



Motor LKMTECH MF6010-V2 24V MF6010v2 15/25 Voltas Encoder 18bit RS485/CAN para Atuadores Robóticos
Motor LKMTECH MF6010-V2 24V MF6010v2 15/25 Voltas Encoder 18bit RS485/CAN para Atuadores Robóticos
LKMTECH
Não foi possível carregar a disponibilidade de recolha
Visão Geral
LKMTECH O Motor MF6010-V2 (MF6010v2) é um motor de design integrado para atuadores de robótica e automação, apresentando uma construção leve, alta precisão de controlo e alta saída de torque. A atualização do produto MF v2 inclui uma atualização da resolução do encoder de 14 bits para 18 bits, otimização do torque de arrasto, suporte a entrada PWM e comunicação CAN/RS485 com várias taxas de transmissão.
Características Principais
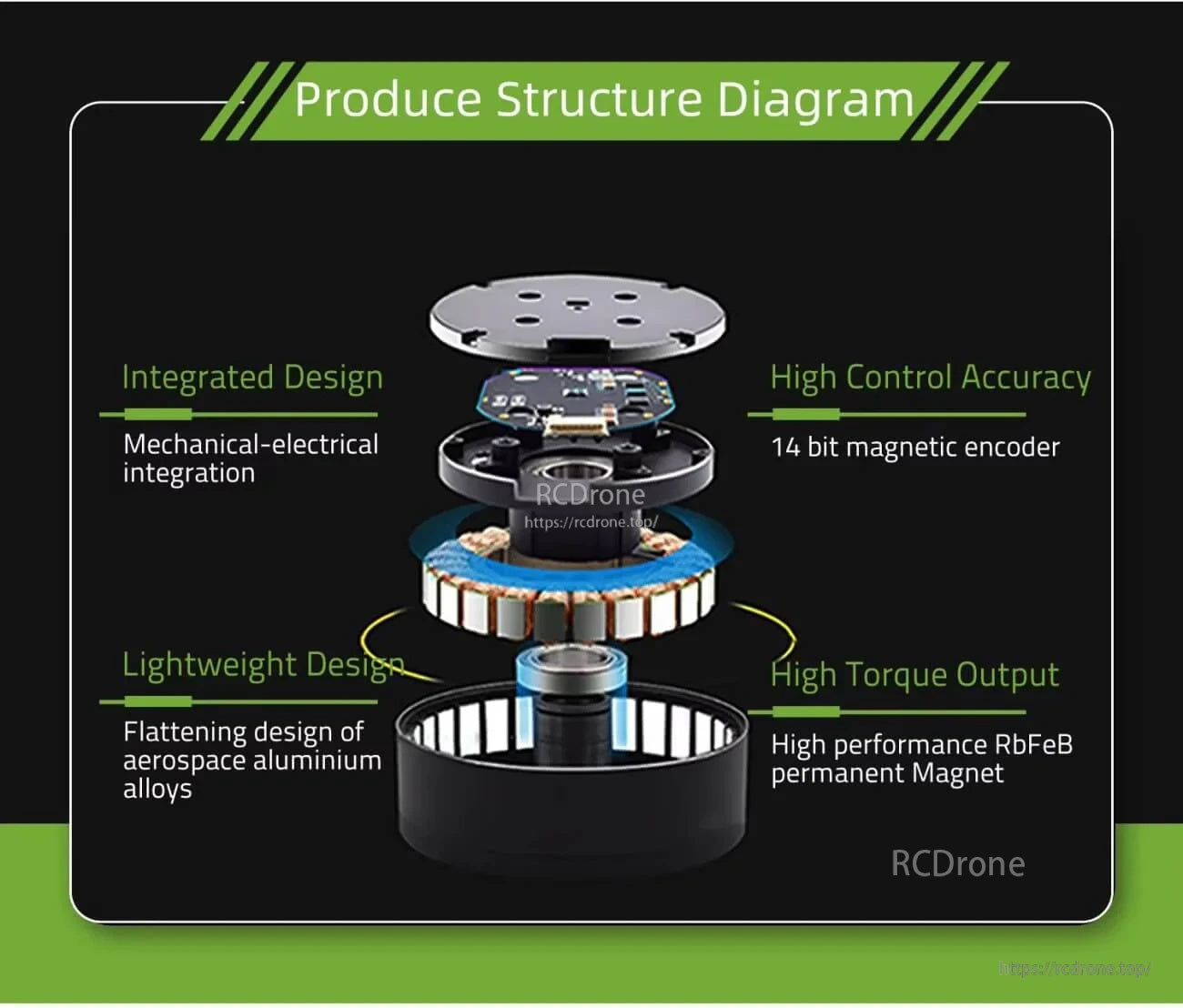
- Design integrado: integração mecânica-elétrica
- Design leve: design achatado de ligas de alumínio aeroespacial
- Saída de alto torque: íman permanente RbFeB de alto desempenho
