

Motor Robô Série JUXIE INTELLIGENT CE-HM-R120, 48 V, 51:1/101:1/161:1, até 600 Nm pico, duplos codificadores, EtherCAT/CAN
Motor Robô Série JUXIE INTELLIGENT CE-HM-R120, 48 V, 51:1/101:1/161:1, até 600 Nm pico, duplos codificadores, EtherCAT/CAN
JUXIE INTELLIGENT
Não foi possível carregar a disponibilidade de recolha
Visão Geral
A série JUXIE INTELLIGENT CE-HM-R120 é uma plataforma de motor robótico de alto torque para robótica humanoide e móvel. A série oferece várias configurações de engrenagem (51:1, 101:1, 161:1) e uma variante de alta potência CE-HM-R120Max. Integra encoders duplos (19 bits de volta única) e um driver EtherCAT/CAN com laço de corrente de 50KHz e laço de velocidade de 10KHz. Os casos de uso típicos incluem articulações de ombro, quadril e cintura em robôs humanoides e braços robóticos, com dimensões compactas de R120*78.5mm ou R120*100mm e peso total de 2.5kg a 4kg.
Principais Características
- Configurações: 51:1, 101:1, 161:1; CE-HM-R120Max a 161:1.
- Torque nominal até 300 Nm; torque de pico até 600 Nm.
- Baixo retrocesso: 15 arcsec (variantes R120), 30 arcsec (R120Max).
- Encoders duplos com 19 bits absolutos por volta.
- Interface do driver: EtherCAT/CAN; laço de corrente 50KHz; laço de velocidade 10KHz.
- Tensão nominal de 48 V; potência nominal até 1166,4 W.
- Dimensões compactas R120*78,5mm ou R120*100mm; peso de 2,5kg a 4kg.
- A evidência em vista explodida indica um redutor harmónico, motor de torque sem estrutura e design de eixo totalmente oco em toda a série.
Especificações
| Parâmetro | CE-HM-R120 (51:1) | CE-HM-R120 (101:1) | CE-HM-R120 (161:1) | CE-HM-R120Max (161:1) |
|---|---|---|---|---|
| Velocidade de Saída (RPM) | 49 | 20 | 12 | 11 |
| Torque Nominal (Nm) | 66 | 131 | 200 | 300 |
| Torque de Pico (Nm) | 165 | 300 | 500 | 600 |
| Folga (arcsec) | 15 | 15 | 15 | 30 |
