

JUXIE INTELLIGENT CE-HM-R58 58 mm, 51:1/101:1, 48 V 95 W, 19-bit Encoders Duplos EtherCAT/CAN Motor para Robô
JUXIE INTELLIGENT CE-HM-R58 58 mm, 51:1/101:1, 48 V 95 W, 19-bit Encoders Duplos EtherCAT/CAN Motor para Robô
JUXIE INTELLIGENT
Não foi possível carregar a disponibilidade de recolha
Visão Geral
A série JUXIE INTELLIGENT CE-HM-R58 é um módulo de junta de motor robótico compacto para robótica humanoide e industrial. O módulo R58 integra um redutor harmónico, um motor de torque sem estrutura e codificadores magnéticos duplos em um design de eixo oco para proporcionar movimento preciso para as articulações da cabeça, pulso e cotovelo. A comunicação e o controle são suportados via EtherCAT ou CAN para fácil integração.
Principais Características
- Redutor harmónico integrado, motor de torque sem estrutura e codificador magnético duplo de alta precisão.
- Design mecânico de eixo oco em toda a série.
- Duas configurações: relação de saída 51:1 e 101:1.
- Velocidade de saída de 60 RPM (51:1) ou 30 RPM (101:1).
- Torque nominal de 10 Nm (51:1) ou 20 Nm (101:1); torque de pico de 25 Nm ou 45 Nm.
- Folga de 15 arcsec.
- Fonte de 48 V, potência nominal de 95 W, velocidade nominal do motor de 3000 RPM.
- Codificadores duplos com valor absoluto de uma volta: 19 bits por volta.
- Interface do driver: EtherCAT/CAN; laço de corrente 50 kHz; laço de velocidade 10 kHz.
- Físicas típicas do módulo R58 mostradas: OD 58 mm, comprimento 55,1 mm, peso 0,43 kg, velocidade máxima 90 RPM, interface EtherCAT/CAN.
Especificações
| Parâmetro | 51:1 | 101:1 |
|---|---|---|
| Configuração | 51:1 | 101:1 |
| Velocidade de Saída (RPM) | 60 | 30 |