- Alta precisão de controlo: encoder magnético de 14 bits (notas de atualização MF v2, resolução do encoder atualizada de 14 bits para 18 bits)
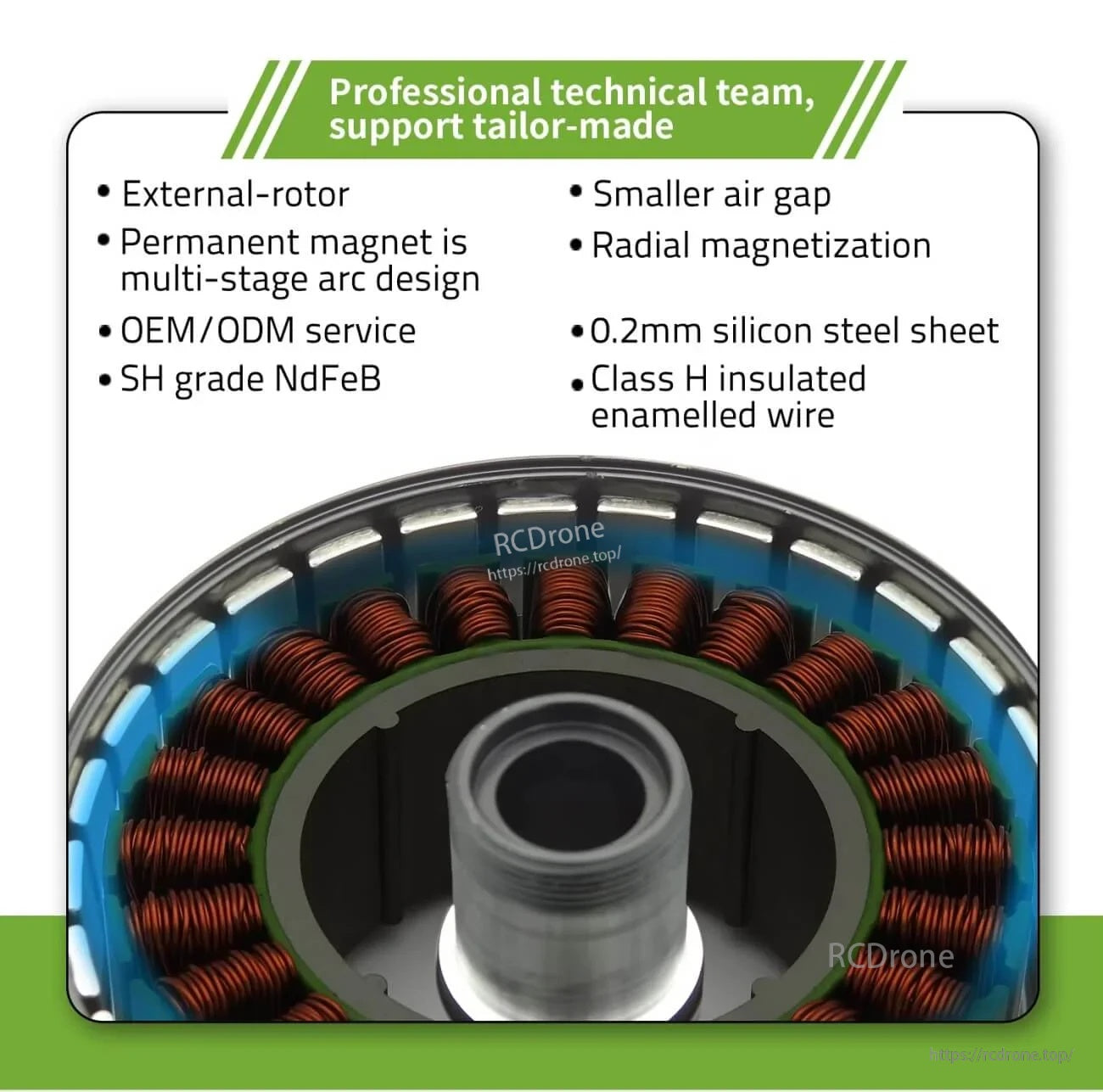
- Design de rotor externo
- Design de arco multi-estágio com íman permanente
- Íman NdFeB de grau SH
- Espaço de ar menor; magnetização radial
- 0.2mm chapa de aço silício
- Fio esmaltado isolado Classe H
- Suporta entrada PWM
- Suporte à comunicação CAN e RS485 com uma variedade de taxas de transmissão
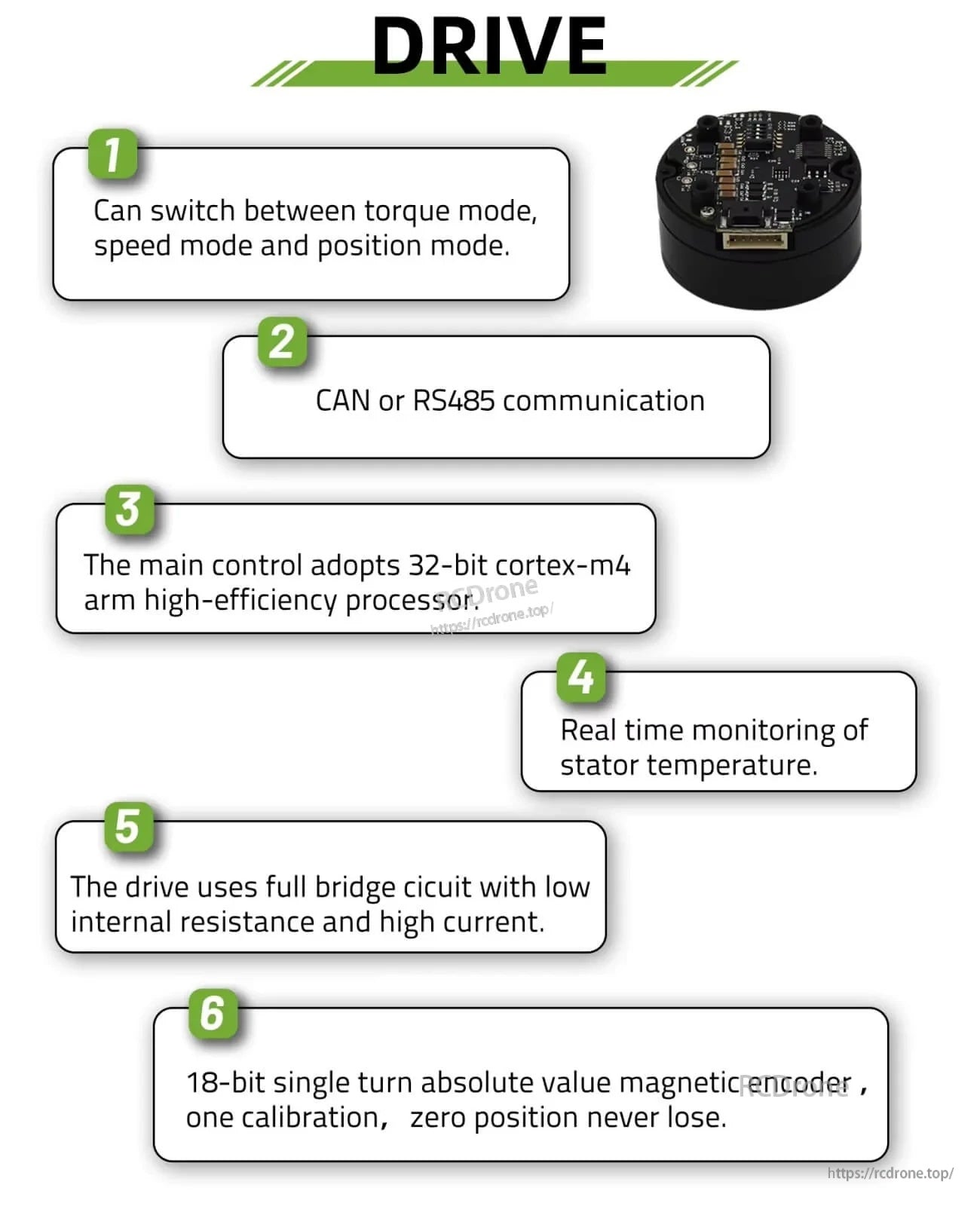
- Funções de acionamento (como apresentado): comutação de modo de torque/velocidade/posição; processador ARM Cortex-M4 de 32 bits de alta eficiência; monitorização em tempo real da temperatura do estator; circuito de ponte completa com baixa resistência interna e alta corrente; codificador magnético absoluto de 18 bits de uma volta (uma calibração, posição zero nunca se perde)
