Holybro Pixhawk 6X-RT - (Edição para desenvolvedores) Controlador de voo de piloto automático padrão/Mini conjunto
Holybro Pixhawk 6X-RT - (Edição para desenvolvedores) Controlador de voo de piloto automático padrão/Mini conjunto
HolyBro
Não foi possível carregar a disponibilidade de recolha
Visão geral
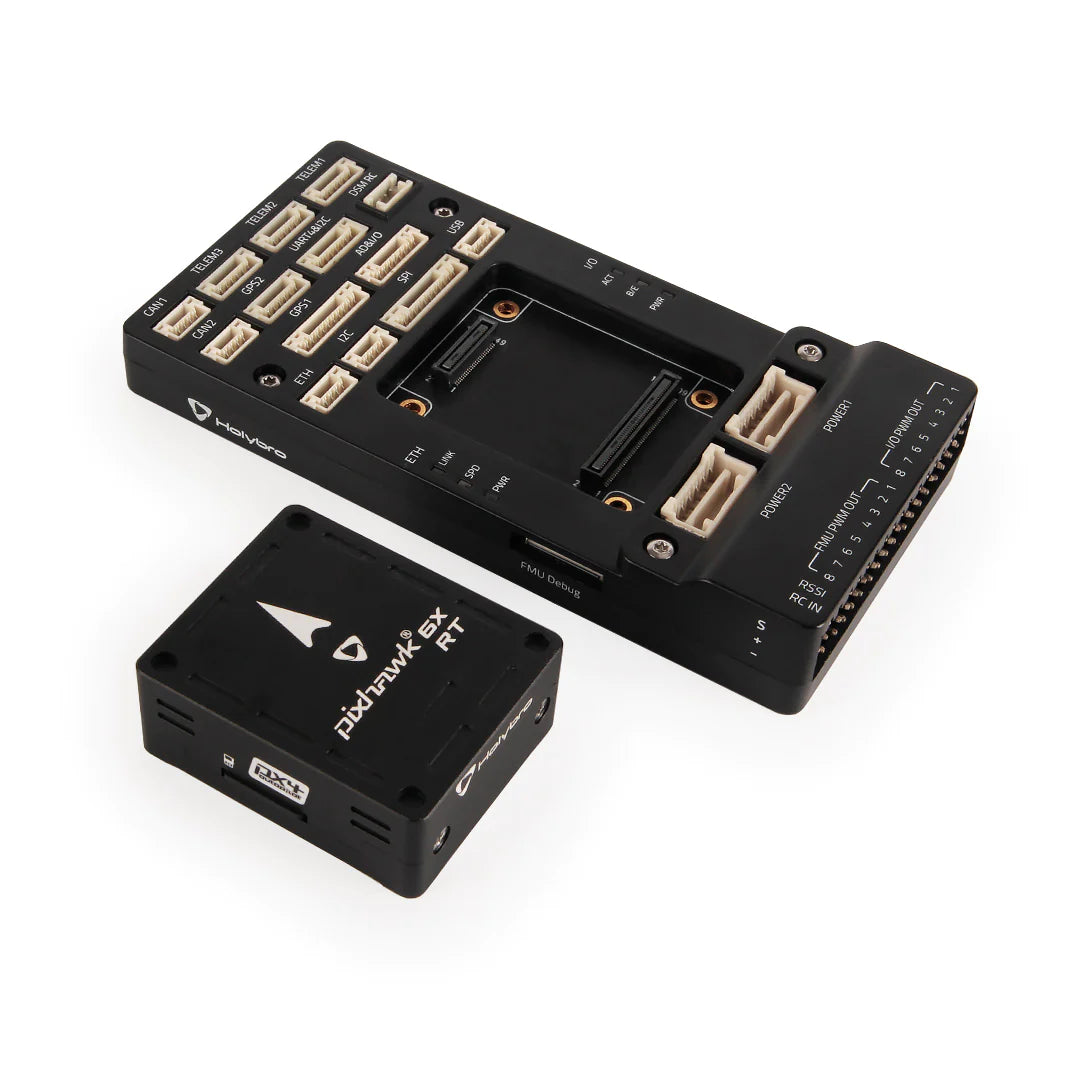
O Pixhawk 6X-RT é baseado no padrão aberto Pixhawk® FMUv6X-RT e no padrão de barramento de piloto automático Pixhawk®. Ele vem com PX4 Autopilot® pré-instalado. Dentro do controlador de vôo Pixhawk 6X-RT, você pode encontrar um controlador de vôo i.MXRT1176 MCU, combinado com tecnologia de sensores da Bosch® e InvenSense®, proporcionando flexibilidade e confiabilidade para controlar qualquer veículo autônomo.
