













LINKERBOT Mão Robótica Linker Hand L10, 10 DoF, Controlo CAN/RS485, Transmissão por Parafuso Sem-fim, Força de Aperto 80N, DC24V+/-10%
LINKERBOT Mão Robótica Linker Hand L10, 10 DoF, Controlo CAN/RS485, Transmissão por Parafuso Sem-fim, Força de Aperto 80N, DC24V+/-10%
LINKERBOT
Não foi possível carregar a disponibilidade de recolha
Visão Geral
LINKERBOT A Mão Robótica Linker Hand L10 é uma Mão Robótica projetada para manipulação ágil e controle preciso. Possui 10 graus de liberdade com transmissão por engrenagem de verme e comunica-se via CAN/RS485 para uma integração fiável em sistemas de pesquisa e industriais.
Principais Características
- Mão ágil com 10 DoF e transmissão por engrenagem de verme para atuação estável.
- Interfaces de controlo: CAN e RS485.
- Precisão de posicionamento repetido < +/-0.2mm; tempo típico de abertura/fecho 1.2s.
- Capacidade de força: 15N de força máxima na ponta do polegar, 15N de força máxima na ponta dos quatro dedos, 80N de força máxima de agarre com cinco dedos.
- Modos de controlo e utilitários do manual do produto: controlo de posição, controlo de velocidade, feedback háptico (controlo de força) via sensores de ponta dos dedos, e atualização de firmware online.
- Ecosistema (por materiais do produto): braços robóticos suportados UR, Franka, XArm, RealMan, AgileX; simuladores suportados Pybullet, Isaac, MuJoCo; exemplos de uso incluem ROS1, ROS2, Python, C++; métodos de aquisição de dados incluem luvas de teleoperação, luvas de exoesqueleto, luvas de detecção de metal líquido, visão e VR (Meta Quest 3).
Para suporte pré-venda ou de integração, contacte [email protected] or visite https://rcdrone.top/.
Especificações
| Graus de Liberdade (DoF) | 10 |
| Número de Juntas | 20 (10 Ativas + 10 Passivas) |
| Modo de Transmissão | Transmissão por Engrenagem de Rosca |
| Interface de Controlo | CAN/RS485 |
| Peso | 800g |
| Carga Máxima | 25kg |
| Tensão de Funcionamento | DC24V+/-10% |
| Corrente Estática | 0.2A |
| Corrente Média (Movimento Sem Carga) | 0.5A |
| Corrente Máxima | 3A |
| Precisão de Repetição de Posicionamento | < +/-0.2mm |
| Tempo de Abertura/Fecho | 1.2s |
| Força Máxima do Dedo Polegar | 15N |
| Força Máxima dos Dedos Quatro | 15N |
| Força Máxima de Agarre com Cinco Dedos | 80N |
Sensor de Pressão
| Array Piezoresistivo | 6*12 |
| Área de Suporte de Força do Sensor | 9.6*14.4mm |
| Força de Gatilho | 5g |
| Intervalo de Medição | 20N |
| Vida Útil | 100.000 Ciclos |
| Taxa de Comunicação | 200FPS |
Sensor Capacitivo (Opcional)
| Frequência de Amostragem | >=50Hz |
| Intervalo de Medição | 0-30N |
| Limite de Sobrecarga | 60N |
| sensibilidade à Pressão | 0.1N |
| Resolução de Medição | 0.5%FS |
| Precisão de Medição | 2%FS |
| Resolução de Pressão | 0.25N |
| Resolução de Direção | 45° |
| Distância de Detecção | 1cm (Metal, Corpo Humano) |
O que está incluído
- Cabo de Depuração USB para CAN x1
- Cabo Conector XT30 (2+2) x1
- Adaptador de Energia x1
- Cabo de Energia x1
- Linker Hand L10 x1
Aplicações
- Pesquisa e educação em manipulação destroça usando ROS1/ROS2 e simuladores (Pybullet, Isaac, MuJoCo).
- Teleoperação via luvas, luvas de exoesqueleto, luvas de detecção de metal líquido, visão e VR (Meta Quest 3).
- Montagem de precisão, operações baseadas em caminho, aperto de parafusos, agarre de folhas finas e manuseio geral de objetos.
Manuais
Linker_Hand_L10_Product_Manual.pdf
Detalhes

A Linker Hand L10 oferece 10 DOF, movimento preciso através de um mecanismo de ligação e drivers de motor personalizados. Suporta UR, Franka, ROS, Python, VR, Pybullet, CAN, e mais para integração e controle robótico versátil.
