

JUXIE INTELLIGENT CE-HM-R48 Série 48 V Motor Robô Dual-Encoder 51:1/101:1 EtherCAT/CAN, 0,35 kg, Cabeça/Pulso
JUXIE INTELLIGENT CE-HM-R48 Série 48 V Motor Robô Dual-Encoder 51:1/101:1 EtherCAT/CAN, 0,35 kg, Cabeça/Pulso
JUXIE INTELLIGENT
Não foi possível carregar a disponibilidade de recolha
Visão Geral
A série JUXIE INTELLIGENT CE-HM-R48 é um Motor Robotizado compacto projetado para atuação precisa de articulações. O módulo integra encoders duplos e suporta interfaces EtherCAT/CAN, oferecendo desempenho de baixo retrocesso para articulações de cabeça e pulso, além de um uso mais amplo em robótica humanoide.
Principais Características
- Duas configurações: relações de engrenagem 51:1 e 101:1.
- Encoders duplos com valor absoluto de uma volta: 19 bits por volta.
- Interfaces: EtherCAT/CAN; laço de corrente 50KHz, laço de velocidade 10KHz.
- Baixo retrocesso: 15 arcsec.
- Tensão nominal de 48 V e potência nominal de 32 W.
- Tamanho compacto R48 × 47,5 mm; leve 0,35 kg.
Especificações
| Parâmetro | 51:1 | 101:1 |
|---|---|---|
| Velocidade de Saída (RPM) | 60 | 30 |
| Torque Nominal (Nm) | 3.3 | 6.5 |
| Torque de Pico (Nm) | 8 | 16 |
| Folga (Arcsec) | 15 | 15 |
| Tensão Nominal (V) | 48 | 48 |
| Poder Nominal (W) | 32 | 32 |
| Velocidade Nominal (RPM) | 3000 | 3000 |
| Corrente Nominal (A) | 1.3 | 1.3 |
| Corrente de Pico (A) | 3.3 | 3.3 |
| Dimensões Totais | R48 × 47.5 mm | |
| Peso Total | 0.35 kg | |
| Encoder | Encoders duplos; valor absoluto de uma volta: 19 bits por volta | |
| Driver | Interface: EtherCAT/CAN; laço de corrente: 50KHz; laço de velocidade: 10KHz | |
| Aplicações Típicas | Juntas de Cabeça e Pulso | |
Aplicações
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
