Jumper Xiake800 VTOL - Asa Fixa Y3 Decolagem Vertical 800mm Envergadura FPV Aeronaves de Voo Longo Porta-aviões Modelo RC
Jumper Xiake800 VTOL - Asa Fixa Y3 Decolagem Vertical 800mm Envergadura FPV Aeronaves de Voo Longo Porta-aviões Modelo RC
RCDrone
Não foi possível carregar a disponibilidade de recolha
ESPECIFICAÇÕES DO Jumper Xiake800 VTOL
Resolução de captura de vídeo: Outro
Tipo: Avião
Estado da montagem: Quase pronto
Distância remota: 5km
Controle remoto: Sim
Idade recomendada: 14+a
Fonte de energia: Elétrica
O pacote inclui: Controle remoto
Origem: China Continental
Nível de habilidade do operador: Intermediário
Número do modelo: XIAKE800 envergadura de 800 mm
Material: Espuma
Uso interno/externo: Externo
Tempo de voo: 30min
Recursos: Retorno automático
Dimensões: 51cm-99cm
Modo Controlador: MODE2
Bateria do controlador: recomendado 4s 1500-2200mah 30C
Canais de controle: 12 canais e mais
Tipo de montagem de câmera: Outro
Marca: uuustore
Fotografia aérea: Não
Especificações:
Marca: Jumper
Modelo: XiaKe800
Modelo: Asa de decolagem vertical Y3
Envergadura: 800mm
Hélice: 6238
Motor: 2205,5
Regulação elétrica: 30A
Controle de vôo: baseado em PIX
BEC: saída de dupla tensão
Receptor: ELRS3.0
Interface FPV: HD/analógico
GPS: retorno com um clique
Engrenagem de direção: todos os dentes de metal
Bateria: recomendado 4s 1500-2200mah 30C
Resistência: 30 minutos
Peso de decolagem: 650-1000g
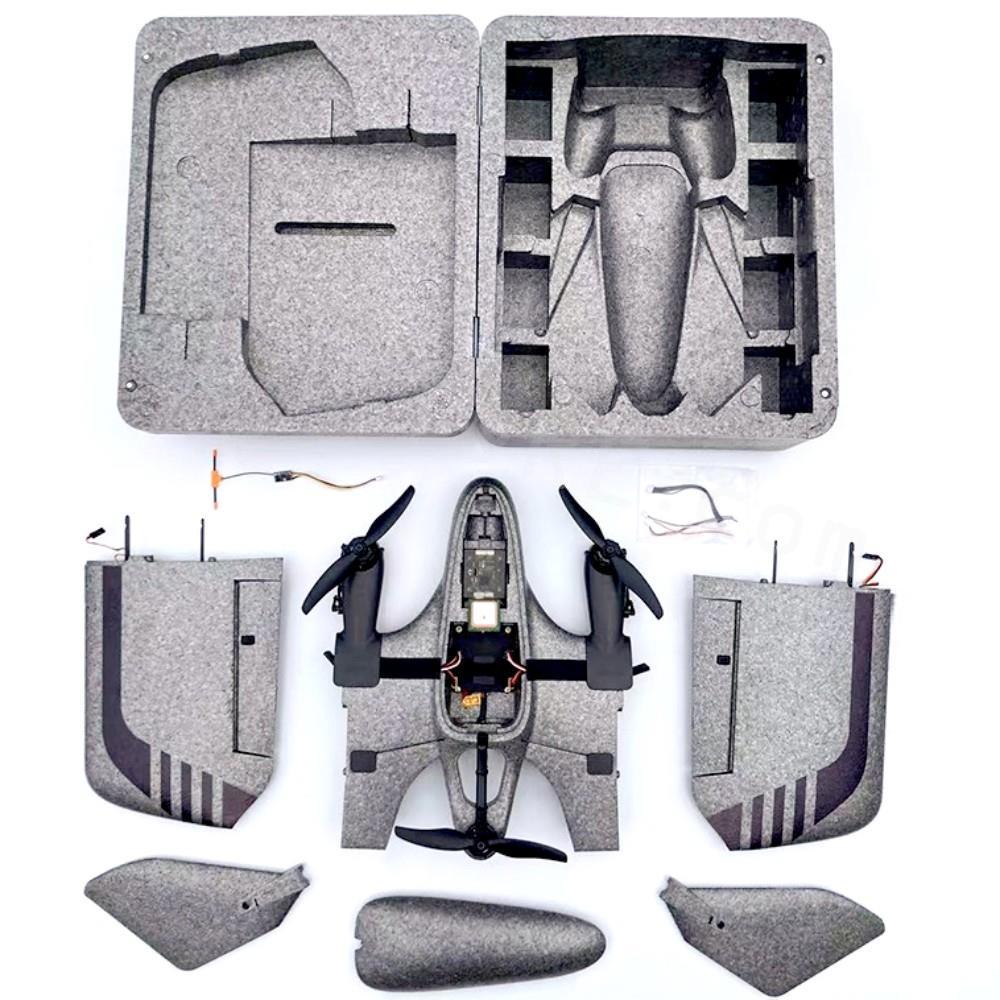
Pacote PNP incluído:
(Corpo EPP+peças plásticas, controle de vôo, motor elétrico, regulador elétrico, aparelho de direção, bloco de módulo GPS, hélice )
período de promoção: adicionar Interface ELRS ou D16 CRSF e caixa de embalagem
Configuração PNP * 1,
T-PRO-ELRS -SE controle remoto * 1,
Observação:recomendamos Bateria Tattu 4s 2200 45c, mas não está incluída no pacote
Precauções de voo do UAV XIAKE800
Configuração de fábrica do controle de voo
Padrão:
1. Modo de autoestabilização vertical: apenas estabilização de atitude. Aceleração, elevação, rolamento e rumo são todos controlados manualmente
2. Modo de voo autoestabilizado A: apenas estabilização de atitude. O acelerador, a elevação e o rolamento são todos controlados manualmente
