


Inspire Robots RH56DFTP Mão Robótica Destreza – 6 DOF, 30N de Aperto, Sensores Táteis de Força &, Controlo ModbusTCP+CAN
Inspire Robots RH56DFTP Mão Robótica Destreza – 6 DOF, 30N de Aperto, Sensores Táteis de Força &, Controlo ModbusTCP+CAN
Inspire Robots
Não foi possível carregar a disponibilidade de recolha
Visão Geral
A Inspire Robots RH56DFTP Mão Robótica Biónica Inteligente é uma mão destroçada de alta precisão, com cinco dedos, projetada para aplicações robóticas avançadas. Com 6 graus de liberdade, 12 articulações, e uma combinação de 6 sensores de força e 17 sensores táteis, oferece dextreza e percepção tátil semelhantes às humanas. Com uma força de ponta de dedo de 30N (≈3 kg por dedo), movimento angular de alta velocidade e comunicação ModbusTCP+CAN (RS485) sem interrupções, esta mão é ideal para pesquisa, automação industrial e robótica biónica.
Principais Características
-
Precisão tátil semelhante à humana: Sensores táteis integrados oferecem percepção em tempo real para manipulação precisa de objetos.
-
Agarre forte e estável: Cada dedo fornece até 3 kg de força de atuação, permitindo a apreensão confiável de vários objetos.
-
Auto-bloqueio por perda de energia: Mantém a posição quando desligado, eliminando a necessidade de re-zero durante a inicialização.
-
Operação em alta velocidade: O movimento do polegar excede 130°/s, enquanto o movimento de quatro dedos atinge 200°/s para um controlo responsivo.
-
Durável e fiável: Construído para uso a longo prazo em laboratórios de pesquisa, plataformas robóticas e ambientes industriais.
Especificações
| Parâmetro | Valor |
|---|---|
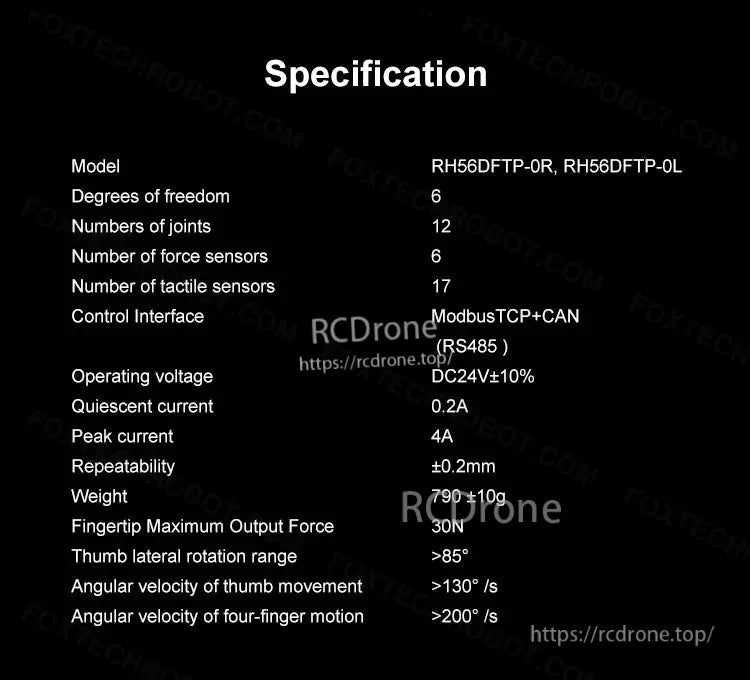
| Modelo | RH56DFTP-0R, RH56DFTP-0L |
| Graus de liberdade | 6 |
| Número de articulações | 12 |
| Sensores de força | 6 |
| Sensores táteis | 17 |
| Interface de controlo | ModbusTCP + CAN (RS485) |
| Tensão de funcionamento | DC 24V ±10% |
| Corrente em repouso | 0.2A |
| Corrente de pico | 4A |
| Repetibilidade | ±0.2mm |
| Peso | 790g ±10g |
| Força máxima de saída na ponta dos dedos | 30N (≈3 kg) |
| Amplitude de rotação lateral do polegar | >85° |
| Velocidade angular – polegar | >130°/s |
| Velocidade angular – quatro dedos | >200°/s |
Aplicações
-
Investigação e Desenvolvimento: Investigação em robótica avançada em universidades e laboratórios.
-
Automação Industrial: Tarefas de montagem e manuseio de alta precisão.
-
Soluções Biônicas: Estudos de mãos protéticas e robótica humanoide.
-
IA e Aprendizagem de Máquina: Projetos de sensorização tátil e manipulação que requerem feedback preciso em tempo real.
Destaques
O RH56DFTP destaca-se em tarefas que requerem controlo de força preciso e operações delicadas, como a colheita de mirtilos, tomates-cereja ou uvas sem causar danos. Também lida com agarramentos de alta força para aplicações industriais robustas, tornando-se uma solução versátil para tarefas de manipulação complexas.
Detalhes
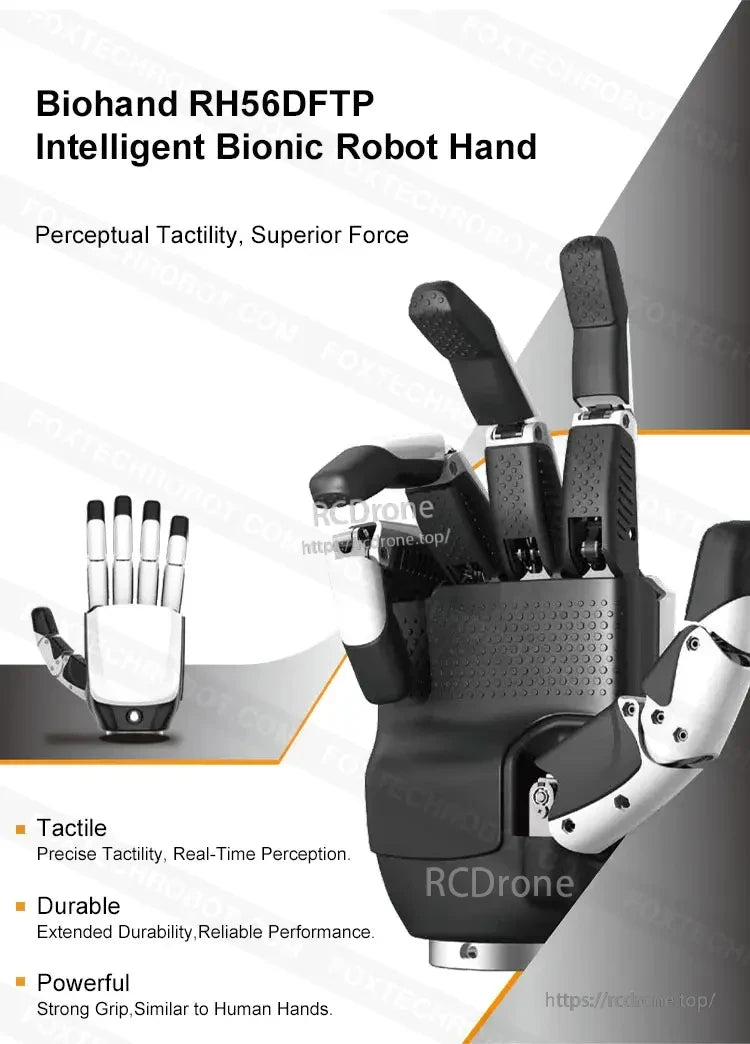
A mão robótica biónica inteligente Biohand RHS6DFTP oferece tactilidade perceptiva, força superior e tactilidade precisa em tempo real, com durabilidade prolongada para um desempenho fiável e um agarre forte e poderoso semelhante ao das mãos humanas.

