







LINKERBOT Mão Robótica Linker Hand L6, 6 DoF, CAN, Transmissão por Ligação, Força de Aperto 50N, Repetibilidade ±0,2mm
LINKERBOT Mão Robótica Linker Hand L6, 6 DoF, CAN, Transmissão por Ligação, Força de Aperto 50N, Repetibilidade ±0,2mm
LINKERBOT
Não foi possível carregar a disponibilidade de recolha
Visão Geral
LINKERBOT A Mão Linker L6 é uma Mão Robótica ágil projetada para manipulação precisa. Possui 6 graus de liberdade (DoF) e 11 articulações (6 ativas + 5 passivas) com uma transmissão por ligação e interface de controlo CAN. A estrutura mostrada nas imagens do produto destaca dedos totalmente metálicos, silicone resistente ao desgaste nas pontas dos dedos, sensores de pressão tátil de cinco dedos, luzes indicadoras, um pad de borracha anti-esmagamento na metade da palma e um cilindro elétrico de alta precisão com acionamento direto.
Principais Características
- Manipulação ágil com 6 DoF; 11 articulações (6 ativas + 5 passivas).
- Transmissão por ligação com controlo via bus CAN.
- Precisão de posicionamento repetido: ±0.2mm.
- Capacidade de força: força máxima de ponta do polegar 10N; força máxima de ponta dos quatro dedos 8N; força máxima de agarre com cinco dedos 50N.
- Array de sensores táteis piezorresistivos de cinco dedos para medição de contacto/pressão.
- Elementos de design mostrados: dedos totalmente metálicos, pontas de silicone resistentes ao desgaste, luz indicadora, almofada de borracha anti-esmagamento.
- Layout compacto & ágil; sistema multi-sensor (incluindo câmaras e pele eletrónica) e integração dispositivo-nuvem conforme ilustrado nas imagens do produto.
Para vendas e suporte técnico, contacte [email protected] or visite https://rcdrone.top/.
Especificações
| Parâmetro | Valor |
|---|---|
| Graus de Liberdade (DoF) | 6 |
| Número de Juntas | 11 (6 Ativas + 5 Passivas) |
| Modo de Transmissão | Transmissão por Ligação |
| Interface de Controle | CAN |
| Peso | 623.5g |
| Carga Máxima | 28kg |
| Tensão de Operação | DC24V±10% |
| Corrente Estática | 0.2A |
| Corrente Média (Movimento Sem Carga) | 0.75A |
| Corrente Máxima | 1.4A |
| Precisão de Repetição de Posicionamento | ±0.2mm |
| Força Máxima da Ponta do Polegar | 10N |
| Força Máxima da Ponta dos Quatro Dedos | 8N |
| Força Máxima de Aperto dos Cinco Dedos | 50N |
Desempenho de Movimento
| Parte em Movimento | Intervalo de Ângulo (°) | Velocidade de Movimento (°/s) |
|---|---|---|
| Base do Polegar | 57 | 152.82 |
| Base do Dedo Indicador | 72.30 | 213.27 |
| Base do Dedo Médio | 72.90 | 208.29 |
| Base do Dedo Anelar | 73.10 | 202.49 |
| Base do Dedo Mínimo | 72.60 | 201.11 |
| Ponta do Polegar | 69.90 | 192.84 |
| Ponta do Dedo Indicador | 64.60 | 192.84 |
| Ponta do Dedo Médio | 65.10 | 185.32 |
| Ponta do Dedo Anelar | 66.90 | 185.32 |
| Ponta do Dedo Mínimo | 66.70 | 184.76 |
| Movimento Lateral do Polegar | 80 | 235.29 |
| Horário de Abertura e Fecho | - | 0.35s |
Sensores
| Parâmetro | Especificação |
|---|---|
| Array Piezoresistivo | 6*12 |
| Área de Suporte de Força do Sensor | 9.6*14.4mm |
| Força de Gatilho | 5g |
| Intervalo de Medição | 20N |
| Vida Útil | 100.000 Ciclos |
| Taxa de Comunicação | 200FPS |
| Intervalo de Valores | 0~4095 |
Dimensões de Aparência
| Definição | Parâmetro (mm) |
|---|---|
| Comprimento da ponta do dedo médio até a base da palma | 190.7 |
| Largura máxima da palma | 121 |
| Comprimento da ponta do polegar até a base da palma | 134.3 |
| Altura do pulso | 9.5 |
| Diâmetro do pulso | 60 |
O que está incluído
- Cabo de depuração USB‑para‑CAN x1
- Cabo de conector XT30 (2+2) x1
- Adaptador de energia x1
- Cabo de energia x1
- Linker Hand L6 x1
Aplicações
- Agarramento preciso e manuseio de objetos
- Agarramento e manipulação de ferramentas
- Tarefas de pick-and-place de componentes
Manuais
Manual do Produto Linker Hand L6 (PDF)
Detalhes


Mão robótica destroça de alto desempenho com 6 graus de liberdade. Apresenta agilidade compacta, sistema multi-sensor e integração dispositivo-nuvem para controle preciso, adaptação ao ambiente e personalização sem código através da biblioteca de habilidades na nuvem.



