







LINKERBOT Mão Robótica Linker Hand O6, 6 DoF, 11 articulações, CAN/RS485, 130N de força, precisão ±0,2mm, DC24V±10%
LINKERBOT Mão Robótica Linker Hand O6, 6 DoF, 11 articulações, CAN/RS485, 130N de força, precisão ±0,2mm, DC24V±10%
LINKERBOT
Não foi possível carregar a disponibilidade de recolha
Visão Geral
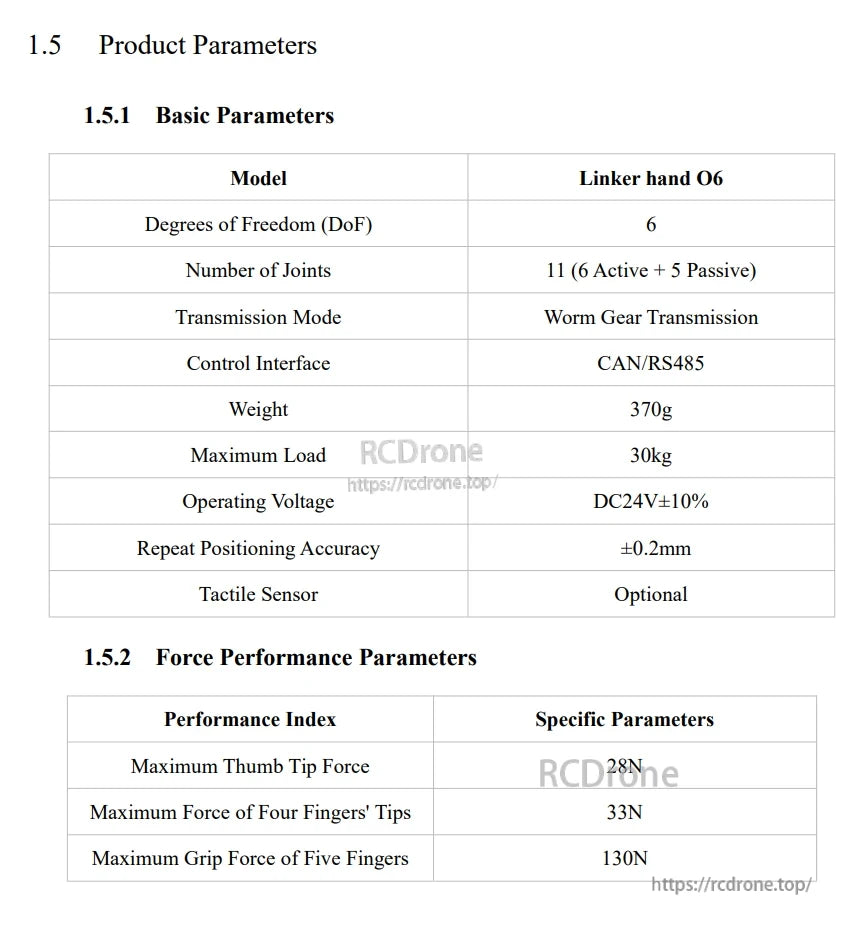
O LINKERBOT Linker Hand O6 é uma mão robótica projetada para integração compacta e manipulação precisa. Oferece 6 DoF com 11 articulações (6 ativas + 5 passivas), transmissão por engrenagem de verme para atuação estável, controlo CAN/RS485 e sensoriamento tátil opcional. A estrutura ágil proporciona até 130N de força de aperto com cinco dedos, com uma precisão de posicionamento repetido de ±0,2mm a uma tensão de operação de DC24V±10%. A construção leve de 370g e a pequena área ocupada suportam manuseio logístico, montagem industrial e cenários de agarre de formas irregulares.
Principais Características
Compacto &e Ágil
O design estrutural compacto reduz a carga do equipamento enquanto melhora a flexibilidade para um agarre preciso em espaços apertados.
Alta Durabilidade
Fabricado em liga de alumínio para resistência leve e durabilidade, suportando um desempenho estável a longo prazo.
Integração Dispositivo-Nuvem
A integração dispositivo-nuvem permite uma rápida implementação através de uma biblioteca de habilidades baseada na nuvem, com operação e personalização simplificadas.