| Torque Nominal (Nm) | 10 | 20 |
| Torque de Pico (Nm) | 25 | 45 |
| Folga (Arcsec) | 15 | 15 |
| Tensão Nominal (V) | 48 | 48 |
| Poder Nominal (W) | 95 | 95 |
| Velocidade Nominal (RPM) | 3000 | 3000 |
| Corrente Nominal (A) | 3.5 | 3.5 |
| Corrente de Pico (A) | 10 | 10 |
| Encoder | Encoders duplos; valor absoluto de uma volta: 19 bits por volta | Encoders duplos; valor absoluto de uma volta: 19 bits por volta |
| Driver | Interface: EtherCAT/CAN; loop de corrente: 50 kHz; loop de velocidade: 10 kHz | Interface: EtherCAT/CAN; loop de corrente: 50 kHz; loop de velocidade: 10 kHz |
| Dimensões Gerais | OD 58 mm; comprimento 55.1 mm | OD 58 mm; comprimento 55.1 mm |
| Peso Total | 0.43 kg | 0.43 kg |
| Aplicações Típicas | Juntas da cabeça, punho, junta do cotovelo | Juntas da cabeça, punho, junta do cotovelo |
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
Manuais
- Diagrama de Estrutura do Produto HM-R58 (PDF)
- Especificação de Comunicação Serial SC-0090-C001 (PDF)
Detalhes
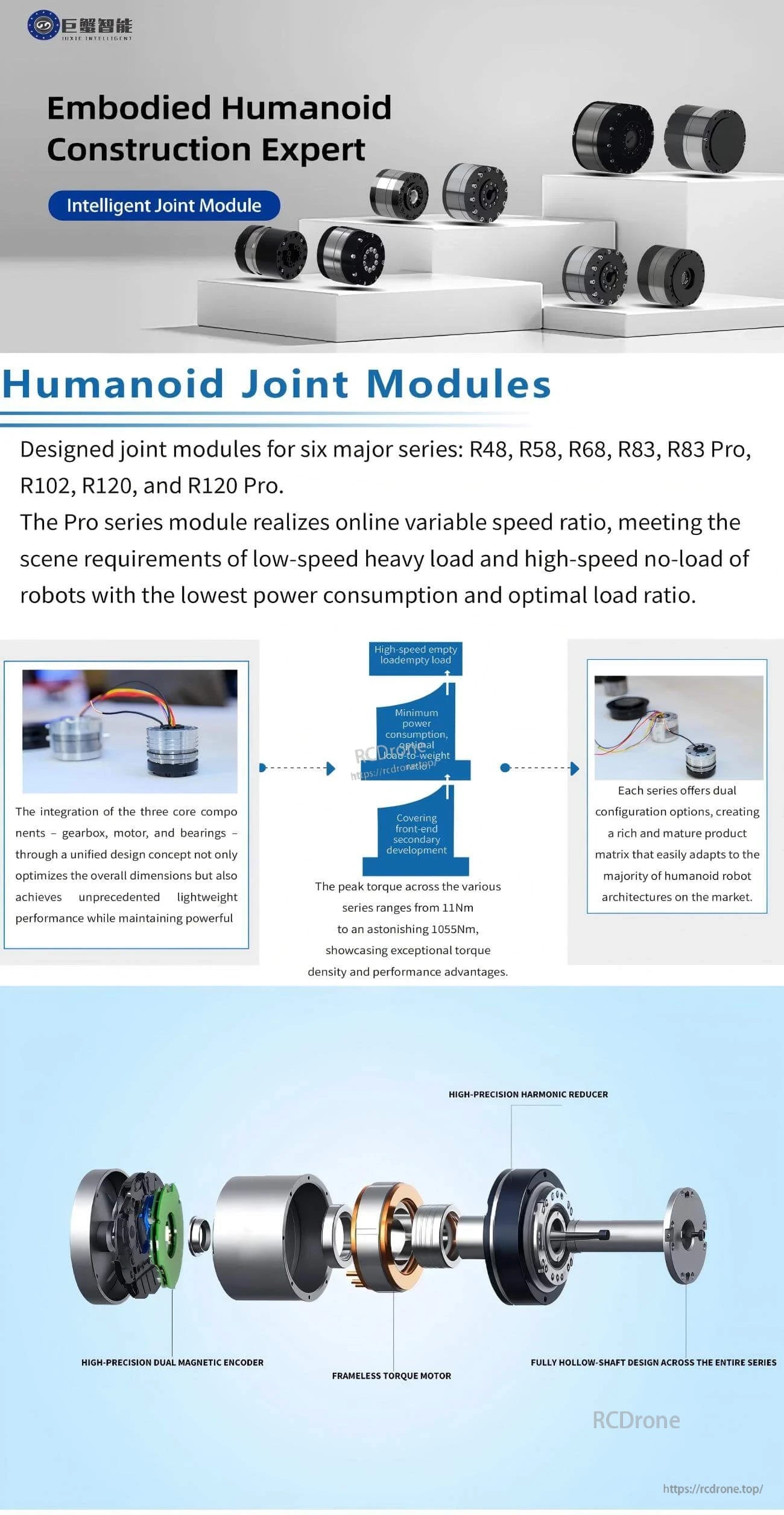
Módulos de junta inteligente para robôs humanoides, apresentando redutor harmônico de alta precisão, encoder magnético duplo, motor de torque sem estrutura e design de eixo oco. Oferece relação de velocidade variável, baixo consumo de energia e torque máximo de até 1055Nm.

Série R48: 48mm OD, 51.5mm de comprimento, 0.32kg, 4Nm de torque, 100 PRM, EtherCAT/CAN. Série R58: 58mm OD, 55.1mm de comprimento, 0.43kg, 8Nm de torque, 90 PRM, EtherCAT/CAN. Série R68: 68mm de diâmetro exterior, 54.3mm de comprimento, 0.7kg, 5Nm de torque, 90 PRM, EtherCAT/CAN.

Related Collections