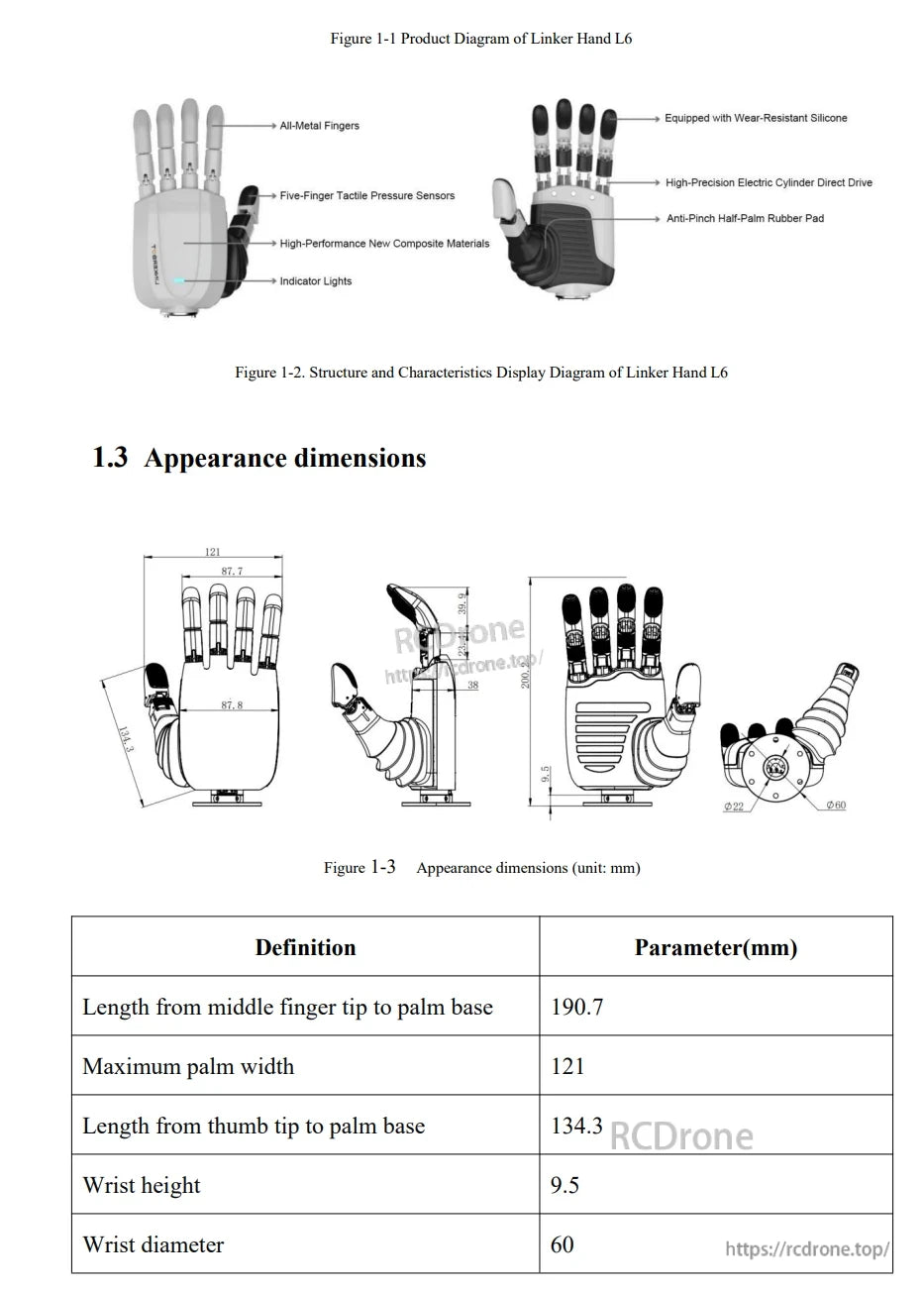
A mão Linker L6 possui dedos totalmente metálicos, sensores táteis, silicone resistente ao desgaste, acionamento por cilindro elétrico e almofada de borracha anti-pinch. Comprimento do dedo: 190,7 mm; largura da palma: 121 mm; diâmetro do pulso: 60 mm.
