Pacote de rodapé Holybro Pixhawk Jetson com 6X / 6X Pro e NVIDIA Jetson
Pacote de rodapé Holybro Pixhawk Jetson com 6X / 6X Pro e NVIDIA Jetson
HolyBro
Não foi possível carregar a disponibilidade de recolha
Visão geral
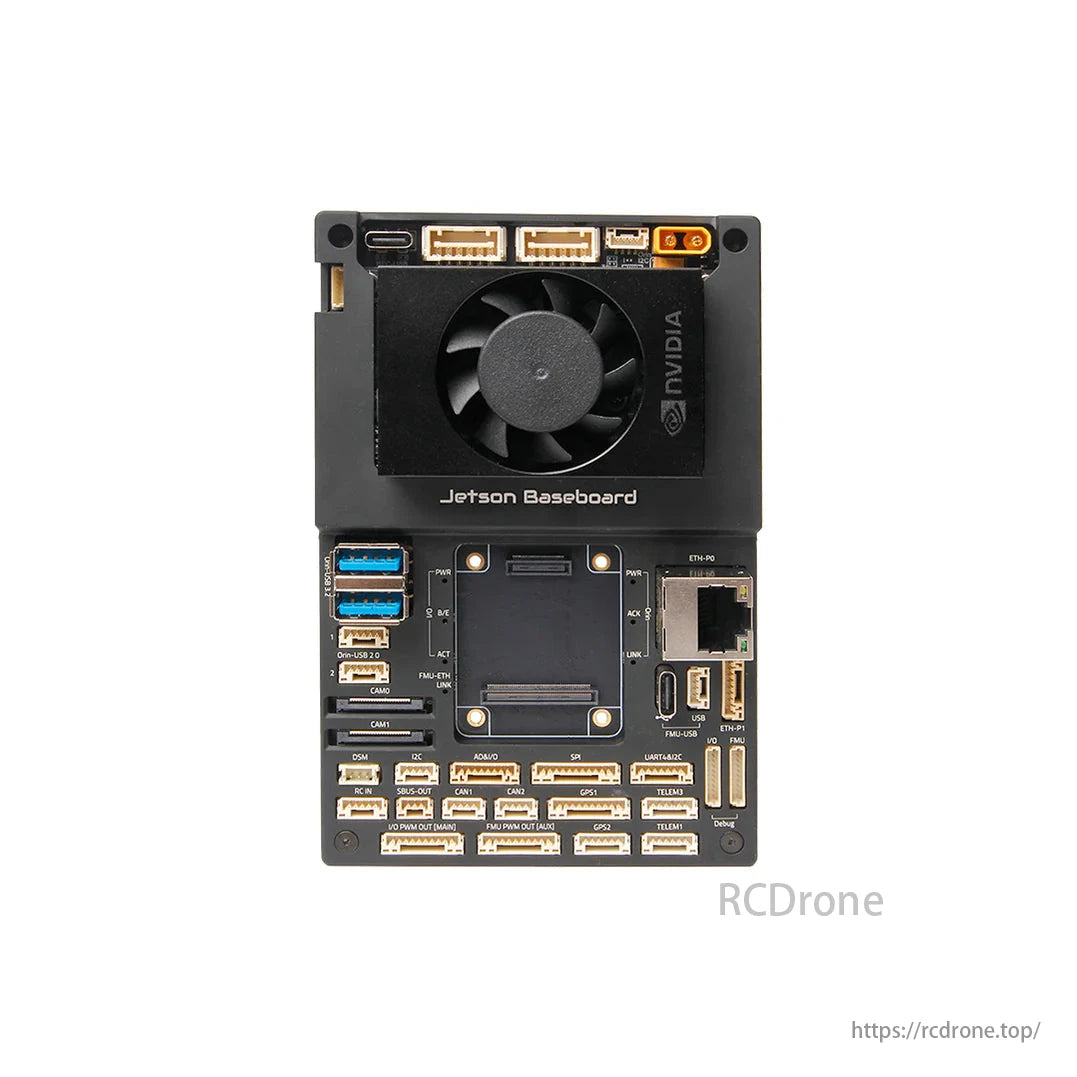
O Holybro Pixhawk Jetson Rodapé é projetado com base no Especificação de código aberto do Pixhawk Autopilot Bus (PAB) e integra-se perfeitamente com o Placa transportadora NVIDIA Jetson Orin NX/Nano. O Fator de forma PAB permite compatibilidade com qualquer controlador de voo PAB, incluindo o Pixhawk 6X. Esta placa combina o poder computacional de NVIDIA Jetson com as capacidades de controle de voo de Pixhawk, tornando-o ideal para aplicações autônomas avançadas.
Principais características
-
Sistema Unificado: Combinações Pixhawk e NVIDIA Jetson em uma única placa.
-
Conectividade perfeita: Jetson e Pixhawk se comunicam via Comutador UART, CAN e Ethernet.