3. Modo cruzeiro: posição intermediária da alavanca do acelerador, altitude e manutenção do curso; Modo de retorno: retorno de asa fixa, com altitude de 100 metros, retorno para pairar sobre o ponto de decolagem sem pousar
Prompt de parâmetro de voo:
1. Aviso de altitude mínima: o padrão é 20m. Se a aeronave estiver abaixo de 20 m, a "altitude muito baixa" será transmitida. 2. Transmissão de energia da bateria: transmitirá a porcentagem de energia da bateria aérea em tempo real >3. Transmissão de mudança de modo: ao mudar de modo, solicita o modo de voo atual
4. Anúncio de bloqueio do GPS: quando o GPS estiver bloqueado, o "bloqueio do GPS 3D" será anunciado"
Precauções para o processo de voo:
1. Decolagem em "modo de autoestabilização vertical": Não pressione o acelerador bruscamente e ajuste a aeronave em atitude horizontal. tempo real.
2. Conversão de "modo de autoestabilização vertical" para "modo de autoestabilização modo de vôo A": para o primeiro vôo, recomenda-se que a altura de conversão não seja inferior a 30 metros, a posição intermediária da alavanca do acelerador, o interruptor, e o controle de vôo controlará automaticamente a conversão, sendo proibido bater no manche durante este processo. Durante o processo de conversão da aeronave, a velocidade do motor aumenta significativamente (ouça o som). Após a conversão, o controle remoto retoma o controle da velocidade do motor (neste momento, o som cai significativamente correspondendo à posição intermediária do acelerador). O motor de cauda para de girar, o nariz se levanta e a aeronave volta para o estado de vôo nivelado. A conversão é concluída (esse processo leva de 2 a 3 segundos).
3. Mude do "modo de autoestabilização, modo de vôo A" para "modo de cruzeiro": ajuste a altitude, mude para o "modo de cruzeiro" após o rumo, e a aeronave entrará na altitude e no estado de manutenção do rumo (acelerador 50%)
4. “Modo retorno”: A altitude da aeronave é ajustada automaticamente para 100m e retorna. Caso seja necessário trocar, basta mudar para outros modos.
5. Mude para o "modo de autoestabilização vertical" para pousar: voe até a altitude acima do ponto de pouso (a altitude não é muito alta), centralize o acelerador, mude o interruptor e a aeronave mudará rapidamente para o "modo de autoestabilização vertical".