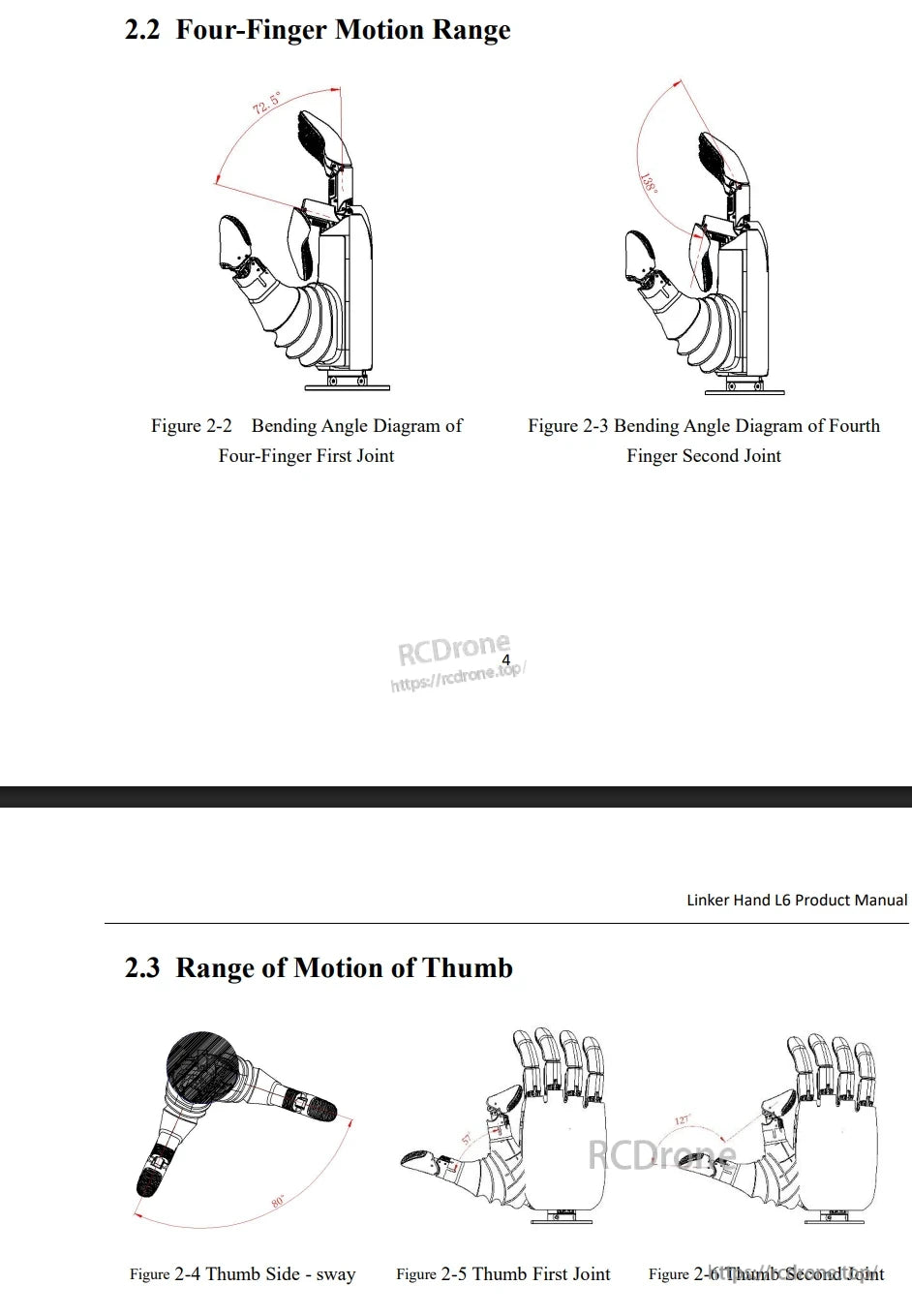
Faixas de movimento das articulações do dedo e do polegar: primeira articulação do dedo indicador 72,5°, segunda articulação 138°; movimento lateral do polegar 80°, primeira articulação 57°, segunda articulação 127°.