Especificações
| Modelo | LINKERBOT Mão Linker O6 |
| Graus de Liberdade (DoF) | 6 |
| Número de Juntas | 11 (6 Ativas + 5 Passivas) |
| Modo de Transmissão | Transmissão por Engrenagem de Rosca |
| Interface de Controle | CAN/RS485 |
| Peso | 370g |
| Carga Máxima | 30kg |
| Tensão de Operação | DC24V±10% |
| Precisão de Reposição Repetida | ±0.2mm |
| Sensor Táctil | Opcional |
| Força Máxima da Ponta do Polegar | 28N |
| Força Máxima das Pontas de Quatro Dedos | 33N |
| Força Máxima de Aperto de Cinco Dedos | 130N |
| Dimensões (Aparência) | Altura 177mm; Largura 76.5mm; Espessura 40mm |
Amplitude de Movimento
| LF2, RF2, MF2, FF2 (Flexão) | 90° |
| LF1, RF1, MF1, FF1 (Flexão) | 80° |
| DEDOS1 (Flexão) | 55° |
| DEDOS2 (Flexão) | 30° |
| DEDOS3 (Lateral - oscilação) | 88° |
O que está incluído
- Cabo de Depuração USB para CAN ×1
- Cabo Conector XT30 (2+2) ×1
- Adaptador de Energia ×1
- Cabo de Energia ×1
- Linker Hand O6 x1
Para vendas ou suporte técnico, contacte [email protected] or visite https://rcdrone.top/.
Aplicações
- Manuseio logístico e transferência de materiais
- Montagem industrial e manipulação de ferramentas