6. Deve-se prestar atenção durante o pouso: Se a altitude de flutuação for muito alta, a potência do motor cairá durante a coleta de combustível e o pouso, o que enfraquecerá a capacidade de ajuste de autoestabilidade da aeronave e aumentará significativamente o impacto do vento. Sugestão: Após passar do vôo nivelado para o vôo vertical, ainda use a asa fixa para voar (o pushrod diminui a altitude e o acelerador pode estar baixo neste momento). Com a diminuição da altitude e da velocidade, aumente gradualmente o acelerador (lembre-se, é impossível estolar em vôo vertical).
Atenção: não trave o acelerador quando a aeronave estiver no ar (um novo ponto de retorno será salvo toda vez que a aeronave for destravada)


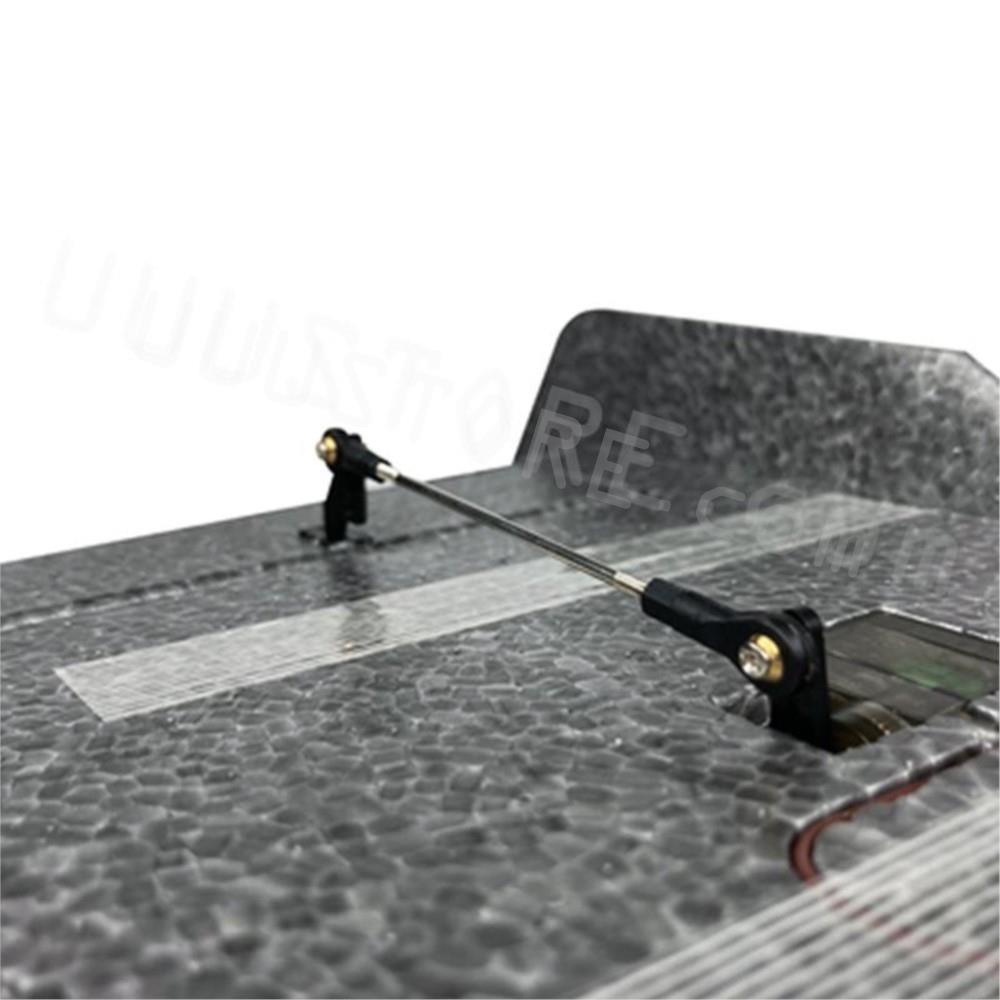
A decolagem e aterrissagem verticais eliminam as dificuldades associadas às aeronaves tradicionais de asa fixa durante a decolagem e aterrissagem. Este projeto reduz os requisitos do local necessários para a decolagem, pois possui um mecanismo de elevação que aciona o modo adotado para encurtar o braço de força da caixa de direção tanto quanto possível, eliminando assim completamente o tremor e os fenômenos de autoexcitação causados pela direção de acionamento direto gear.