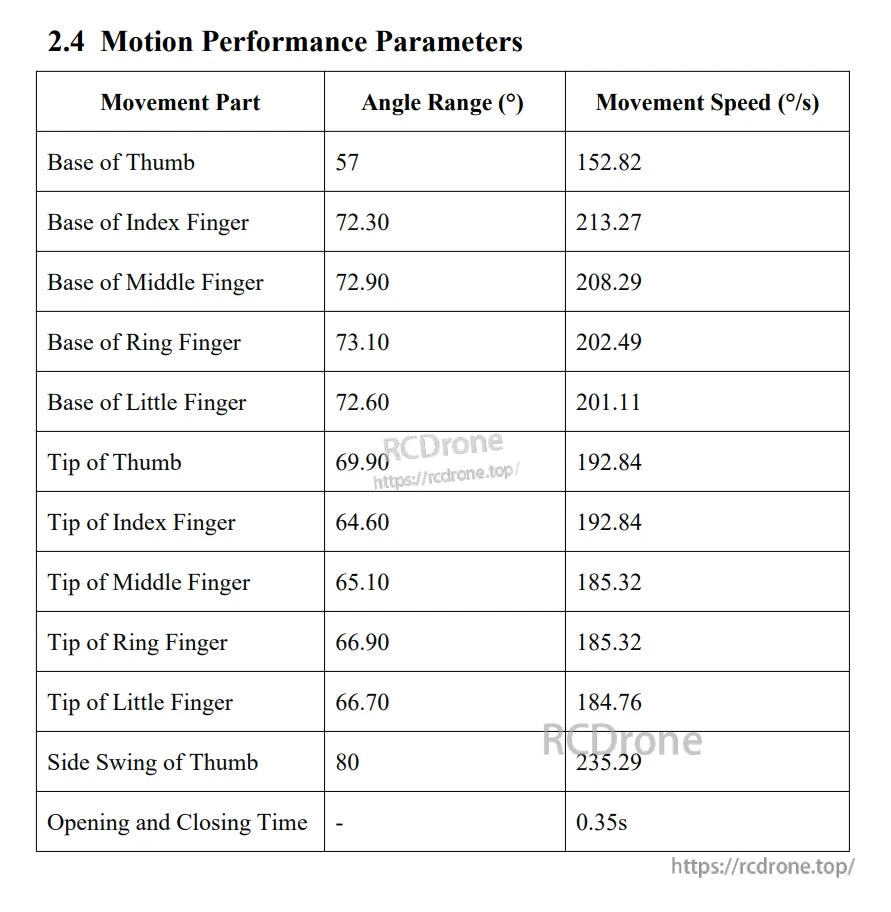
Parâmetros de movimento dos dedos da mão robótica: oscilação do polegar a 235,29°/s, abertura/fechamento em 0,35 segundos—demonstrando articulação precisa com faixas de ângulo de articulação e velocidades detalhadas.
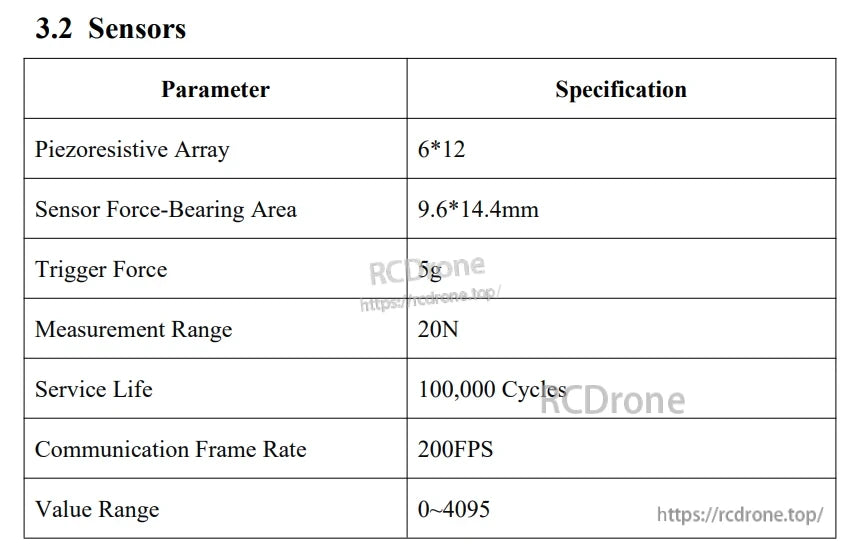
Especificações do sensor: matriz 6x12, área de 9,6x14,4 mm, disparo de 5g, faixa de 20N, 100k ciclos, 200FPS, faixa de valores de 0-4095.
