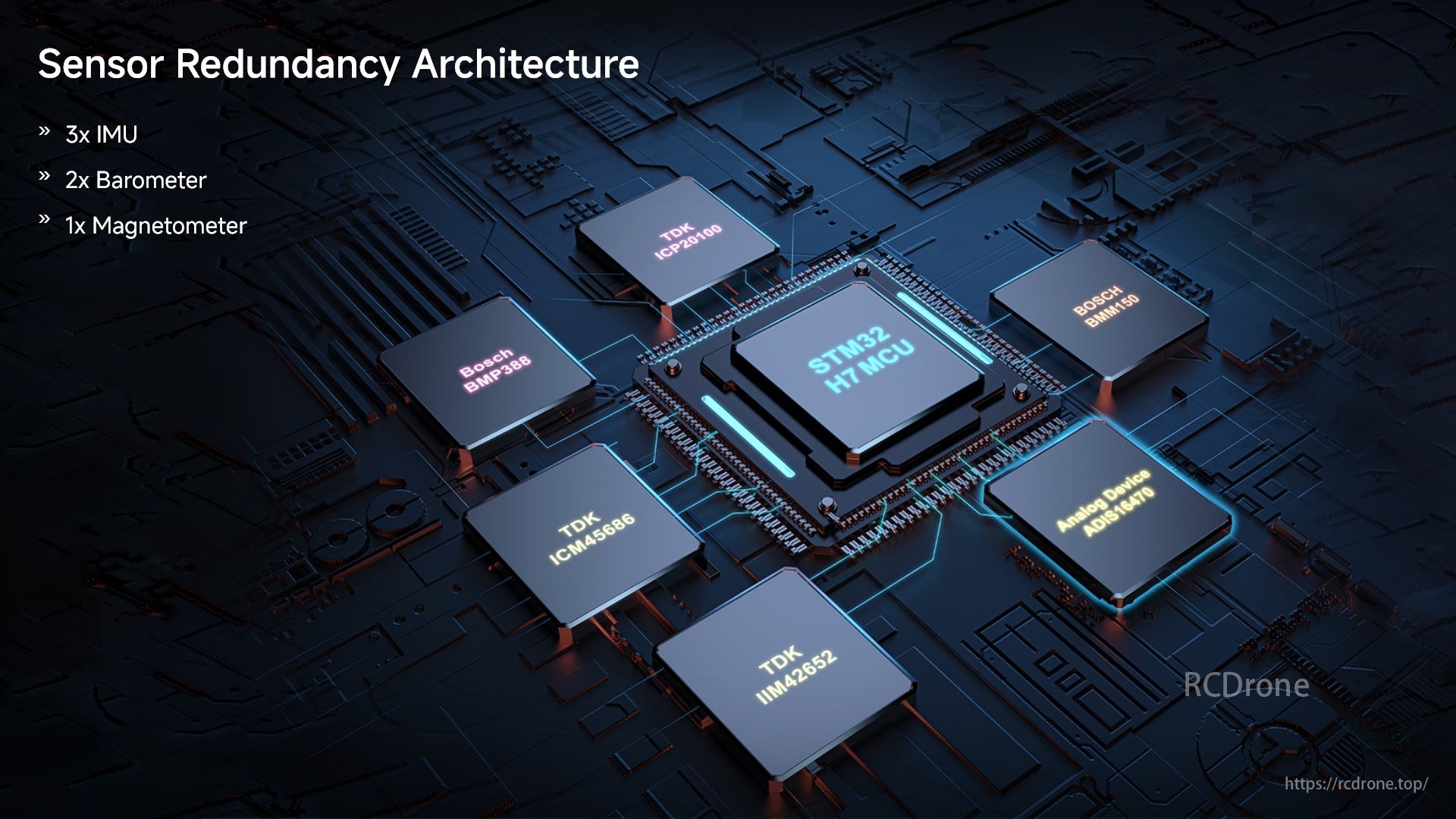
A arquitetura de redundância de sensores inclui 3 IMU, 2 barômetros e 1 magnetômetro, apresentando componentes como STM32 H7 MCU, TDK ICs, Bosch BMP388 e Analog Devices ADIS16470.
