



Motor LKMTECH MF5010-V2 16V 10T/35T, RS485/CAN, Encoder Magnético 18bit para Robots & AGV
Motor LKMTECH MF5010-V2 16V 10T/35T, RS485/CAN, Encoder Magnético 18bit para Robots & AGV
LKMTECH
Preço normal
$131.00 USD
Preço normal
Preço de saldo
$131.00 USD
Preço unitário
por
Impostos incluídos.
Envio calculado na finalização da compra.
Não foi possível carregar a disponibilidade de recolha
Visão Geral
Características Principais
- Design integrado (integração mecânica-elétrica)
- Design leve
- Alta precisão de controlo
- Alta saída de torque
- Imã permanente RbFeB de alto desempenho
- Encoder magnético de 18 bits
- Comunicação: RS485 ou CAN
- Suporta entrada PWM
- Aceleração trapezoidal
Cenários de Aplicação
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
- Câmera PTZ
- Laser lidar
- Robô de inspeção de estação de energia
- Inspeção industrial
Especificações
| Parâmetro | MF5010-V2 (10T) | MF5010-V2 (35T) |
|---|---|---|
| Nome do Item | MF5010-V2 | MF5010-V2 |
| Rotações | 10 | 35 |
| Tensão Nominal | 16V | 16V |
| Velocidade Máxima | 3050RPM | 870RPM |
| Torque Nominal | 0.26N.m | 0.24N.m |
| Velocidade Nominal | 2400RPM | 440RPM |
| Corrente Nominal | 5.06A | 1.35A |
| Poder Máximo | 128W | 12W |
| Torque Máximo | 0.4N.m | 0.53N.m |
| Constante de Velocidade | 150rpm/V | 27.5rpm/V |
| Constante de Torque | 0.05N.m/A | 0.18N.m/A |
| Tipo de Enrolamento | Y | Y |
| Resistência de Fase | 0.33Ω | 3.2Ω |
| Indutância de Fase | 0.13mH | 1.2mH |
| Pólos do Motor | 28 | 28 |
| Inércia do rotor | 202gcm² | 202gcm² |
| Temperatura do Motor | SIM | SIM |
| Carga Nominal do Rolamento | 153N | 153N |
| Peso do Motor | 137g | 137g |
| Recomendar Drive | DF40V2 | DF40V2 |
| Tensão de entrada do Drive | 7.4-32V | 7.4-32V |
| Comunicação | RS485 OU CAN | RS485 OU CAN |
| Frequência de Comunicação | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder Magnético de 18 bits | Encoder Magnético de 18 bits |
| Taxa de Baud do Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Taxa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modo de Controle | Loop de Torque(24KHz)/Loop de Velocidade(8KHz)/Loop de Posição(8KHz) | Loop de Torque(24KHz)/Loop de Velocidade(8KHz)/Loop de Posição(8KHz) |
| Curva de Aceleração | Aceleração Trapezoidal | Aceleração do trapézio |
Desenho de Instalação (Dimensões Chave)
- Marcas de diâmetro: Ø44.4, Ø44, Ø25
- Marcação do eixo/furo: Ø12.7H7 profundidade 16.5
- Marcação do diâmetro do corpo: Ø49 (-0.10), Ø49 (-0.05)
- Marcas de comprimento: 28.9 ±0.10, 17.5
- Furos de montagem: 4-M2.5 profundidade 8; 6-M2.5 profundidade 3; 4-M3 profundidade 3.5
- Marcação de comprimento adicional: 20
Manuais / Documentos
Para assistência em fiação, integração e pedidos (incluindo seleção de drive DF40V2 e configuração RS485/CAN), contacte [email protected] or visite https://rcdrone.top/.
Detalhes

Construído para juntas robóticas compactas, o MF5010 V2 combina um design de motor integrado com comunicação RS485/CAN e um encoder atualizado.
