

JUXIE INTELLIGENT CE-HM-R68 Série, 48 V 175 W, 51:1/101:1, 17/33 Nm, Motor Robótico de 19 bits com Encoder Duplo para Articulações
JUXIE INTELLIGENT CE-HM-R68 Série, 48 V 175 W, 51:1/101:1, 17/33 Nm, Motor Robótico de 19 bits com Encoder Duplo para Articulações
JUXIE INTELLIGENT
Não foi possível carregar a disponibilidade de recolha
Visão Geral
A série JUXIE INTELLIGENT CE-HM-R68 é um módulo de motor e junta robótica compacto, projetado para robótica humanoide e móvel. Integra um servo motor de 48 V, encoders duplos e relações de engrenagem de 51:1 ou 101:1 para fornecer um torque nominal de até 33 Nm e um torque de pico de até 82 Nm para juntas robóticas.
Principais Características
- Duas configurações: relações de engrenagem de 51:1 e 101:1
- Velocidade de saída nominal: 60 RPM (51:1), 30 RPM (101:1)
- Torque nominal: 17 Nm (51:1), 33 Nm (101:1); torque de pico até 41/82 Nm
- Baixo retrocesso: 15 arcsec
- Servo de 48 V, 175 W com velocidade nominal do motor de 3000 RPM
- Encoders duplos com resolução absoluta de 19 bits de uma volta
- Interfaces: EtherCAT/CAN; laços de controle: corrente 50 kHz, velocidade 10 kHz
- Tamanho compacto R68 x 66,3 mm; peso 0.8 kg
- Adequado para articulações de ombro, cotovelo, joelho e cintura de robôs humanoides
Especificações
| Parâmetro | 51:1 | 101:1 |
|---|---|---|
| Velocidade de saída (RPM) | 60 | 30 |
| Torque nominal (Nm) | 17 | 33 |
| Torque de pico (Nm) | 41 | 82 |
| Folga (arcsec) | 15 | 15 |
| Tensão nominal (V) | 48 | 48 |
| Poder nominal (W) | 175 | 175 |
| Velocidade nominal do motor (RPM) | 3000 | 3000 |
| Corrente nominal (A) | 5.5 | 5.5 |
| Corrente de pico (A) | 16 | 16 |
| Encoder | Encoders duplos; absoluto de uma volta 19 bits | |
| Interface do driver | EtherCAT/CAN | |
| Laços de controle | Laço de corrente 50 kHz; laço de velocidade 10 kHz | |
| Dimensões totais | R68 x 66.3 mm | |
| Peso total | 0.8 kg | |
| Aplicações típicas de juntas | Ombro, Cotovelo, Joelho, Cintura | |
Aplicações
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
Manuais
- Diagrama de Estrutura do Produto HM-R68 (PDF)
- Especificação de Comunicação Serial SC-0090-C001 (PDF)
Detalhes
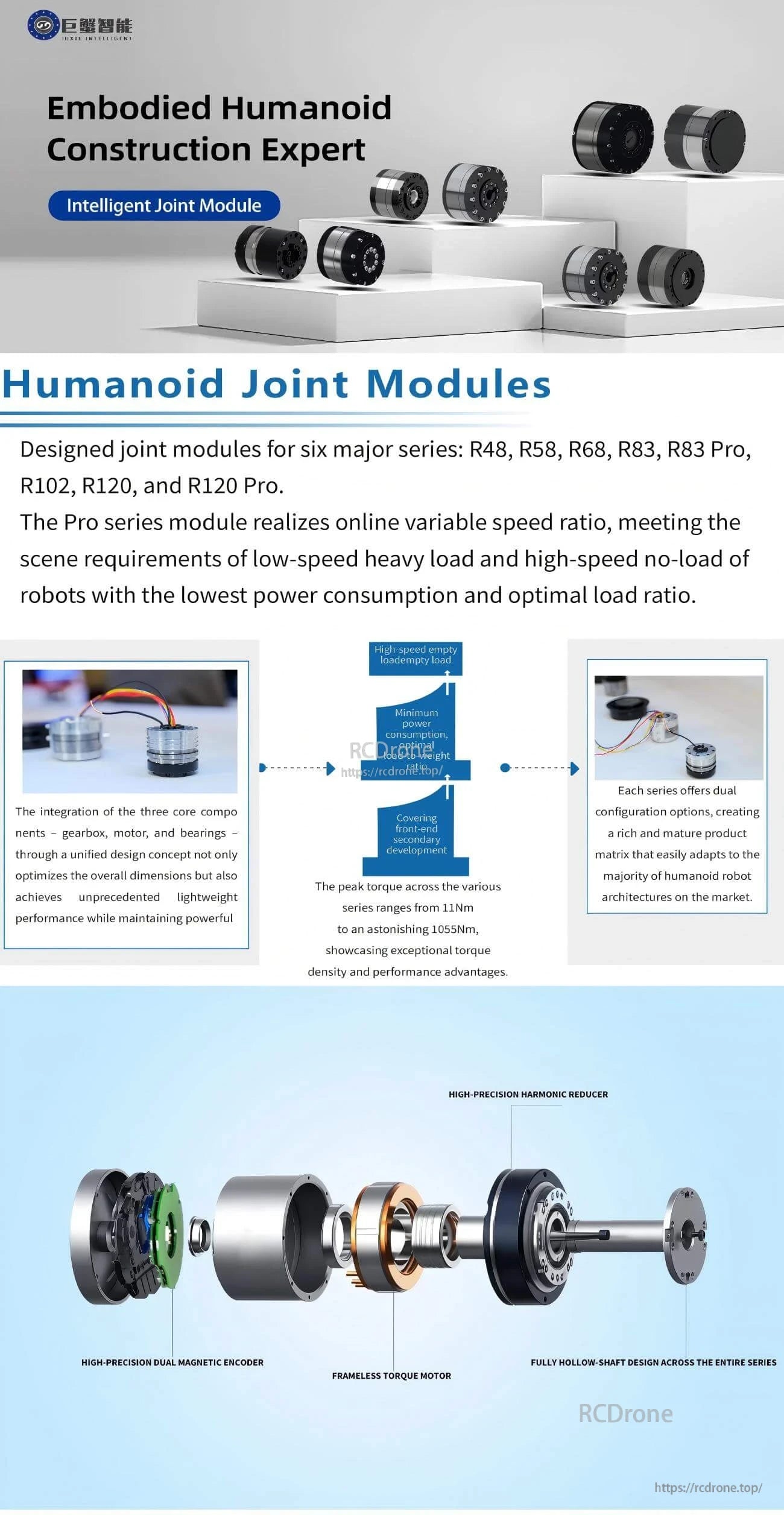
Módulos de juntas humanoides para as séries R48, R58, R68, R83, R83 Pro, R102, R120 e R120 Pro. As características incluem redutor harmônico de alta precisão, encoder magnético duplo, motor de torque sem estrutura e design de eixo totalmente oco. Oferece relação de velocidade variável, baixo consumo de energia e alta densidade de torque.

Série de motores de robô três: R48 (48mm OD, 4Nm de torque, 100 PRM), R58 (58mm OD, 8Nm de torque, 90 PRM), R68 (68mm OD, 5Nm de torque, 90 PRM). Todos apresentam interface EtherCAT/CAN.

Related Collections