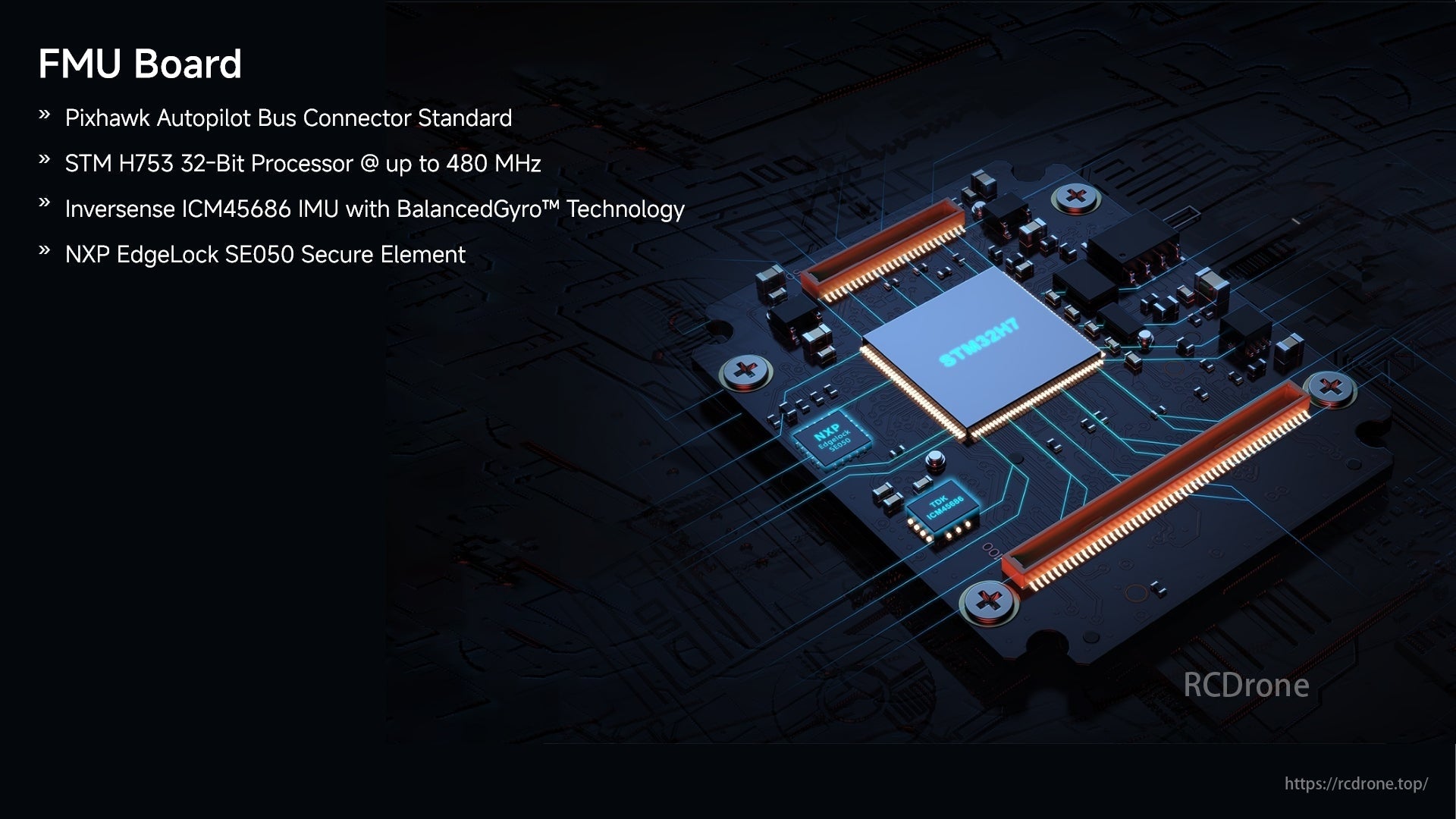
A placa FMU possui conector de barramento de piloto automático Pixhawk padrão, processador STM H753 de 32 bits de até 480 MHz, IMU Inversense ICM45686 com tecnologia BalancedGyro e elemento de segurança NXP EdgeLock SE050.