Mão robótica com seis graus de liberdade, projetada para precisão e destreza, perfeita para várias aplicações, como cirurgia, montagem ou trabalho de laboratório.

Agarre poderoso, desempenho semelhante ao humano. Força de atuação de 3kg por dedo. Mão robótica ágil com design avançado e engenharia de precisão.


Mecanismo de auto-bloqueio de perda de potência mantém a posição estável e fiável sem necessidade de re-zero durante a inicialização ou desligamento.


Ferramenta manual multifuncional com sensor de força, adequada para apanhar e pinçar pequenas frutas como mirtilos, tomates-cereja e uvas.

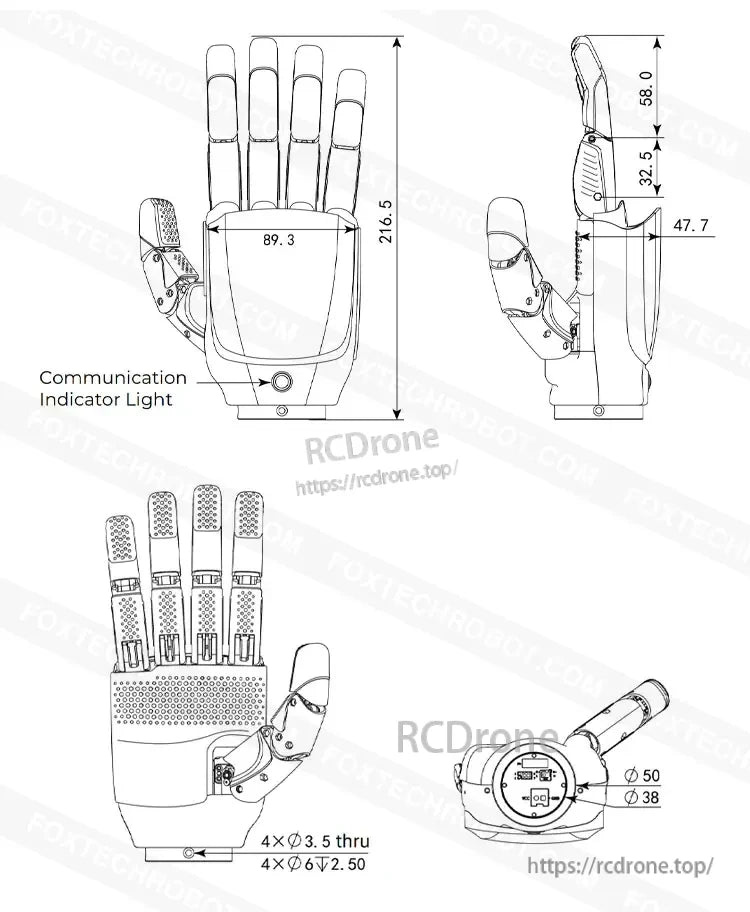
Luz Indicadora de Comunicação, 8 x 47,7 mm, 89 mm de comprimento, sem LED, 5x5: 38-4x03.5 a 4xp6v2, 50 ohms, 2 camadas
O modelo de especificação RHS6DFTP-OR e RHS6DFTP-OL apresenta 3 graus de liberdade, 12 articulações e 17 sensores de força e sensores táteis. Utiliza interface de controlo Modbus TCP+CAN (RS485) com uma tensão de operação de DC24V +10%.



Related Collections