O eu.O microcontrolador MXRT1176 contém um Arm® Cortex-M7 a 1 GHz e um Cortex-M4 a 400 MHz. Possui 2 MB de SRAM e 64 MB de flash SPI octal. Graças ao poder de processamento atualizado, os desenvolvedores podem ser mais produtivos e eficientes em seu trabalho de desenvolvimento, permitindo algoritmos e modelos complexos.
Inclui IMUs de alto desempenho e baixo ruído projetadas para melhor estabilização e possui IMUs triplamente redundantes e barômetros redundantes duplos em barramentos separados. Quando o piloto automático detecta uma falha no sensor, o sistema muda perfeitamente para outro para manter a confiabilidade do controle de voo. Um LDO independente alimenta cada conjunto de sensores com controle de potência independente. Um sistema de isolamento de vibração para filtrar vibrações de alta frequência e reduzir o ruído para garantir leituras precisas, permitindo que os veículos alcancem melhores desempenhos gerais de voo. Agora é possível uma comunicação Microchip Ethernet PHY integrada de alta velocidade com computadores de missão via Ethernet.
O Pixhawk 6X-RT é perfeito para desenvolvedores em laboratórios de pesquisa corporativos, startups, acadêmicos (pesquisadores, professores, estudantes) e aplicações comerciais. Este controlador de voo é compatível com qualquer rodapé que use o barramento Pixhawk Autopilot, como o Pixhawk Baseboard, Pixhawk Mini Baseboard e Pixhawk RPi CM4 Baseboard.
Principais pontos do projeto
- Dual core de alto desempenho i.Processador MXRT1176 com Cortex-M7 a 1 GHz – Cortex-M4 a 400 MHz
- Controlador de vôo modular: IMU, FMU e sistema Base separados conectados por um conector Pixhawk® Autopilot Bus de 100 pinos e 50 pinos.
- Redundância: 3 sensores IMU e 2 sensores barômetro em barramentos separados
- Domínios de redundância tripla: domínios de sensores completamente isolados com barramentos separados e controle de energia separados
- Sistema de isolamento de vibração para filtrar vibrações de alta frequência e reduzir ruído para garantir leituras precisas
- Interface Ethernet para integração de computadores de missão em alta velocidade
- As IMUs têm temperatura controlada por resistores de aquecimento integrados, permitindo a temperatura ideal de trabalho das IMUs
- Elemento seguro de hardware NXP EdgeLock SE051 uma extensão da amplamente confiável EdgeLock SE050 Plug & Trust família de elementos seguros, suporta atualizações de miniaplicativos em campo e fornece segurança comprovada certificada para CC EAL 6+, com AVA_VAN.5 até o nível do sistema operacional, para proteção robusta contra os cenários de ataque mais recentes. Eg para armazenar com segurança o ID do operador
Observação:
- Esta edição para desenvolvedores é para os primeiros usuários, enquanto continuamos acumulando horas de testes de voo
- Este Flight Controller é atualmente compatível apenas com PX4 Flight Stack. (Alvo de firmware: FMUv6xrt). Não é compatível com Ardupilot.
- Este controlador de vôo usa módulo de alimentação digital (igual ao Pixhawk 6X, a lista completa pode ser encontrada aqui) Tabela de comparação do módulo de alimentação
Especificação
-
MCU: eu.MXRT1176
-
Córtex-M7 @ 1GHz
-
Cortex-M4 a 400 MHz
-
2 MB de memória RAM
-
Flash SPI octal de 64 MB
-
Processador IO: STM32F103
-
Arm® Cortex®-M3 de 32 bits, 72MHz, 64KB SRAM
-
Sensores integrados
-
Aceleração/Giroscópio: IMC088
-
Aceleração/Giroscópio: ICM-42670-P
-
Aceleração/Giroscópio: ICM-42686-P
-
Mag: BMM150
-
Barômetro: 2x BMP388
- Elemento seguro de hardware
- NXP EdgeLock SE051C2
- Interface SDHC
- PWM de 12 canais
- 8xUART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- Ethernet RMII 100M
- USB
- Ativação de software de código aberto
- Piloto automático PX4
- NuttX RTOS
- Zephyr RTOS
Conjunto padrão SKU20257/ Miniconjunto SKU258 Inclui:
-
Módulo controlador de voo Pixhawk 6X-RT
-
Base padrão Pixhawk/Base Mini Pixhawk
- Módulo de alimentação de alta tensão PM02D
-
Conjunto de cabos
Link de referência:
- Instrução de atualização de firmware (Github)
- PX4 no MCU NXP IMXRT1176 de 1 GHz - Slides de apresentação da NXP
- eu.MX RT1176 – página do produto MCU crossover de 1 GHz com núcleos Arm® Cortex®
- EdgeLock® SE051: solução de segurança IoT comprovada e fácil de usar, com suporte para capacidade de atualização e miniaplicativos personalizados
Related Collections