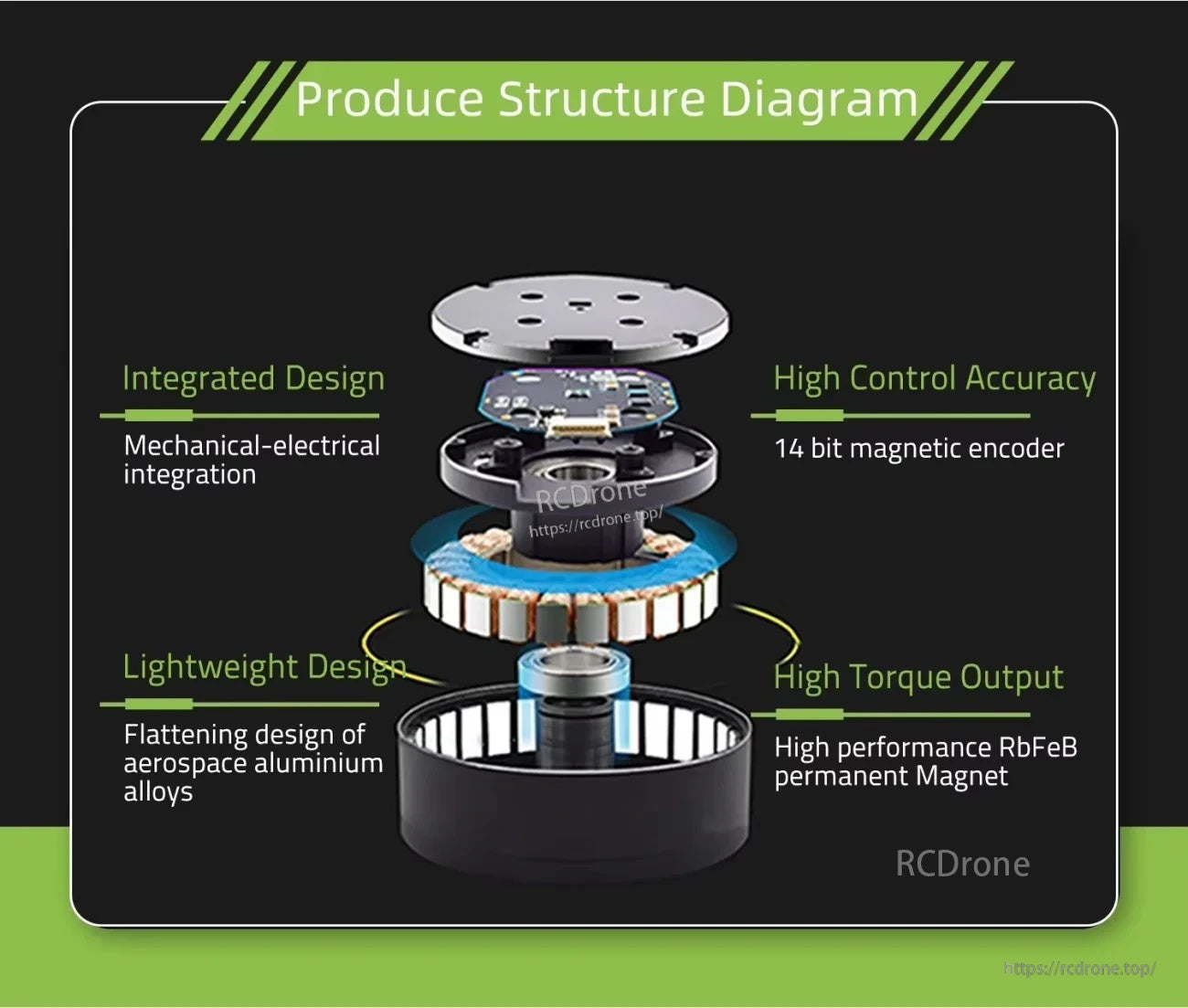
Uma estrutura mecânica-elétrica integrada ajuda a manter o peso baixo enquanto suporta controle preciso e saída de torque.
