





JIYI K ++ V2 Flight Controller GPS Radar Combo for Agriculture Spraying Drones, Autopilot FC With Terrain Radar,Obstacle Radar,Can Hub, Flow Meter
JIYI K ++ V2 Flight Controller GPS Radar Combo for Agriculture Spraying Drones, Autopilot FC With Terrain Radar,Obstacle Radar,Can Hub, Flow Meter
JIYI
Não foi possível carregar a disponibilidade de recolha
Este é o mais recente controlador de voo JIYI K++ V2, GPS, radares e medidor de vazão para drones de pulverização agrícola. A JIYI acaba de lançar a versão mais recente do radar de terreno e radares de obstáculos. Em comparação com os radares de obstáculos anteriores, eles são ligeiramente diferentes no formato externo, mas agora possuem radar de obstáculos dianteiro e radar de obstáculos traseiro. A detecção de obstáculos em múltiplas direções tornou-se possível, melhorando a sensação de segurança de vôo.
Para o manual do usuário e outras especificações de itens, você pode verificar https://support.jiyiuav.com/.
Pacote incluído:
1x controlador de vôo JIYI K ++ V2
1x GPS
1x LED
1x PMU
1x módulo de radar de detecção de terreno (versão 2021)
1x módulo de radar para evitar obstáculos dianteiro (versão 2021)
1x módulo de radar para evitar obstáculos traseiro (2021) versão)
1x módulo CAN-HUB
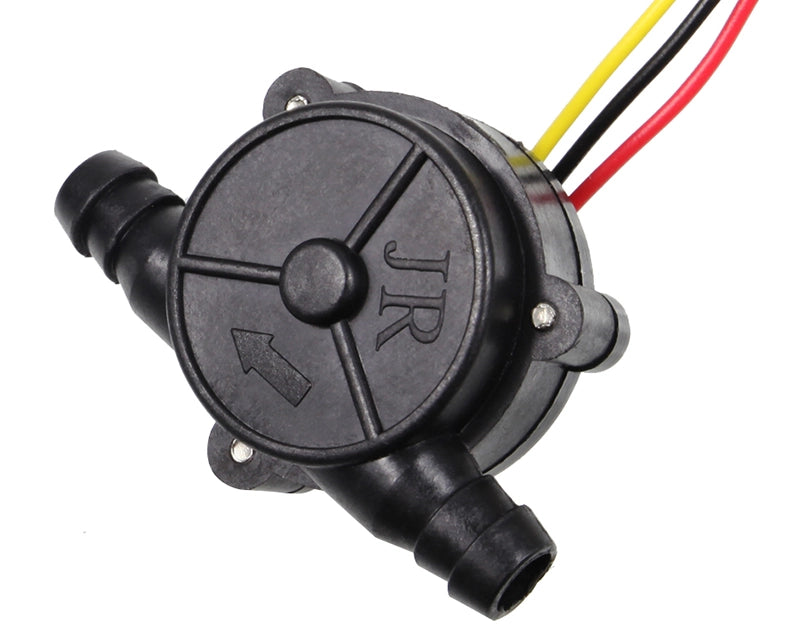
1x medidor de vazão

Principais características:
Controle preciso
Precisão de voo aumentada em 25%, precisão de controle vertical aumentada em 20%, a trajetória é mais precisa e o vôo é mais suave.
Grande resistência ao choque
Design de estrutura de absorção de choque dupla para responder a uma variedade de efeitos de vibração complexos.
Backup redundante múltiplo
Três imu redundantes,barômetro redundante duplo,torna o vôo mais seguro.
Redução de ruído e economia de energia
O ruído do motor é três vezes menor, pode economizar 5 ~15% de eletricidade.
Calibração gratuita
Configuração do sensor de nível industrial, uma calibração, calibração imu gratuita vitalícia.
Controle de atitude
Melhor resistência ao vento e o controle de atitude é mais estável,
Configuração de CPU dupla
Configuração de CPU dupla, processamento mais poderoso, suporta controle ESC de até 1000Hz.
Energia de backup
O controle principal suporta a interface de energia de backup.A fonte de alimentação é mais confiável.
Função de análise de vibração inteligente
JIYI K++ vem com função de análise de vibração inteligente, que pode determinar a vibração da aeronave em tempo real durante o vôo, e exibir o aviso de segurança no APP para ajudar a ajustar a adaptabilidade de todos os aspectos do dispositivo da fuselagem, tornando a operação de vôo mais energética eficiente, mais seguro e mais protegido.