A Linker Hand L10 proporciona alta destreza, com cada dedo oferecendo 4 graus de liberdade para operações precisas. Seu sistema multi-sensor—equipado com câmaras e pele eletrónica—oferece uma consciência ambiental abrangente e interação adaptativa. Através da integração em nuvem, os utilizadores podem implantar rapidamente a mão através de um serviço de biblioteca de habilidades sem código, permitindo uma personalização eficiente enquanto reduz a complexidade operacional. Juntas, essas capacidades suportam uma ampla gama de aplicações complexas, melhorando tanto a precisão quanto a facilidade de uso sem exigir programação ou configuração extensiva.

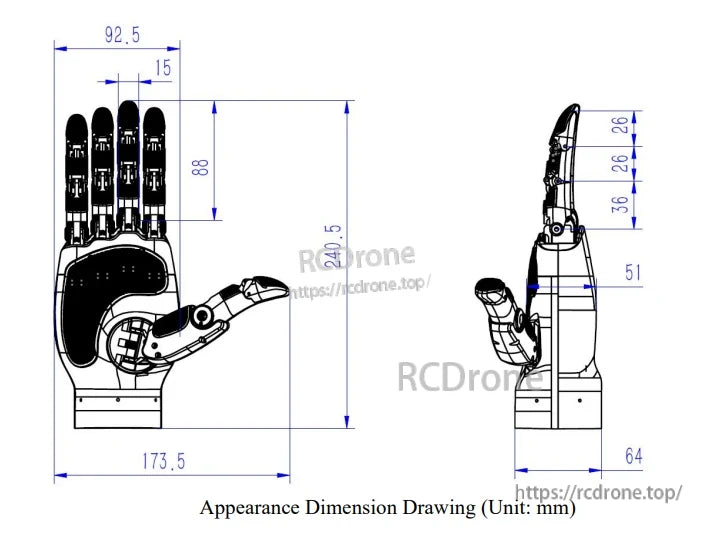
Dimensões da mão robótica em milímetros, mostrando vistas frontal e lateral com medições precisas para design e montagem.
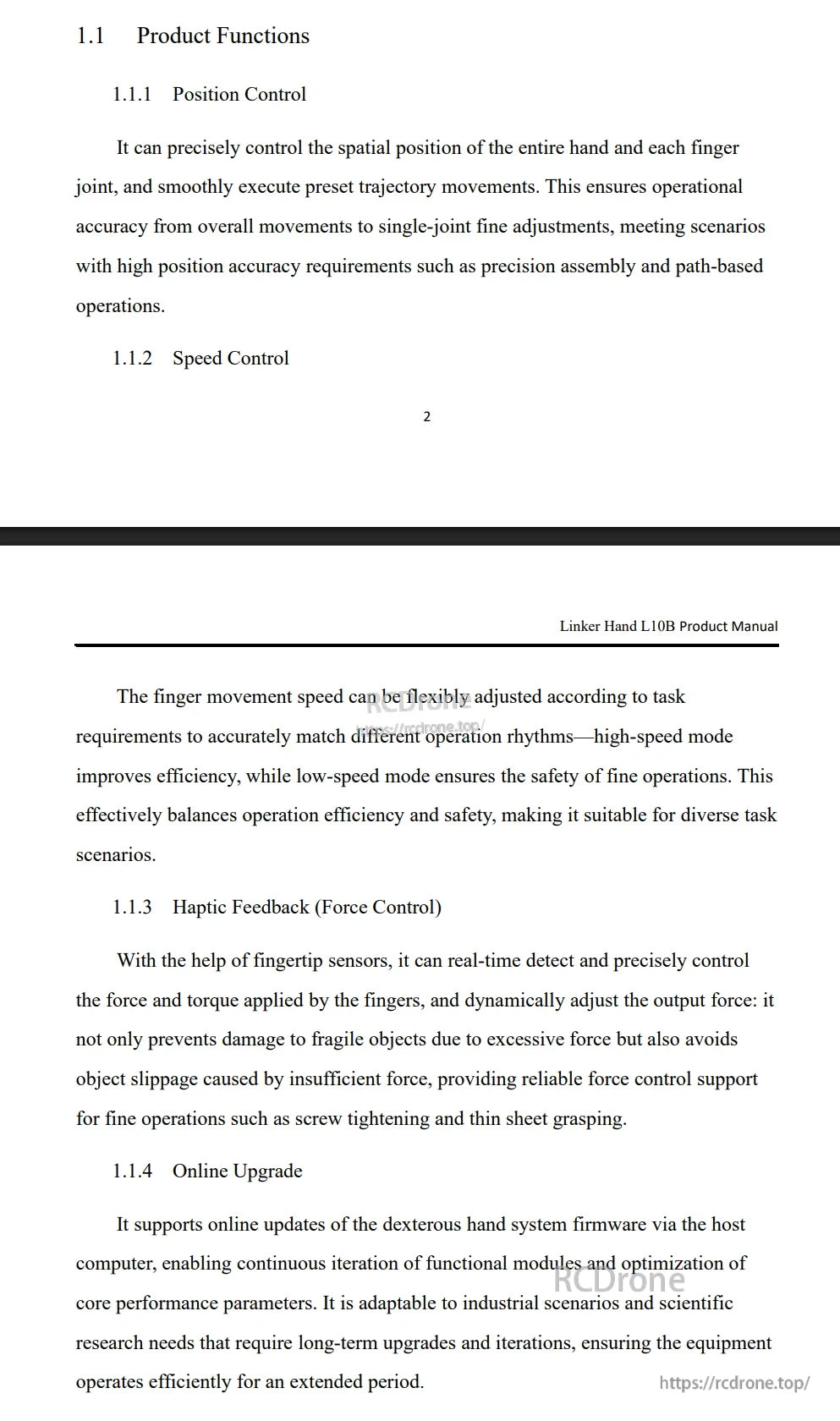
A Mão Linker L10B oferece controlo preciso de posição e velocidade, feedback háptico para gestão de força e atualizações de firmware online. Projetada para precisão, segurança e adaptabilidade em aplicações industriais e de pesquisa que requerem manipulação fina e desempenho a longo prazo.
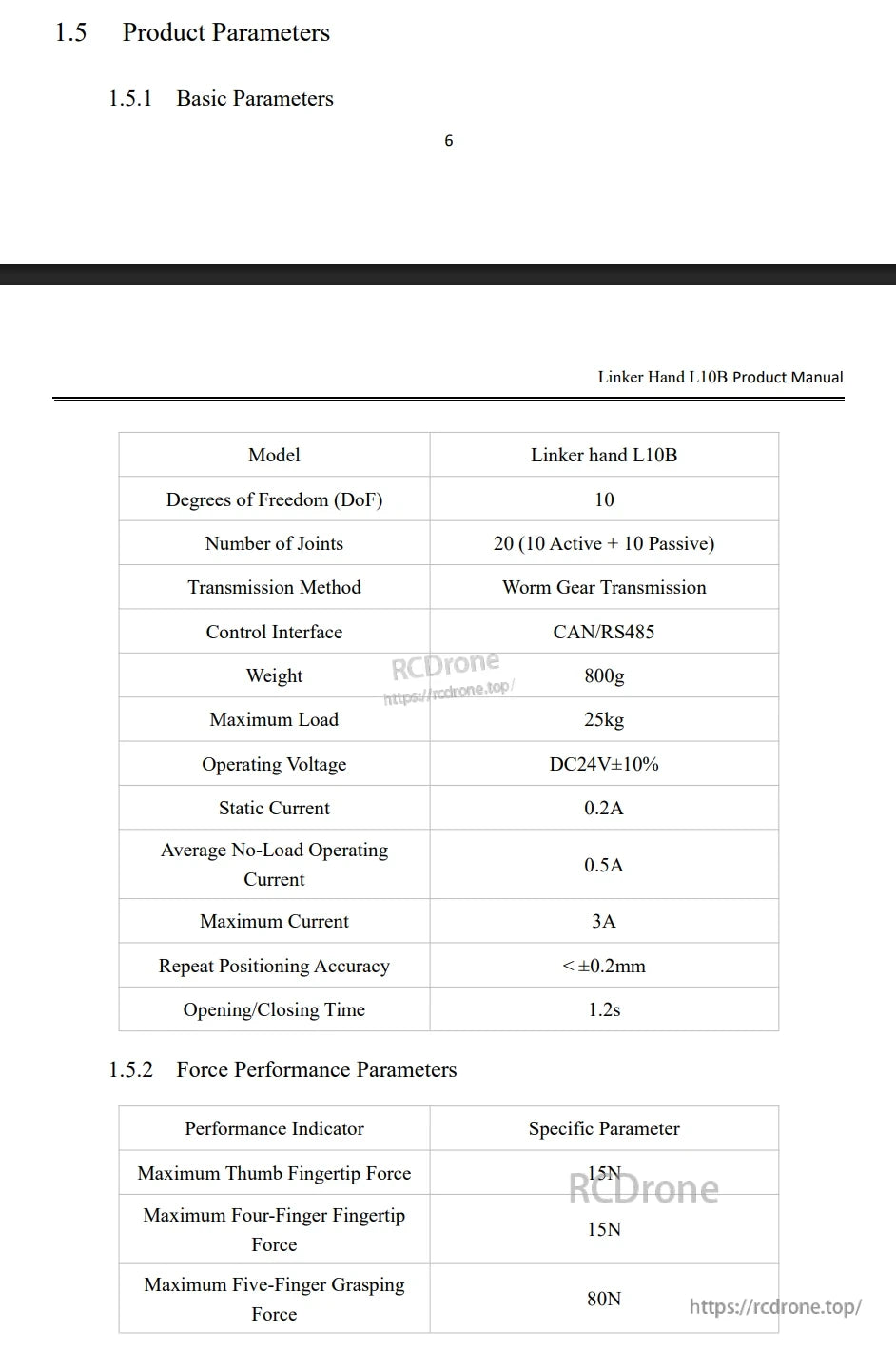