Manuais
- Diagrama de Estrutura do Produto HM-R48 (PDF)
- Especificação de Comunicação Serial SC-0090-C001 (PDF)
Detalhes
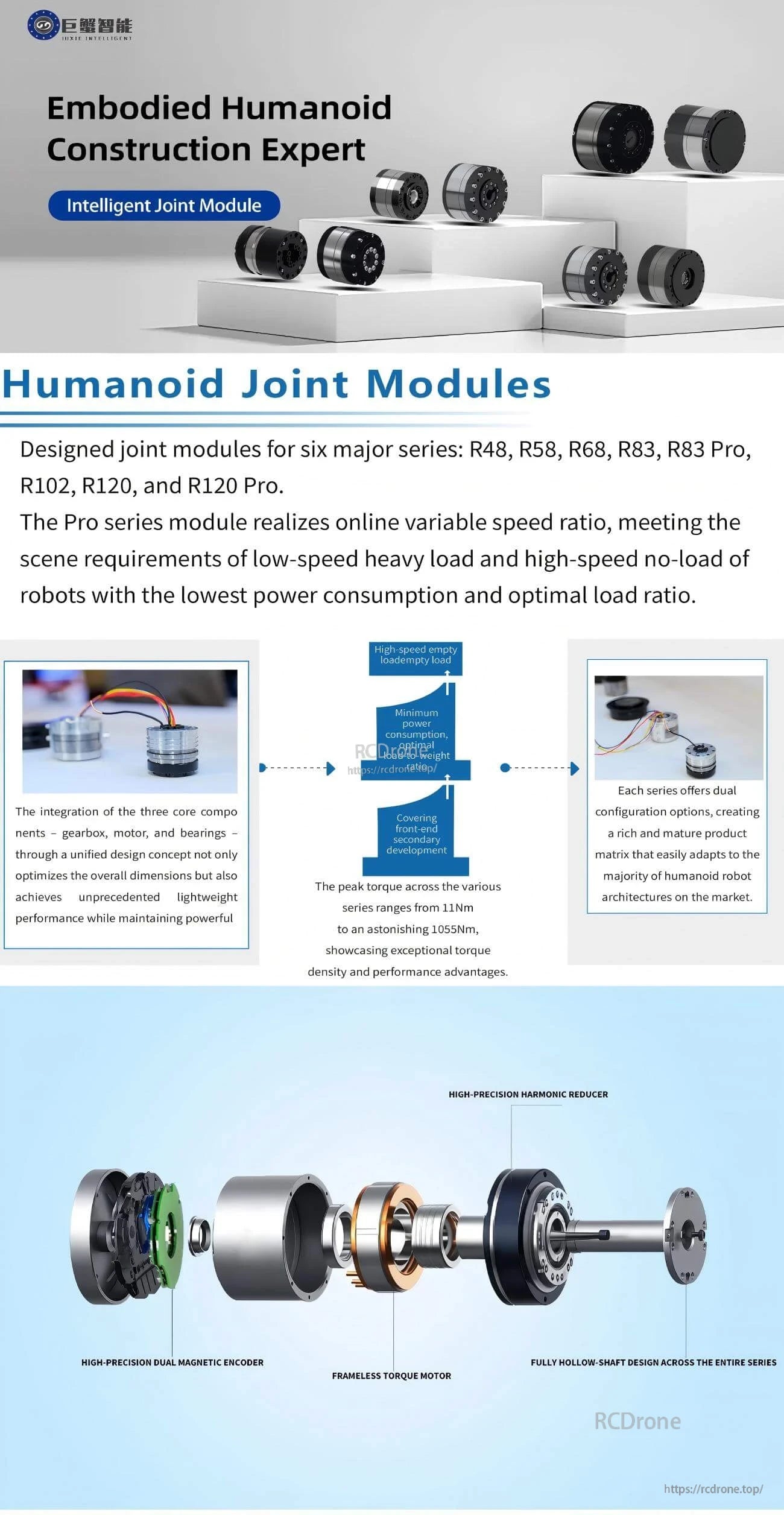
Módulos de junta inteligentes para robôs humanoides, apresentando redutor harmônico de alta precisão, encoder magnético duplo, motor de torque sem estrutura e design de eixo oco.Oferece velocidade variável, baixo consumo de energia e alta densidade de torque em várias séries.
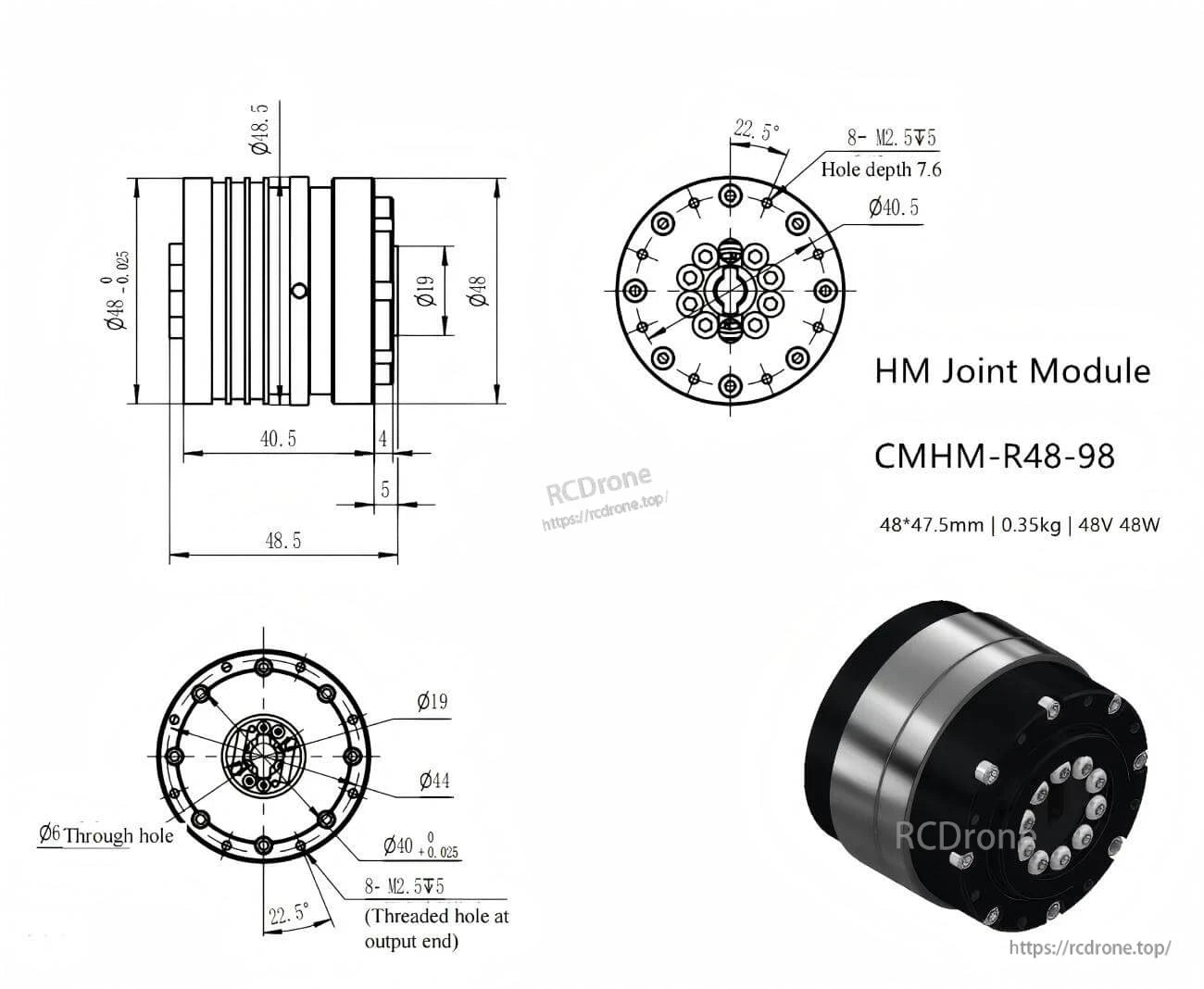
Módulo de Junta HM CMHM-R48-98, 48×47.5mm, 0.35kg, 48V 48W, inclui furos de montagem e dimensões precisas para instalação segura em aplicações de potência compactas.
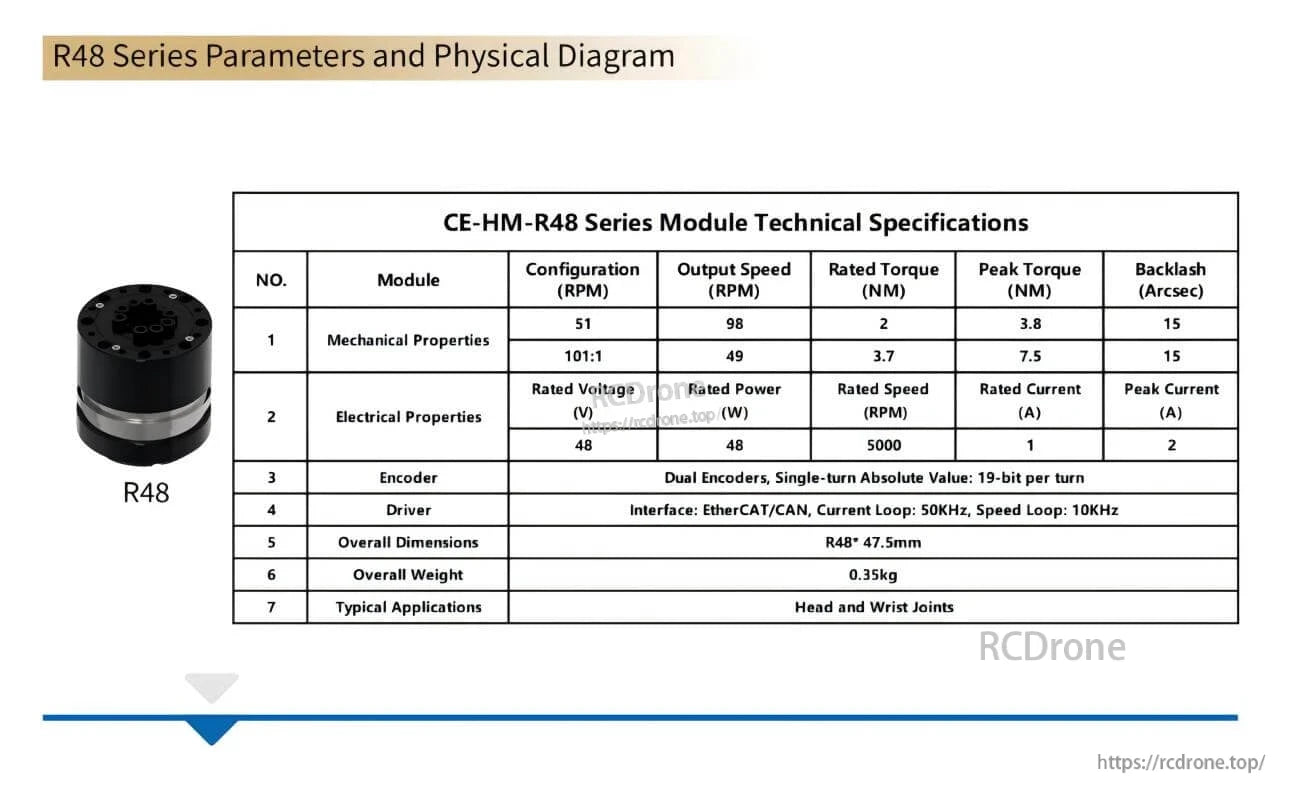
Motor de 48V, 48W com 5000 RPM, torque de 2N·m, encoders duplos de 19 bits, EtherCAT/CAN. Compacto: Ø48×47.5mm, 0.35kg. Ideal para articulações de cabeça e pulso robóticos.