-
Ampla compatibilidade: Suporta Jetson Orin NX e Orin Nano.
-
Expansão de alta velocidade: Características 2x slots para chaves M.2 para WiFi/Bluetooth e SSD NVMe.
-
Integração Pixhawk 6X: Equipado com Sensores ICM-45686 para maior controle de voo.
Processadores e Sensores
Processador FMU:
-
STM32H753
-
ARM Cortex-M7 de 32 bits, 480 MHz
-
2 MB de memória flash, 1 MB de RAM
Processador IO:
-
STM32F103
-
ARM Cortex-M3 de 32 bits, 72 MHz
-
64 KB de SRAM
Sensores de bordo (Rev8)
-
Acelerômetro/Giroscópio: 3x ICM-45686 (com tecnologia BalancedGyro™)
-
Barômetro: ICP20100 e BMP388
-
Magnetômetro: BMM150
Portas de rodapé e conectividade
Conectores Jetson
-
2x Portas Gigabit Ethernet (Conectado ao Jetson e ao Autopilot via Comutador Ethernet RTL8367S)
-
2x entradas de câmera MIPI CSI (4 pistas cada, Câmera Raspberry Pi FFC de 22 pinos)
-
2 portas USB 3.0 Host (USB-A, limite de corrente de 5A)
-
2x USB 2.0 Portas de Host (JST-GH de 5 pinos)
-
USB 2.0 para depuração (USB-C)
-
Saída Mini HDMI
-
2x Slots M.2:
-
Chave M (2242) para SSD NVMe (PCIEx4)
-
Chave E (2230) para WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
Porta CAN (Conectado a Piloto automático CAN2, JST-GH de 4 pinos)
-
Portas SPI, I2C, I2S, UART (Vários conectores JST-GH)
-
Porta de alimentação do ventilador
-
Entrada de energia: Conector XT30, 7-21V (3S-4S)