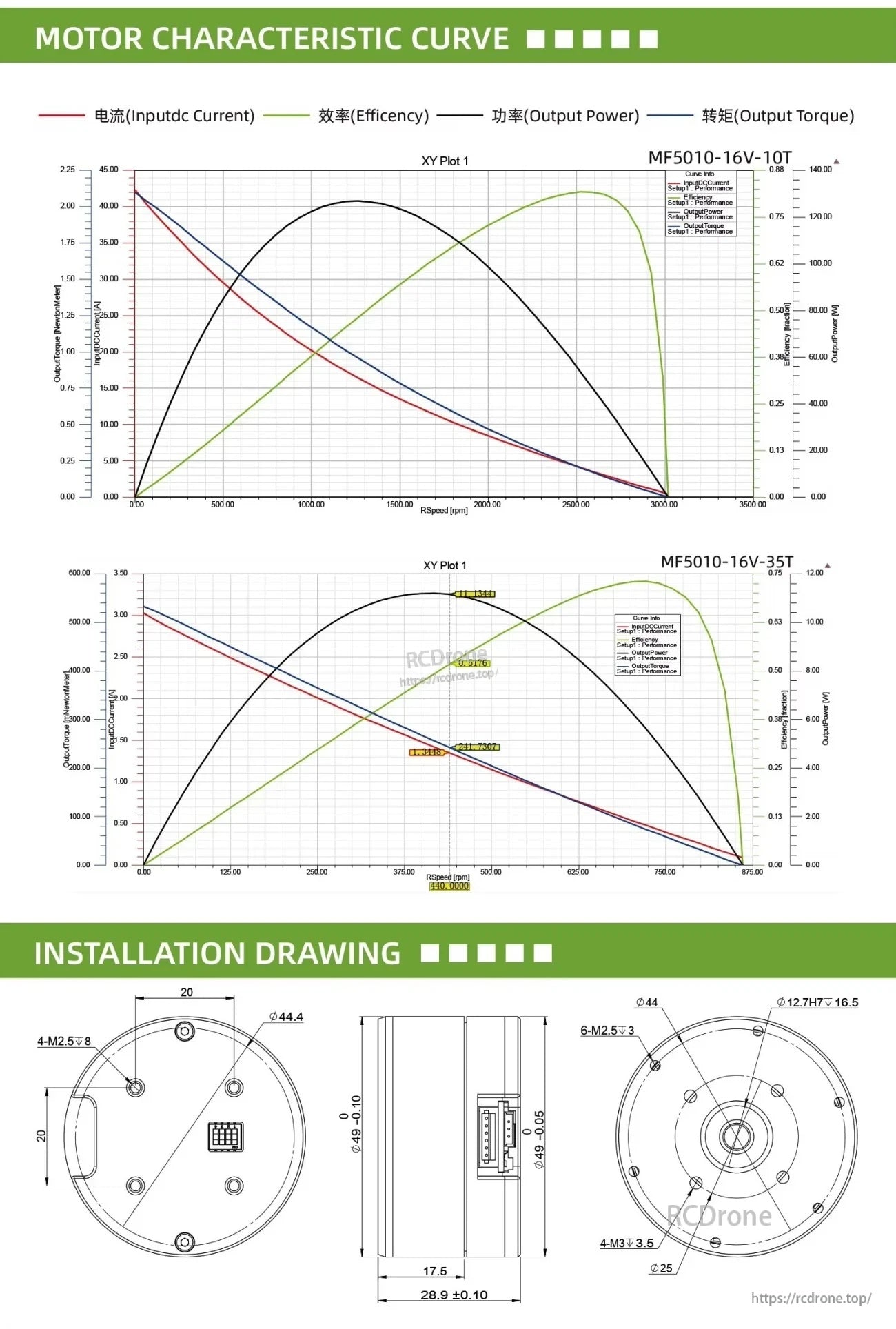
As curvas de referência e o desenho de instalação ajudam a corresponder a opção de enrolamento de 10T ou 35T às suas necessidades de velocidade/torque e ao layout de montagem.

Related Collections