| Tensão Nominal (V) | 48 | 48 | 48 | 48 |
| Potência Nominal (W) | 732 | 732 | 732 | 1166.4 |
| Velocidade Nominal (RPM) | 3500 | 3500 | 3500 | 1800 |
| Corrente Nominal (A) | 15 | 15 | 15 | 24.3 |
| Corrente de Pico (A) | 45 | 45 | 45 | 93 |
| Encoder | Encoders duplos; absoluto de uma volta de 19 bits por volta | Encoders duplos; absoluto de uma volta de 19 bits por volta | Encoders duplos; absoluto de uma volta de 19 bits por volta | Encoders duplos; absoluto de uma volta de 19 bits por volta |
| Driver | Interface: EtherCAT/CAN; Laço de corrente: 50KHz; Laço de velocidade: 10KHz | Interface: EtherCAT/CAN; Laço de corrente: 50KHz; Laço de velocidade: 10KHz | Interface: EtherCAT/CAN; Laço de corrente: 50KHz; Laço de velocidade: 10KHz | Interface: EtherCAT/CAN; Laço de corrente: 50KHz; Laço de velocidade: 10KHz |
| Dimensões Gerais | R120*78.5mm | R120*78.5mm | R120*78.5mm | R120*100mm |
| Peso Total | 2.5kg | 2.5kg | 2.5kg | 4kg |
| Aplicações Típicas | Articulação do ombro, articulação do quadrilátero, articulação da cintura | Articulação do ombro, articulação do quadrilátero, articulação da cintura | Articulação do ombro, articulação do quadrilátero, articulação da cintura | Articulação do ombro, articulação do quadrilátero, articulação da cintura |
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
Manuais
Especificação de Comunicação Serial (SC-0090-C001)
Diagrama de Estrutura do Produto HM-R120 (PDF)
Detalhes
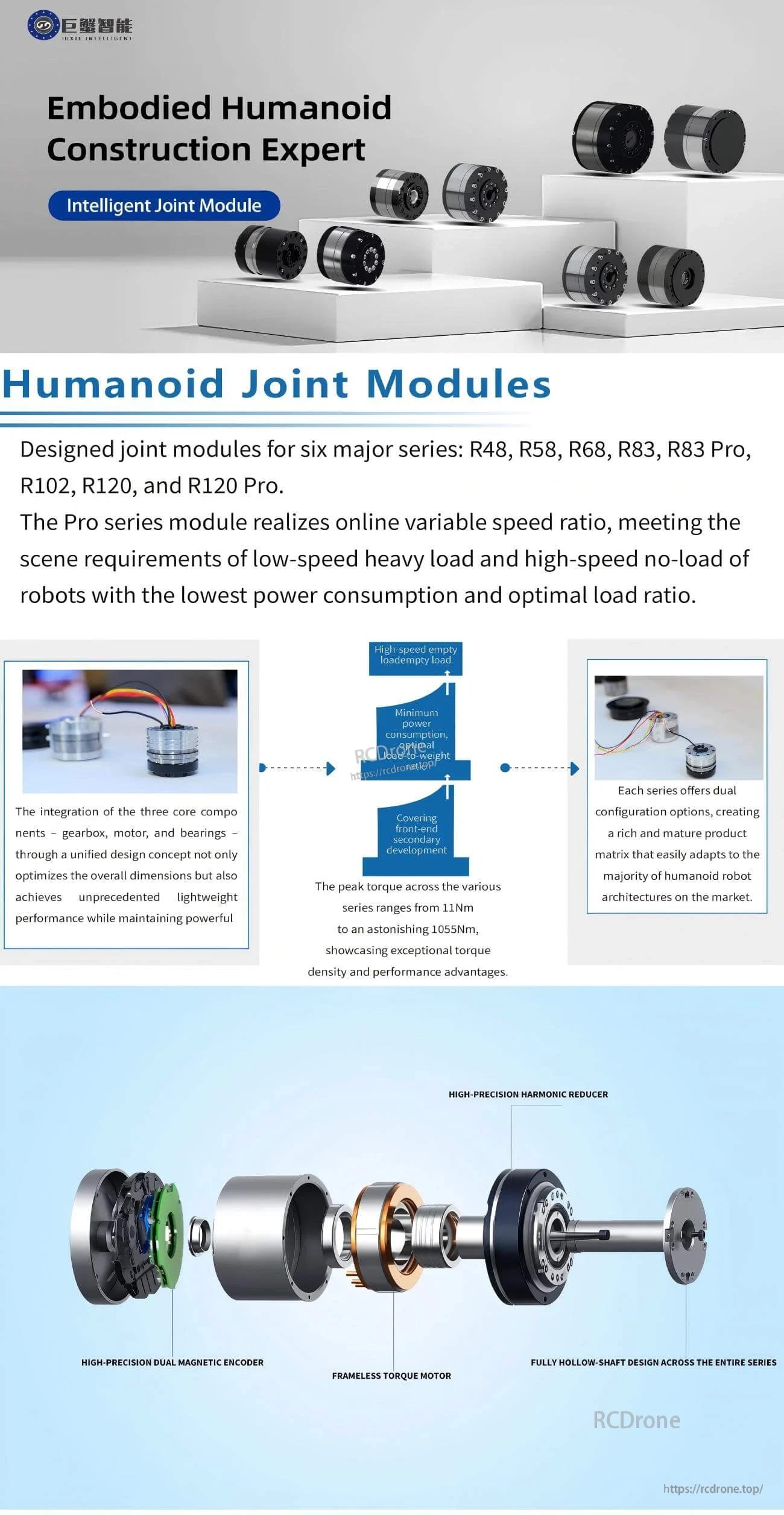
Módulos de articulação humanoide para as séries R48, R58, R68, R83, R83 Pro, R102, R120 e R120 Pro. As características incluem redutor harmônico de alta precisão, encoder magnético duplo, motor de torque sem estrutura e design de eixo totalmente oco.Oferece uma relação de velocidade variável, baixo consumo de energia e alta densidade de torque.


Related Collections