-
UBEC 12A (3-14S) Recomendado para aplicações >4S
Conectores de piloto automático
-
Interface de barramento do piloto automático Pixhawk: Hirose DF40 de 100 pinos e 50 pinos
-
Entradas de módulo de energia digital redundante
-
Suporte para monitor de energia I2C
-
Portas de GPS e interruptores de segurança: JST-GH de 10 pinos e 6 pinos
-
2x Portas CAN (4 pinos JST-GH)
-
3x Portas de Telemetria (JST-GH, uma conectada ao UART1 do Jetson)
-
16 saídas PWM (2x 10 pinos JST-GH)
-
USB 2.0 (USB-C e JST-GH de 4 pinos)
-
Entrada DSM (JST-ZH de 3 pinos, passo de 1,5 mm)
-
Entrada RC (PPM/SBUS, 5 pinos JST-GH)
-
Porta SPI para barramento de sensor externo (SPI5, 11 pinos JST-GH)
-
2x Portas de Depuração (FMU e IO, JST-SH de 10 pinos)
Requisitos de energia
-
Tensão de entrada: 7-21V (3S-4S) via conector XT30
-
Requisito mínimo de potência: 8V/3A (varia de acordo com os periféricos)
-
Suporta UBEC externo 12A (3-14S) para redundância e aplicações de alta tensão
-
Proteção contra sobretensão integrada
Dimensões e peso
-
Tamanho da placa: 126 x 80 x 38 mm (sem Jetson e controlador de voo)
-
Peso: 203.2g (Incluindo Jetson, dissipador de calor, controlador de voo, SSD, módulo Wi-Fi)
Especificações do UBEC-12A
-
Tensão de entrada: 3~14S (XT30)
-
Tensão de saída: 6,0 V/7,2 V/8,0 V/9,2 V (7,2 V recomendado para Jetson)
-
Corrente de saída contínua: 12A