XIAKE8OO tem um controlador de vôo tallored baseado em PIX e BEC Torne o layout da fiação da sala de máquinas simples e confiável Saídas BEC SV (para controle de vôo) e 9V (para FPV), respectivamente.

XIAKE8O possui uma caixa de armazenamento segura e compacta O armazenamento de peças da fuselagem tipo fivela torna o transporte mais seguro. 8 posições de armazenamento de bateria independentes, pode voar o dia todo.
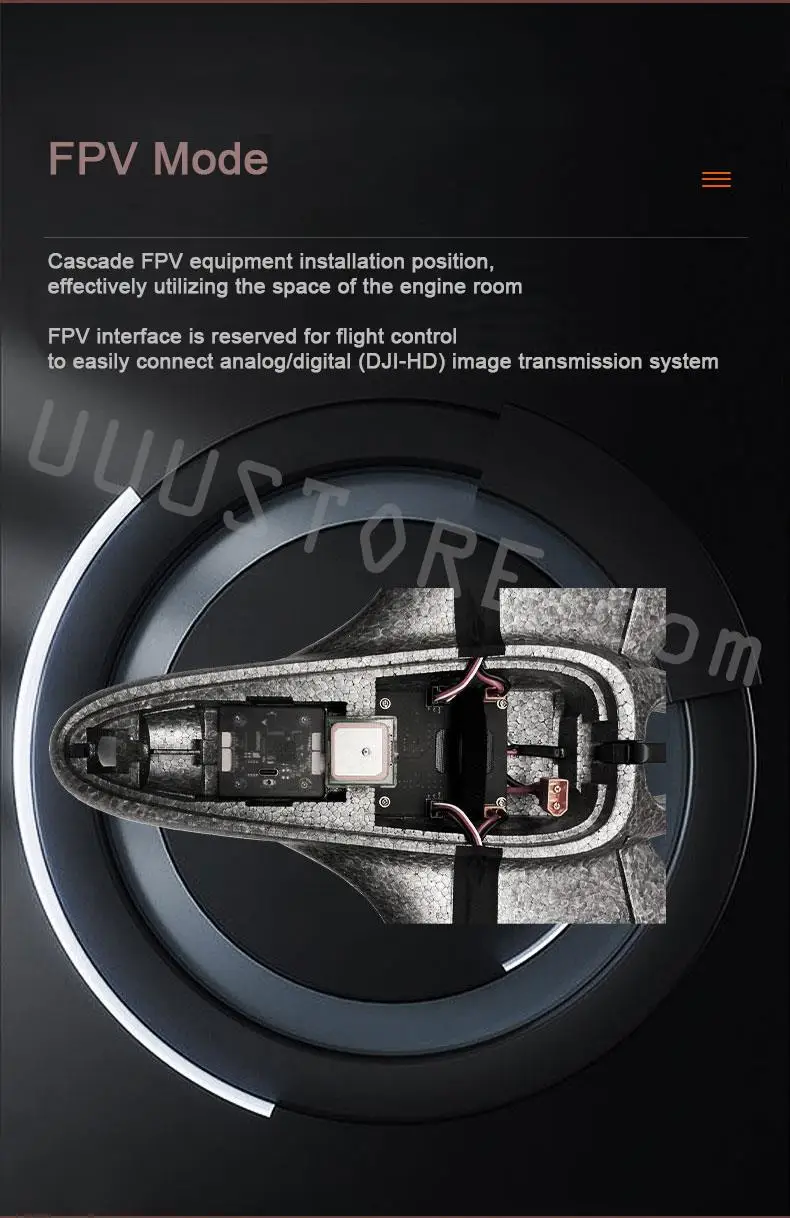
A interface Cascade FPV foi projetada para fácil conectividade com controladores de vôo, permitindo integração perfeita com transmissão de imagem analógica e digital (como DJI HD). sistemas.

A inovadora estrutura de desmontagem rápida do XIAKE8OO facilita o transporte e o transporte.A asa adota a interface DuPont tradicional, que ainda pode ser usada quando a asa vibra.

Diagrama de fiação de controle de vôo XIAKE800 (versões PNP e RTF, fiação e depuração têm foram concluídos antes da entrega)
Related Collections