Vários backups
K++ é equipado com três IMU redundantes e dois sensores barômetro redundantes. Durante o voo, os dados dos sensores da IMU são monitorados em tempo real através de algoritmos avançados de diagnóstico. Quando o sensor do sistema de navegação está anormal, o sistema muda imediatamente para outro sensor. Para garantir o voo seguro da aeronave.
Uma calibração, sem medo de interferências ambientais
O K++ foi aprimorado com a poderosa configuração do sensor de nível industrial e a otimização do algoritmo. Após a instalação do mesmo sistema de controle de voo da aeronave, ele só precisa ser calibrado uma vez. Mesmo que o ambiente operacional seja substituído, ele não precisa ser recalibrado e é fácil de usar.
Parâmetros do produto
Tipos de múltiplos rotores suportados:
Quadcopter (+, X)
Hexacopter (+, X, IY e YI gêmeos coaxiais)
Octocopter (+ tipo, tipo X, tipo V)
Tipo ESC suportado: 490HZ ou menos PWM ESC
Canal de saída máximo: 8 canais
Tipo de controle remoto recomendado
Tipos de receptor suportados: PPM , Receptor S-BUS
Equipamento de expansão de suporte: K-BOX, IOT, RTK, radar para evitar obstáculos, radar de terreno, controle remoto integrado, câmera FPV, medidor de vazão, medidor de nível
Tensão de trabalho: 2-12S
Consumo de energia: menos de 5W
Temperatura do ambiente de trabalho: -10~60°C
Temperatura do ambiente de armazenamento: -25~60°C
Classificação de resistência a terremotos: <1G
Características de voo
Precisão de pairar: direção horizontal ±1,5 m; direção vertical ±0,5 m
Ângulo máximo de inclinação: 30°
Velocidade máxima de guinada: 150°/seg
Receptor SBUS Velocidade vertical máxima: 6 m / s
Resistência ao vento: vento contínuo: 4
Gust: Nível 5
Modo de vôo e função:
Modo de atitude, modo GPS, operação AB, operação de rota, controle de perda de retorno de um botão, operação contínua fora de controle, proteção de baixa tensão, função de cerca, armazenamento de log função, função de bloqueio de pouso, função de zona de exclusão aérea, função de proteção contra vibração, proteção estrela Função, função de redução de ruído ativa, função de detecção de sequência de motor, função de detecção de direção, modo de bomba dupla, função de proteção contra quebra de drogas, spray de precisão, controle de interruptor de bomba de água , controle de ligação da bomba de água
Especificação de hardware
Peso:
Peso líquido total: 321g
FC: 87g
PMU: 41g
PMU2 (UPS ): 44g
Tamanho
FC: 72,6 mm × 48,0 mm × 22,8 mm
PMU: 53,4 mm × 34,4 mm x 14,5 mm
PMU2 (UPS): 53,4 mm × 34,4 mm x 14,5 mm
GPS: 62*14,3mm
LED: 24*24*8mm

Módulo Jiyi CAN HUB-12
O módulo CAN HUB-12 é principalmente um dispositivo de expansão de interface CAN desenvolvido para o controle de vôo K de nova geração da Jiyi ++ e seus periféricos de suporte periféricos. Ele suporta entrada de energia de 6-14S, saída CAN de 12V, saída de energia de 12V. A interface CAN HUB-12 possui forte capacidade de expansão. Ele integra fonte de alimentação redutora e interface de expansão em um só, que é fácil de usar.

Radar de seguimento de terreno
O módulo de radar de seguimento de terreno utiliza tecnologia de radar de ondas milimétricas. Através da varredura contínua do radar, a aeronave pode detectar a mudança do terreno na direção do vôo e ajustar a altura do vôo a tempo de acordo com o terreno e a altura da colheita para alcançar um vôo semelhante ao do solo e garantir uma pulverização uniforme durante o vôo. O módulo de radar semelhante ao solo tem desempenho de detecção estável e boa aplicabilidade ambiental, forte capacidade anti-interferência, não é afetado pela luz, longa distância de detecção e tem as características de todos os climas e o dia todo.
Especificações:
Tamanho do produto: 82,4 x74,2x20mm
Peso: <50g
Modo de modulação: FMCW
Frequência central: 24,125GHz
Ambiente de uso: Sem obstrução abaixo
Tente ficar longe da névoa de água
Faixa de altimetria: 0,3-15m (em relação ao solo)
Precisão de altimetria 0,05m
Saída Frequência: 50Hz
Consumo de energia: 1.5W @25℃
Tensão de trabalho: 6-28V
Temperatura de trabalho: -20℃ a 85℃
Nível de proteção: IP67
Interface de saída: CAN

Radar para evitar obstáculos dianteiro/traseiro
O módulo de radar para evitar obstáculos é usado para medir a distância relativa entre o UAV e o obstáculo anterior e evitar efetivamente o obstáculo. O radar para evitar obstáculos emprega tecnologia de radar de 24 GHz e opera em ambientes como luz forte, alta temperatura, neblina, poeira, vento e noite. Possui alta sensibilidade, longa distância de detecção, alta velocidade e transmissão de sinal estável. Ele pode detectar cabos diagonais com mais de 1 cm, pequenos troncos de árvores com 10 cm, pessoas com 1,7 m de altura e postes com 15 cm. É muito adequado para operar em ambientes complexos, como UAVs de alta velocidade e drones de pulverização de pesticidas, com excelente capacidade de evitar obstáculos.

Medidor de vazão:
Related Collections