- Apreensão estável de formas irregulares e itens de consumo
Manuais
Linker_Hand_O6_Product_Manual.pdf
Detalhes

O Linker Hand O6 oferece 6 articulações ativas e 5 passivas para um aperto preciso e forte. O design compacto e durável em alumínio é adequado para logística, montagem e apreensão irregular. Possui integração em nuvem para fácil treinamento de IA sem codificação.


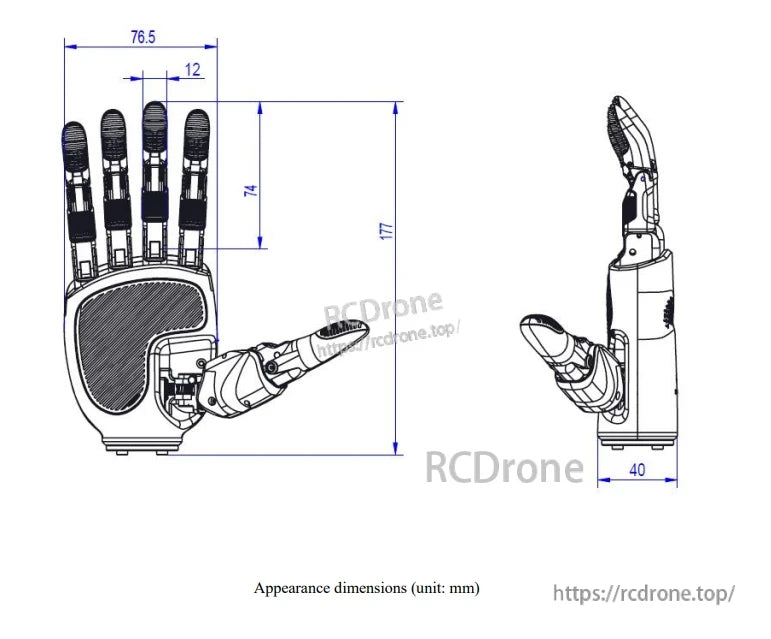
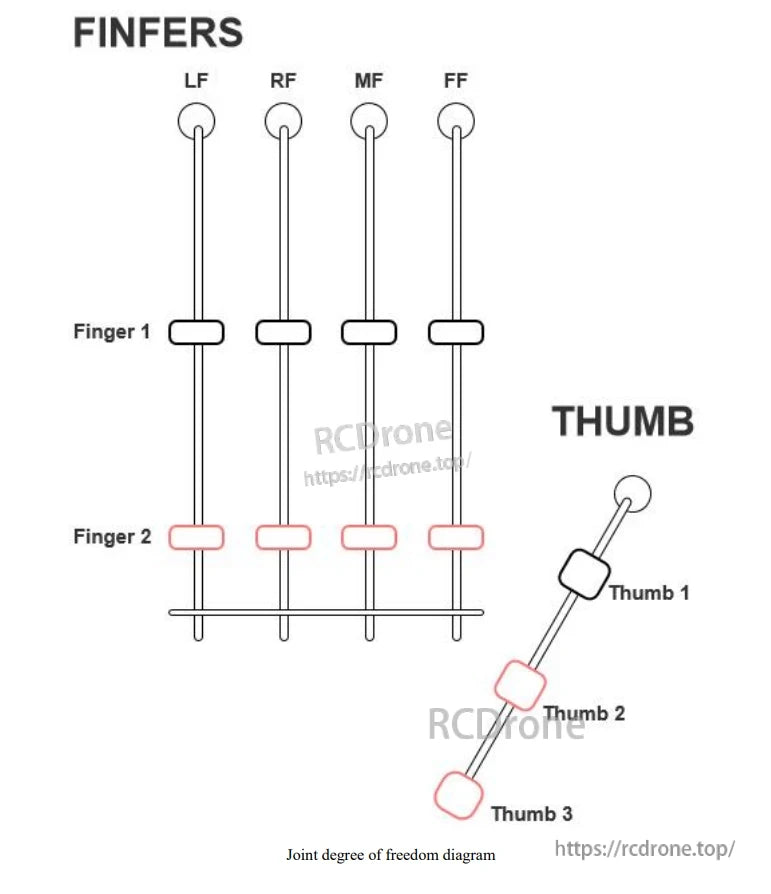
Diagrama de graus de liberdade das articulações dos dedos e do polegar
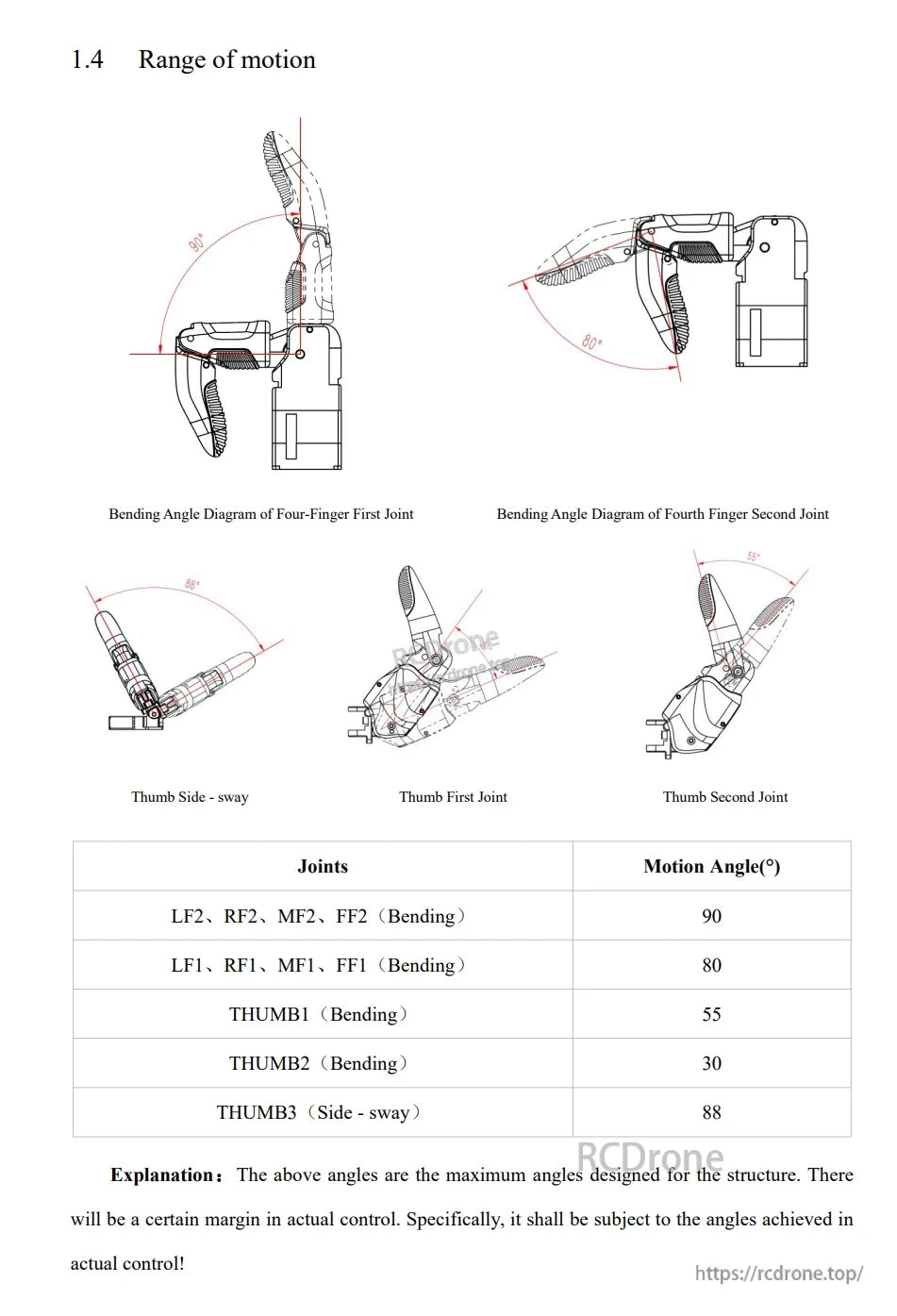
Os dedos dobram 80–90°, o polegar dobra 30–55°, e a oscilação lateral atinge 88°. Estes são os ângulos máximos projetados; o controle real pode variar ligeiramente.
A mão robótica Linker Hand O6 tem 6 DoF, 11 articulações, transmissão por engrenagem de verme, controlo CAN/RS485, pesa 370g, suporta carga máxima de 30kg, opera a DC24V±10%, com precisão de ±0.2mm, e oferece sensores táteis opcionais com desempenho de força especificado.

Lista de acessórios para instalação da mão destroça: cabo USB-para-CAN, conector XT30, adaptador de energia e cabo de energia—todas as quantidades um.
Related Collections