-
Corrente de saída de ruptura: 24A
-
Tamanho: 48 x 33,6 x 16,3 mm
-
Peso: 47,8g
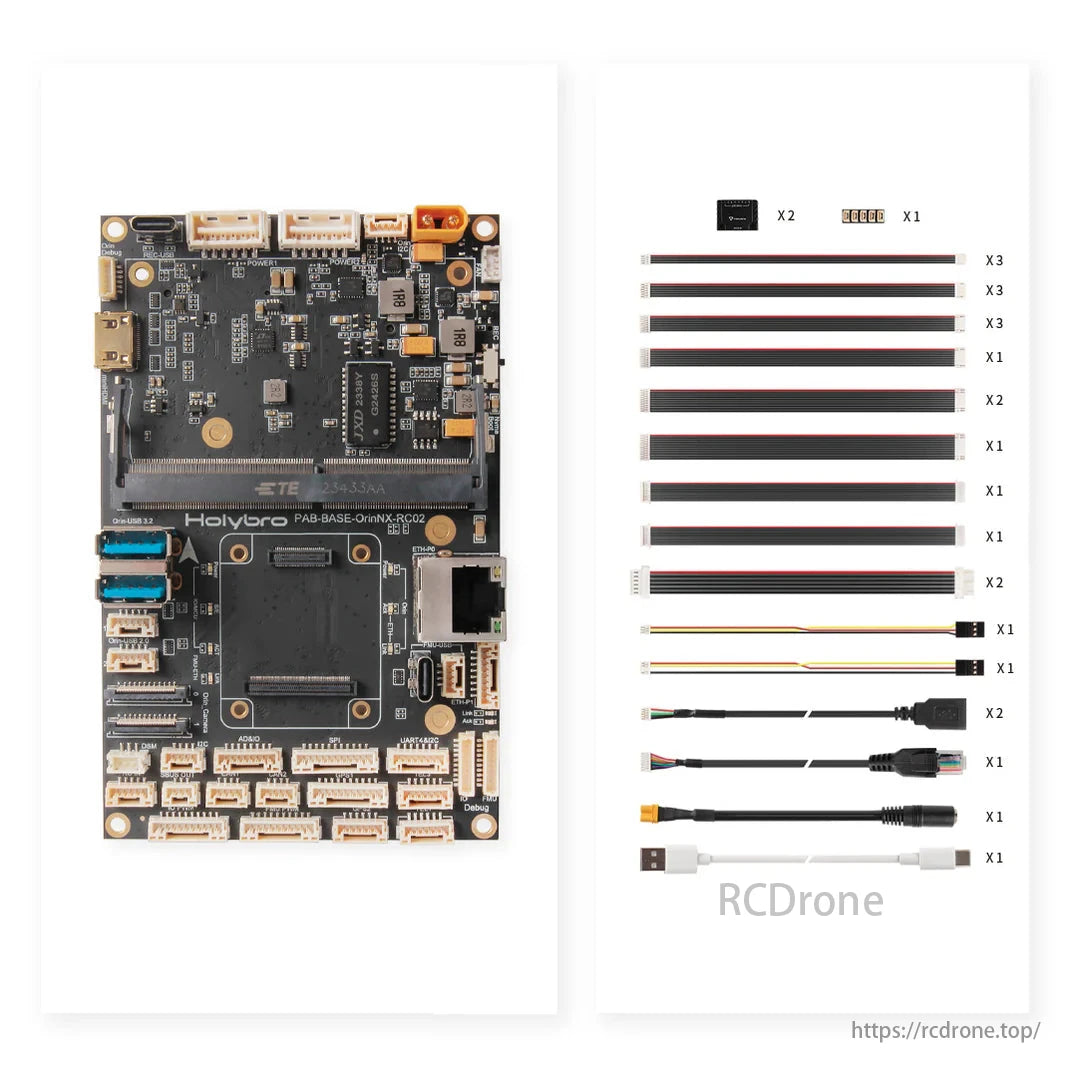
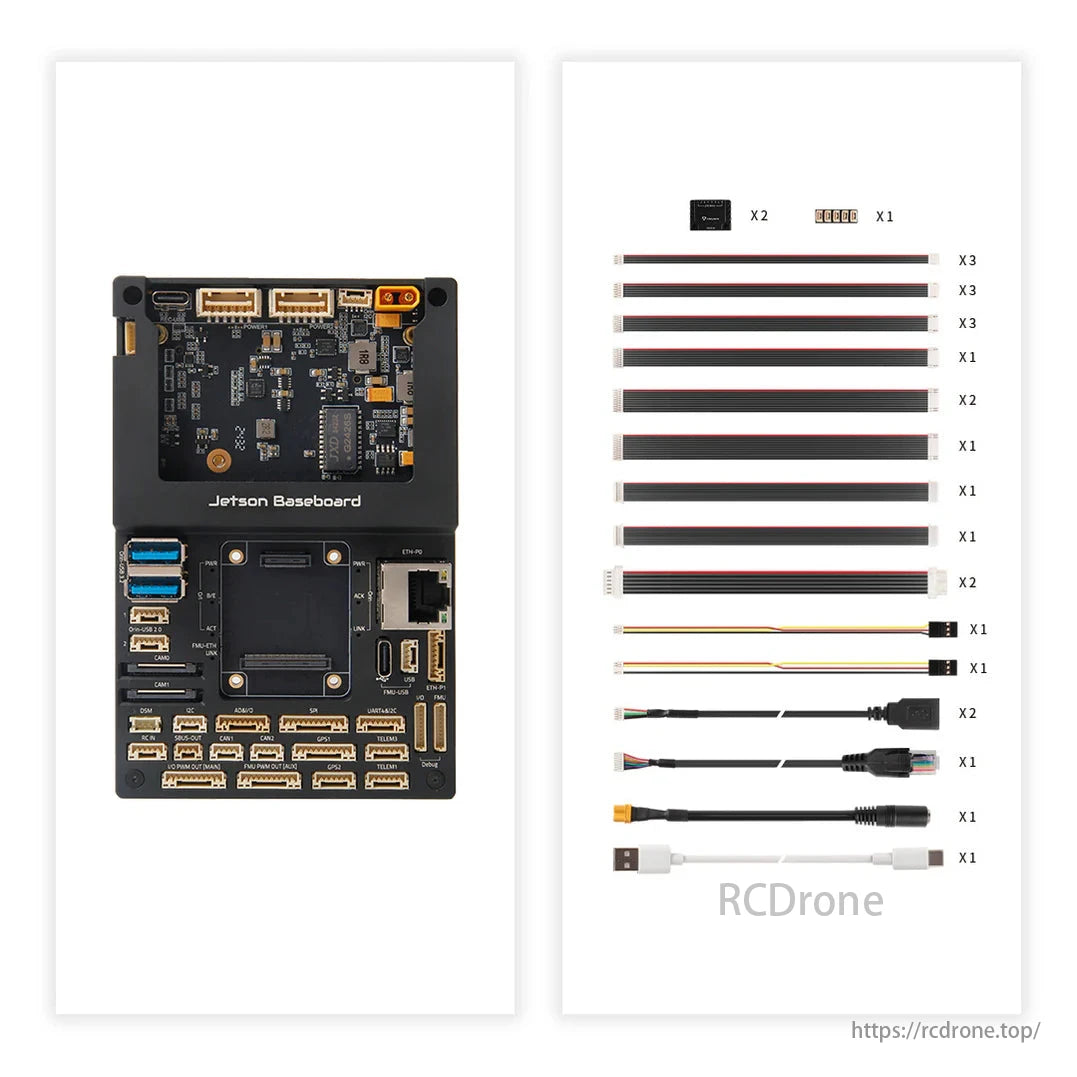
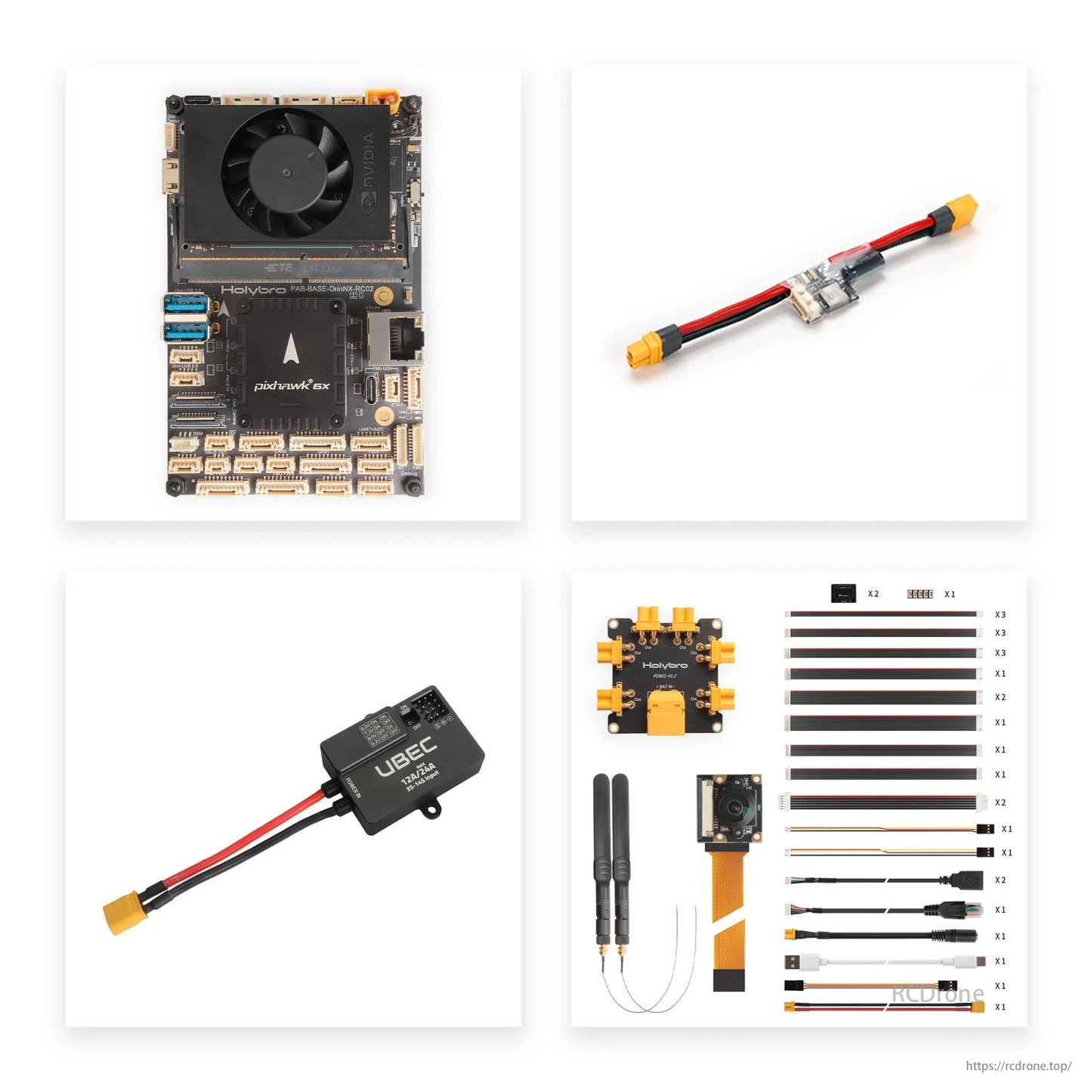
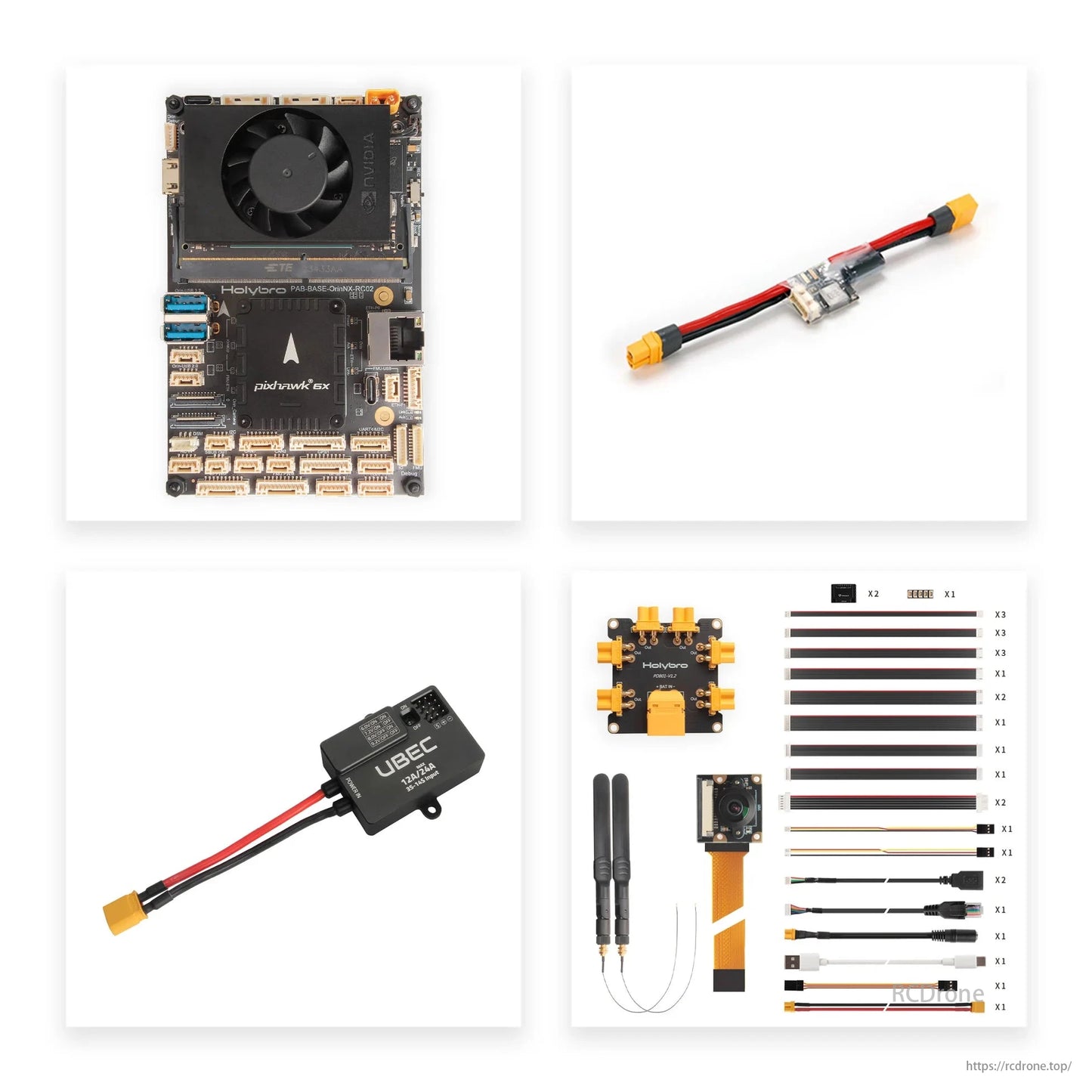
Conteúdo da embalagem
Pacote Pixhawk 6X
-
Módulo controlador de voo Pixhawk 6X (ICM-45686)
-
Rodapé Pixhawk Jetson Orin
-
Nvidia Orin NX (16 GB de RAM) / Orin Nano (4 GB de RAM) com dissipador de calor e ventoinha
-
SSD: Samsung PM9B1 PCIe 4.0 NVMe 512 GB
-
Módulo Wi-Fi e Bluetooth: Intel 8265NGW Banda dupla CA / Realtek RTL8B22CE
-
Câmera: IMX219-200
-
Módulo de potência PM02D
-
UBEC 12A (3-14S)
-