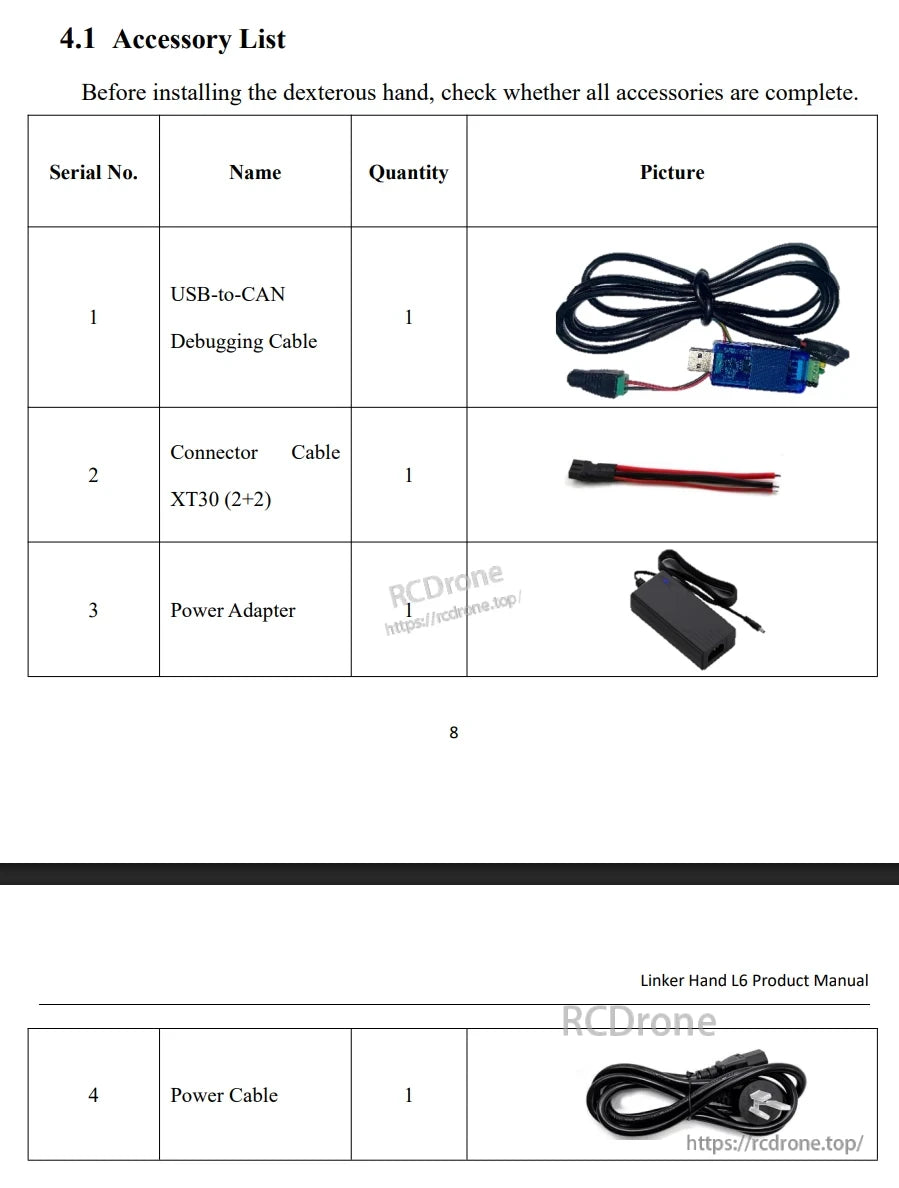
Lista de acessórios para a mão Linker L6: cabo USB para CAN, conector XT30, adaptador de energia e cabo de energia. Verifique a completude antes da instalação.