A Mão Linker L10B oferece 10 DoF, 20 articulações, transmissão por engrenagem de verme e controlo CAN/RS485. Pesando 800g, suporta até 25kg a DC24V, proporcionando posicionamento preciso e forças de agarre de até 80N.

Apresenta uma matriz piezorresistiva 6x12 (faixa de 20N, 100k ciclos). Sensor capacitivo opcional: ≥50Hz de amostragem, faixa de 0–30N, resolução de direção de 45°, detecta metal ou corpo humano a 1cm.
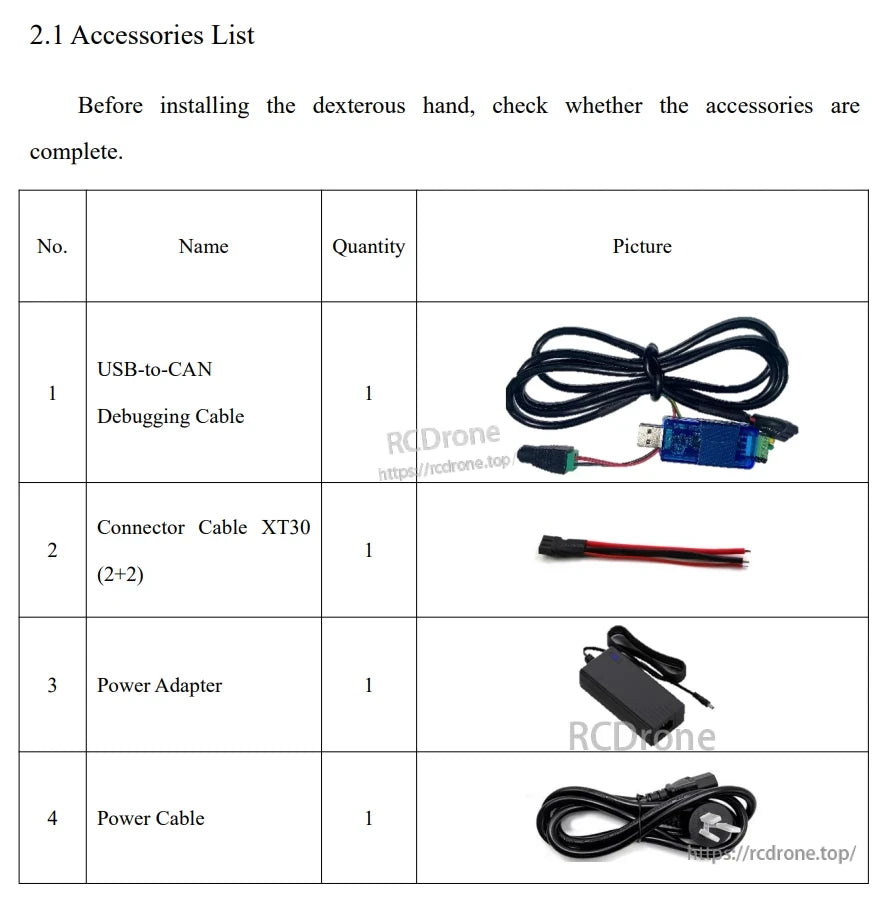
Lista de acessórios para instalação da mão destro: cabo USB-para-CAN, conector XT30, adaptador de energia e cabo de energia, cada um com quantidade um.
Related Collections













