

JUXIE INTELLIGENT CE-HM-R83 Série, 48 V 250 W, 51:1/101:1/161:1, Motor Robótico com Encoders Duplos de 19 bits para Articulações Humanóides
JUXIE INTELLIGENT CE-HM-R83 Série, 48 V 250 W, 51:1/101:1/161:1, Motor Robótico com Encoders Duplos de 19 bits para Articulações Humanóides
JUXIE INTELLIGENT
Não foi possível carregar a disponibilidade de recolha
Visão Geral
A série JUXIE INTELLIGENT CE-HM-R83 é um módulo de motor robótico e articulação integrado para robótica humanoide e móvel. Combina um redutor harmónico de alta precisão, um motor de torque sem estrutura e encoders magnéticos duplos em um formato compacto R83. Três configurações (51:1, 101:1, 161:1) fornecem torque nominal de até 84 Nm com um retrocesso de 15 arcsec. O driver embutido suporta EtherCAT/CAN com um loop de corrente de 50KHz e um loop de velocidade de 10KHz. O uso típico inclui articulações de ombro, cotovelo, joelho e cintura. As dimensões gerais são R83*59mm e o peso é de 1.1kg.
Principais Características
- Redutor harmónico integrado + motor de torque sem estrutura + encoder magnético duplo de alta precisão.
- Encoders duplos com valor absoluto de uma volta: 19 bits por volta.
- Relações de engrenagem: 51:1, 101:1, 161:1; torque nominal 27/53/84 Nm, torque de pico 66/120/200 Nm.
- Retrocesso: 15 arcsec em todas as configurações.
- Avaliações elétricas: 48 V, 250 W, velocidade nominal 3000 RPM, corrente nominal 6 A, corrente de pico 16 A.
- Interface do driver: EtherCAT/CAN; laço de corrente 50KHz; laço de velocidade 10KHz.
- Compacto e leve: R83*59mm, 1.1kg; design de eixo oco.
Especificações
| Parâmetro | 51:1 | 101:1 | 161:1 |
|---|---|---|---|
| Velocidade de Saída (RPM) | 60 | 30 | 18 |