Conjunto de placa e cabo PDB
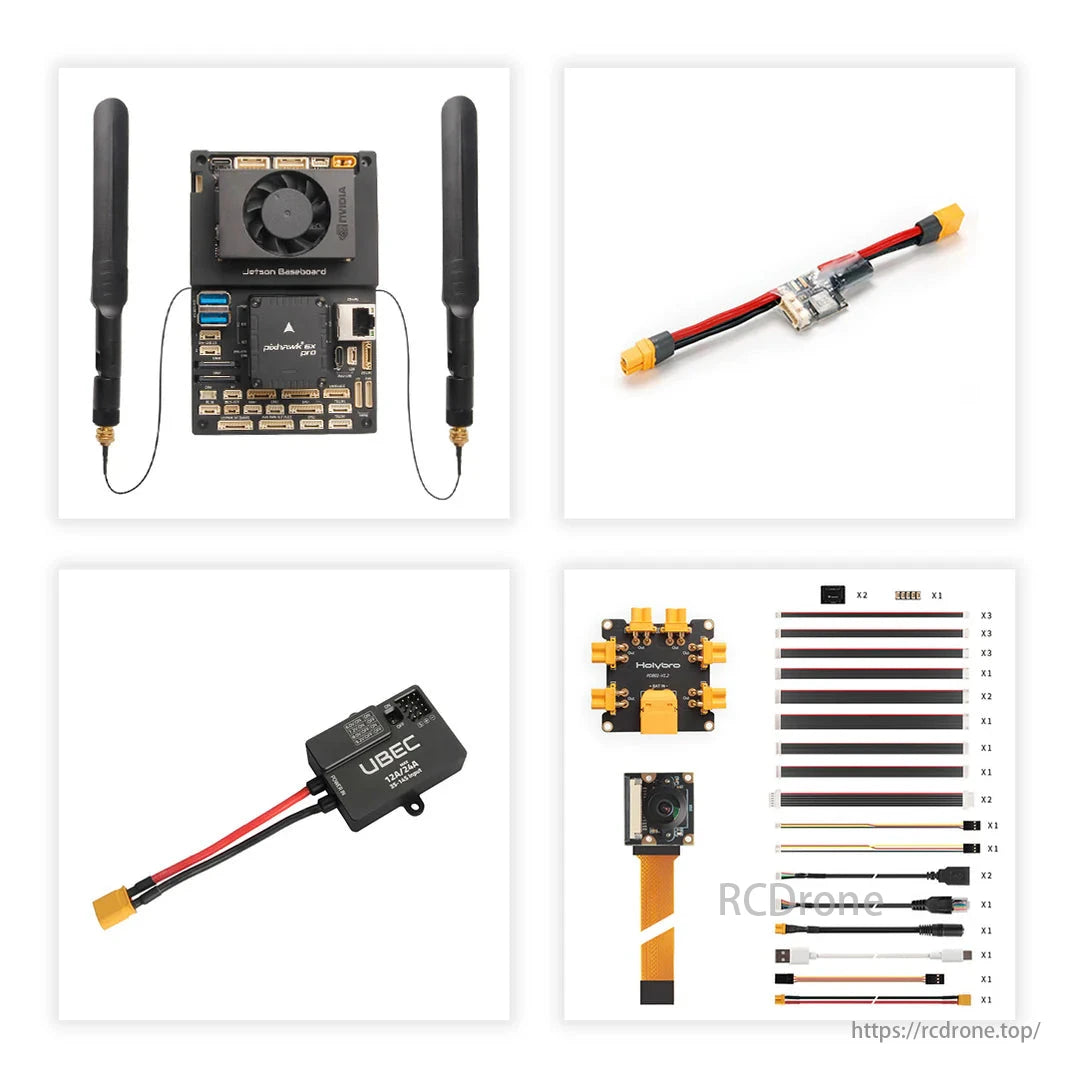
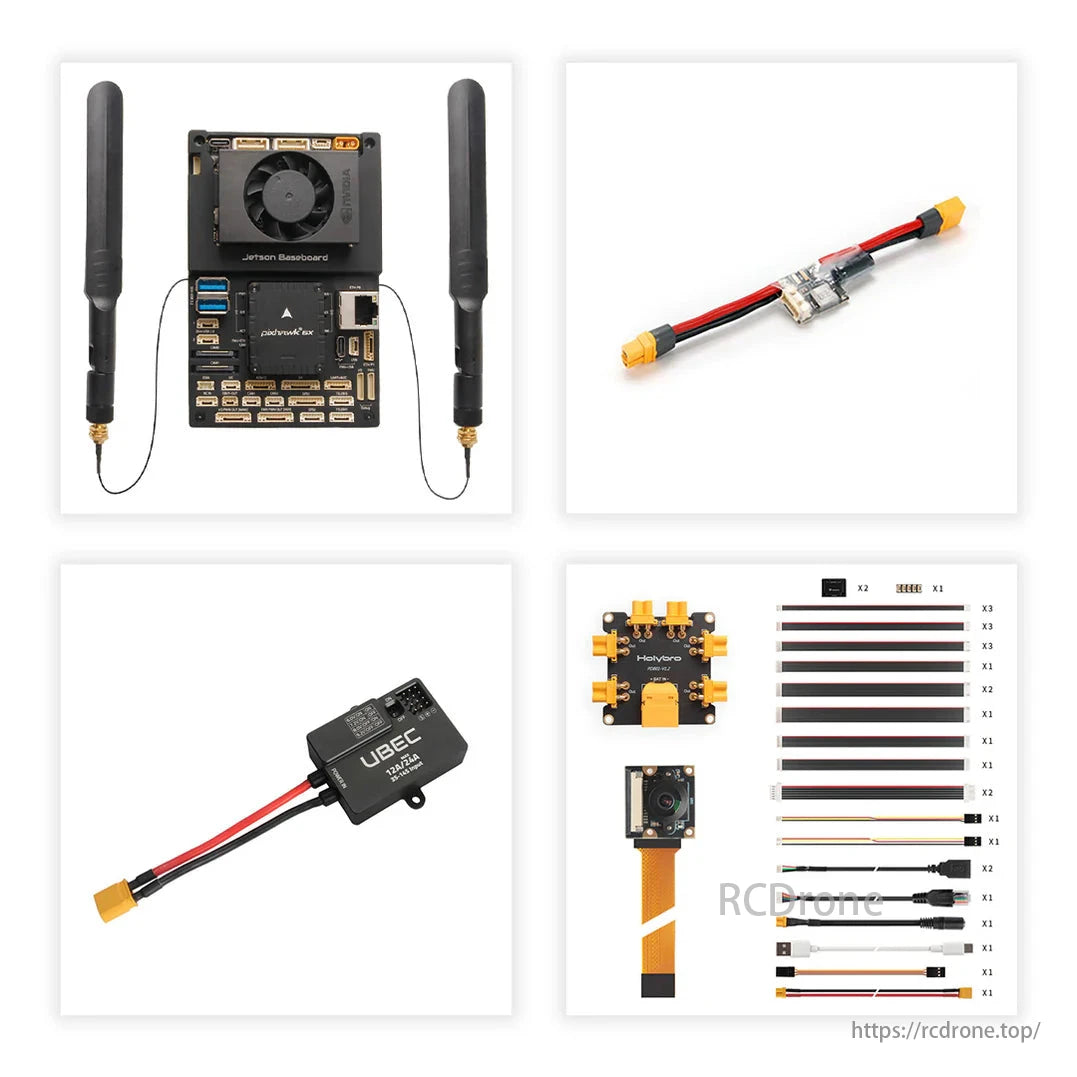
Pacote Pixhawk 6X Pro
-
Módulo controlador de voo Pixhawk 6X Pro
-
Rodapé Pixhawk Jetson Orin (sem ou sem caixa)
-
Nvidia Orin NX (16 GB de RAM) / Orin Nano (4 GB de RAM) com dissipador de calor e ventoinha
-
SSD, módulo Wi-Fi/Bluetooth, câmera, módulo de energia PM02D, UBEC 12A, placa PDB, conjunto de cabos
Somente rodapé Jetson
-
Rodapé Pixhawk Jetson Orin (sem ou sem caixa)
-
Conjunto de cabos
Links de referência
Credenciais de login padrão para Jetson Orin:
-
EU IA:
mano santo -
Senha:
123
Detalhes




Pixhawk e Nvidia Jetson combinados em uma única placa.