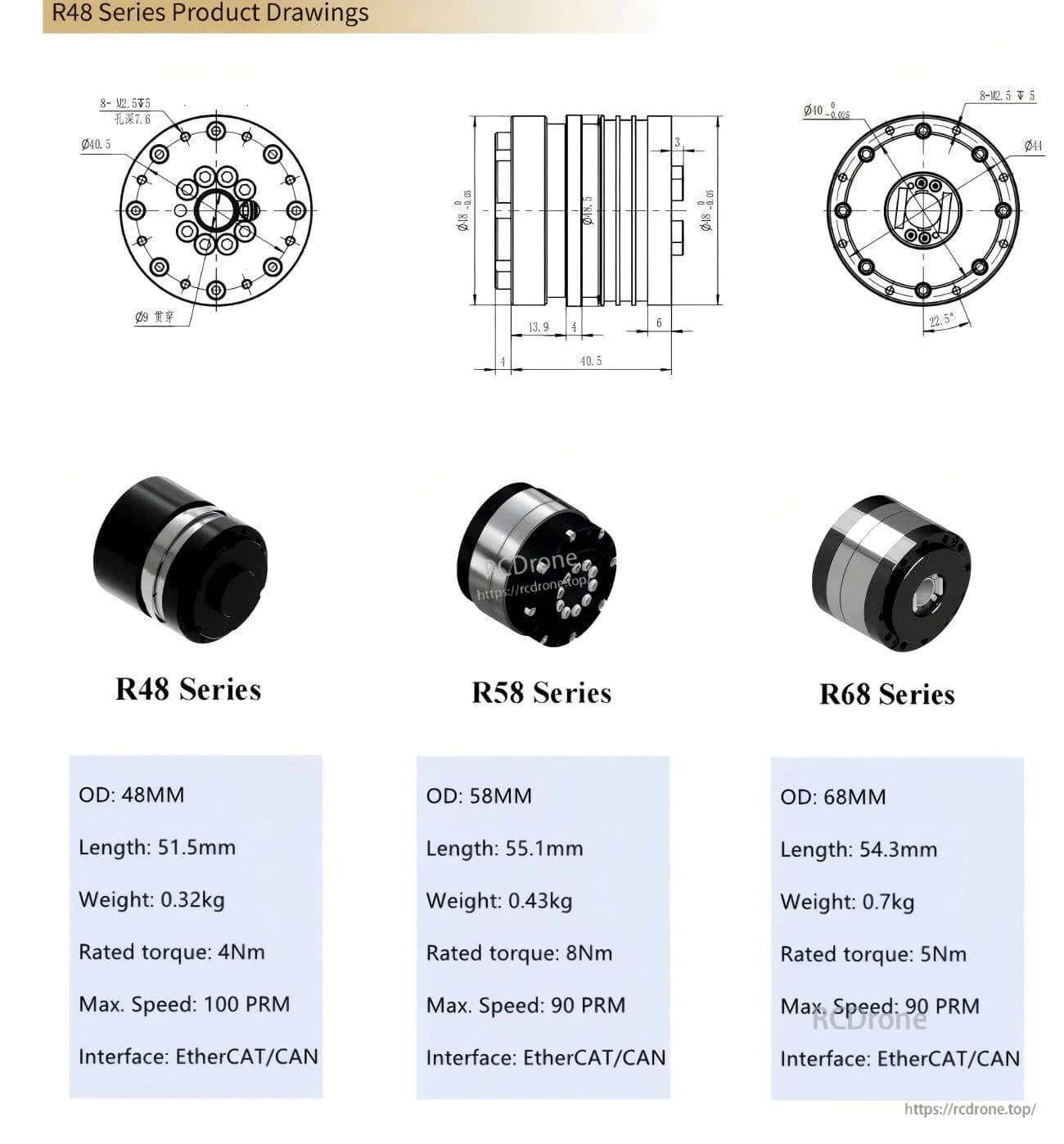
Os motores das séries R48, R58 e R68 apresentam diâmetros externos de 48mm, 58mm e 68mm, comprimentos de 51.5mm a 54.3mm, pesos de 0.32kg a 0.7kg, torques nominais de 4Nm a 8Nm, velocidades máximas de até 100 RPM e interface EtherCAT/CAN.

Related Collections