| Torque Nominal (Nm) | 27 | 53 | 84 |
| Torque de Pico (Nm) | 66 | 120 | 200 |
| Folga (Arcsec) | 15 | 15 | 15 |
| Tensão Nominal (V) | 48 | 48 | 48 |
| Potência Nominal (W) | 250 | 250 | 250 |
| Velocidade Nominal (RPM) | 3000 | 3000 | 3000 |
| Corrente Nominal (A) | 6 | 6 | 6 |
| Peak Current (A) | 16 | 16 | 16 |
| Encoder | Encoders duplos; valor absoluto de uma volta: 19 bits por volta | Encoders duplos; valor absoluto de uma volta: 19 bits por volta | Encoders duplos; valor absoluto de uma volta: 19 bits por volta |
| Driver | Interface: EtherCAT/CAN; Laço de corrente: 50KHz; Laço de velocidade: 10KHz | Interface: EtherCAT/CAN; Laço de corrente: 50KHz; Laço de velocidade: 10KHz | Interface: EtherCAT/CAN; Laço de corrente: 50KHz; Laço de velocidade: 10KHz |
| Dimensões Gerais | R83*59mm | R83*59mm | R83*59mm |
| Peso Total | 1.1kg | 1.1kg | 1.1kg |
| Aplicações Típicas | articulação do ombro, articulação do cotovelo, articulação do joelho, articulação da cintura. | articulação do ombro, articulação do cotovelo, articulação do joelho, articulação da cintura. | articulação do ombro, articulação do cotovelo, articulação do joelho, articulação da cintura. |
Aplicações
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
Manuais
- Diagrama de Estrutura do Produto HM-R83 (PDF)
- Especificação de Comunicação Serial SC-0090-C001 (PDF)
Detalhes
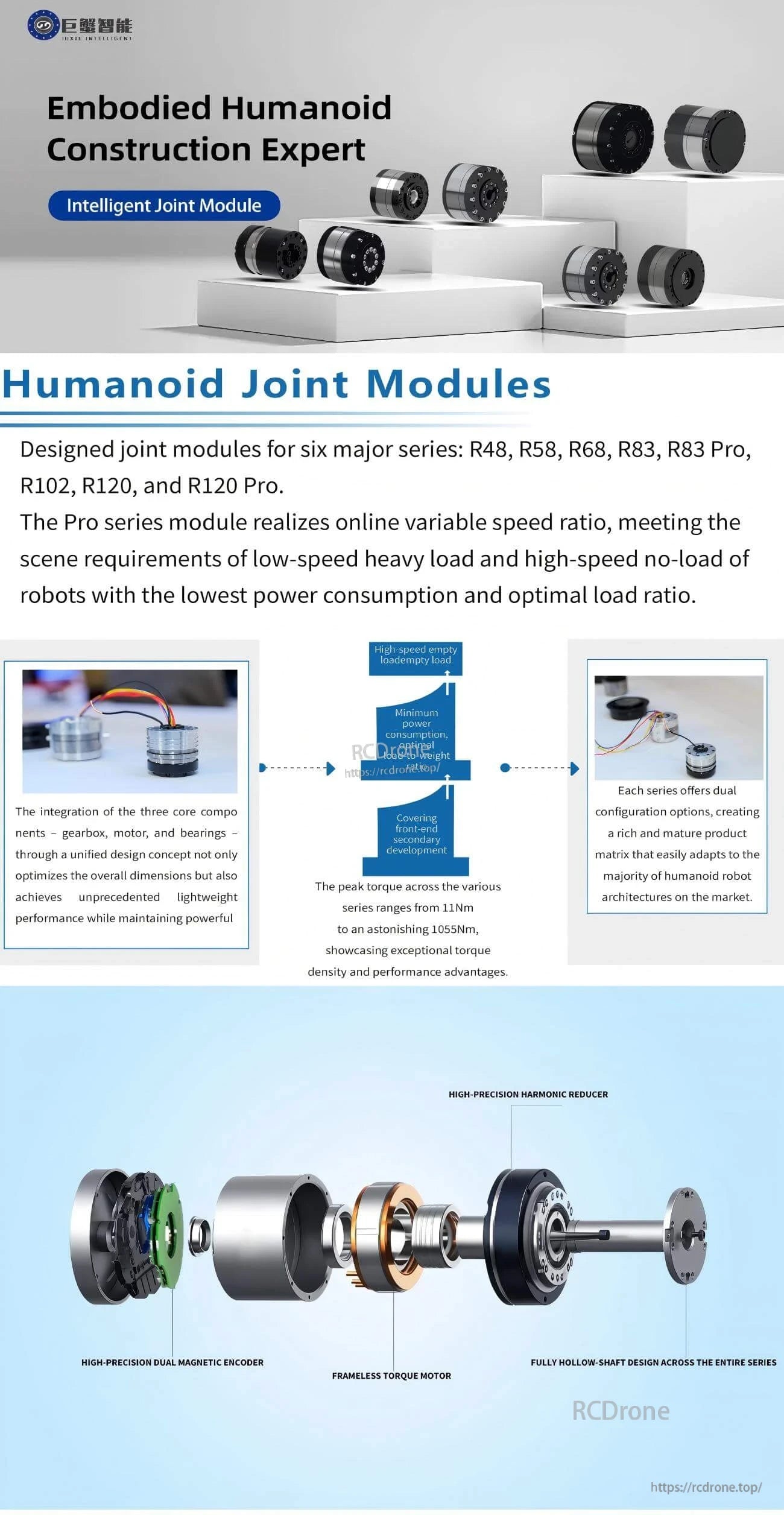
Módulos de junta inteligentes para robôs humanoides, com redutor harmônico de alta precisão, encoder magnético duplo, motor de torque sem estrutura e design de eixo oco. Oferece velocidade variável, baixo consumo de energia e torque máximo de até 1055Nm.

Related Collections