Nvidia jetson conectado via uart can e switch ethernet usando conector rj45 para sistemas de piloto automático
Especificação de código aberto do Pixhawk Autopilot Bus (PAB)

Sistema de conectores Jetson SoDIMM totalmente compatível: Jetson Orin NX/Nano

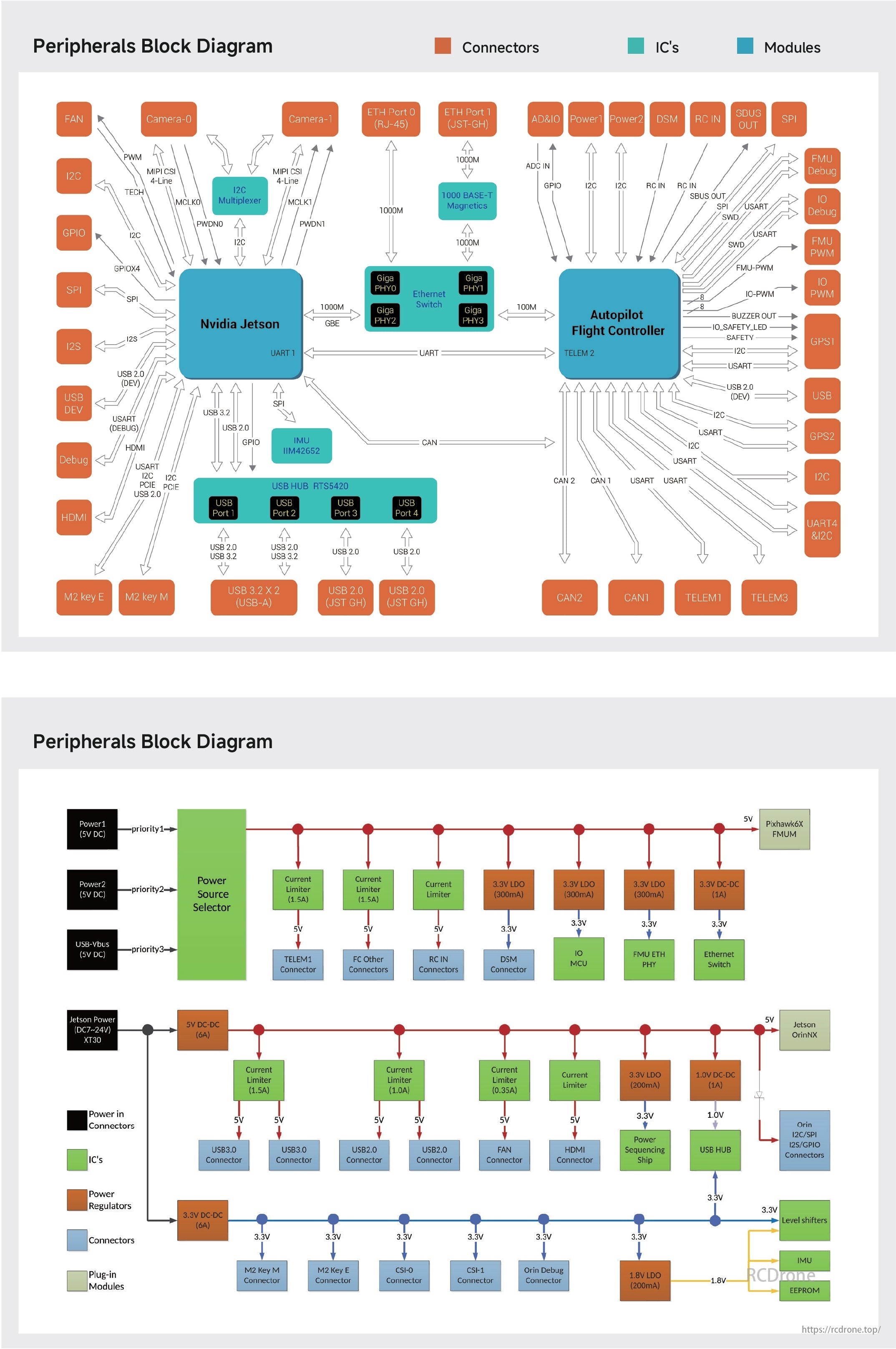
A imagem descreve um diagrama de blocos de periféricos para um sistema embarcado, apresentando componentes como o Nvidia Jetson e o Autopilot Flight Controller. Ele inclui vários conectores, ICs e módulos, como portas USB, switches Ethernet e reguladores de energia, ilustrando suas interconexões e fluxo de dados.
Diagrama de fiação de referência

Dois diagramas ilustram sistemas de distribuição de energia para um módulo Jetson usando uma bateria. O diagrama da esquerda usa um Módulo de Energia PM02D e uma Placa de Distribuição de Energia, enquanto o diagrama da direita inclui um UBEC Externo para baterias maiores que 4S.Ambas as configurações garantem a regulação de voltagem adequada para o Jetson e o Pixhawk Power.
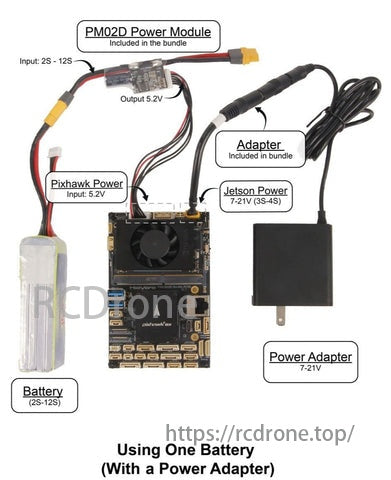
O módulo de energia PM02D conecta a bateria ao Pixhawk e ao Jetson, usando uma bateria com um adaptador de energia para entrada de 7-21 V.
Related Collections