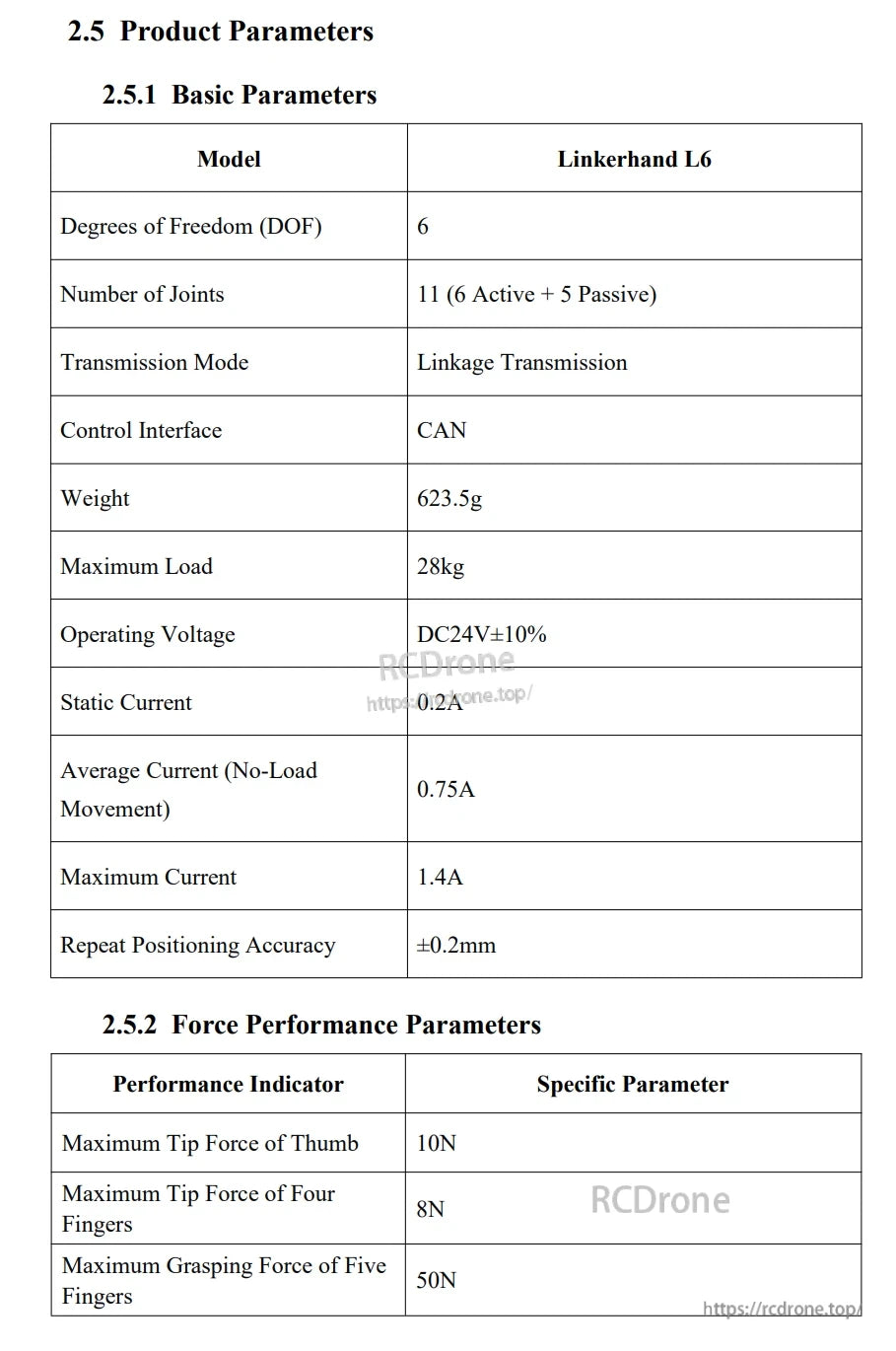
A mão robótica Linkerhand L6 tem 6 DOF, 11 articulações, controlo CAN, pesa 623,5g, suporta uma carga máxima de 28kg, funciona com DC24V±10%, oferece uma precisão de ±0,2mm e proporciona uma força de agarre de até 50N.
Related Collections