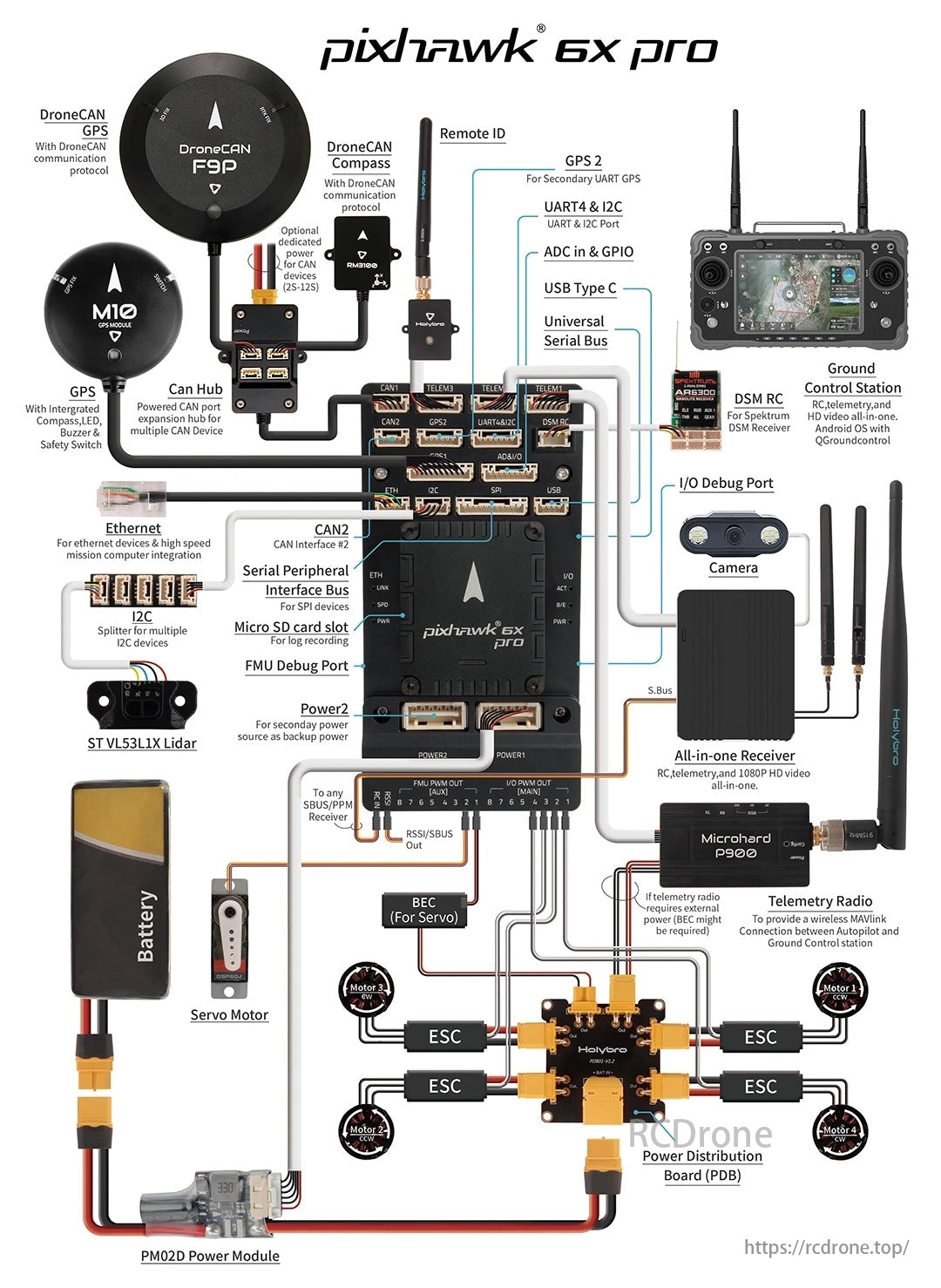
O diagrama do Pixhawk 6X Pro ilustra as conexões para o sistema de piloto automático de um drone, incluindo módulos GPS, bússola, estação de controle de solo, câmera, rádio de telemetria, ESCs, motores e quadro de distribuição de energia. Várias interfaces como CAN, I2C, UART e USB são usadas para comunicação entre componentes.
Related Collections