- Software de programa fornecido para ajustar parâmetros, testar e atualizar; suporta desenvolvimento de código aberto como PC, MCU, PLC, ICP e RPi
Para questões de integração (fiação, seleção de acionamento ou configuração de interface), contacte [email protected] or visite https://rcdrone.top/.
Aplicações
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
- Câmera PTZ
- Laser Lidar
- Robô de Inspeção de Estações de Energia
- Inspeção Industrial
Especificações
| Parâmetro | Valor (15 voltas) | Valor (25 voltas) |
|---|---|---|
| Nome do Item | MF6010v2 | MF6010v2 |
| Voltas | 15 | 25 |
| Tensão Nominal | 24V | 24V |
| Velocidade Máxima | 2200RPM | 1280RPM |
| Torque Nominal | 0.55N.m | 0.55N.m |
| Velocidade Classificada | 1700RPM | 900RPM |
| Corrente Classificada | 5.3A | 3.1A |
| Poder Máximo | 175W | 70W |
| Torque Máximo | 4N.m | 2.7N.m |
| Constante de Velocidade | 71rpm/V | 37.5rpm/V |
| Constante de Torque | 0.18N.m/A | 0.10N.m/A |
| Tipo de Enrolamento | Y | Y |
| Resistência da Linha | 0.65Ω | 1.59Ω |
| Indutância de Fase | 0.34mH | 0.99mH |
| Pólos do Motor | 28 | 28 |
| Inércia do rotor | 394gcm² | 394gcm² |
| Temperatura do Motor | SIM | SIM |
| Carga Nominal do Rolamento | 280N | 280N |
| Peso do Motor | 193g | 193g |
| Recomendar Drive | DF40v2 | DF40v2 |
| Tensão de entrada do Drive | 7.4-32V | 7.4-32V |
| Comunicação | RS485 OU CAN | RS485 OU CAN |
| Frequência de Comunicação | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder Magnético de 18 bits | Encoder Magnético de 18 bits |
| Taxa de Baud do Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Taxa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modo de Controle | Laço de Torque(24KHz)/Laço de Velocidade(8KHz)/Laço de Posição(8KHz) | Laço de Torque(24KHz)/Laço de Velocidade(8KHz)/Laço de Posição(8KHz) |
| Curva de Aceleração | Aceleração Trapezoidal | Aceleração Trapezoidal |
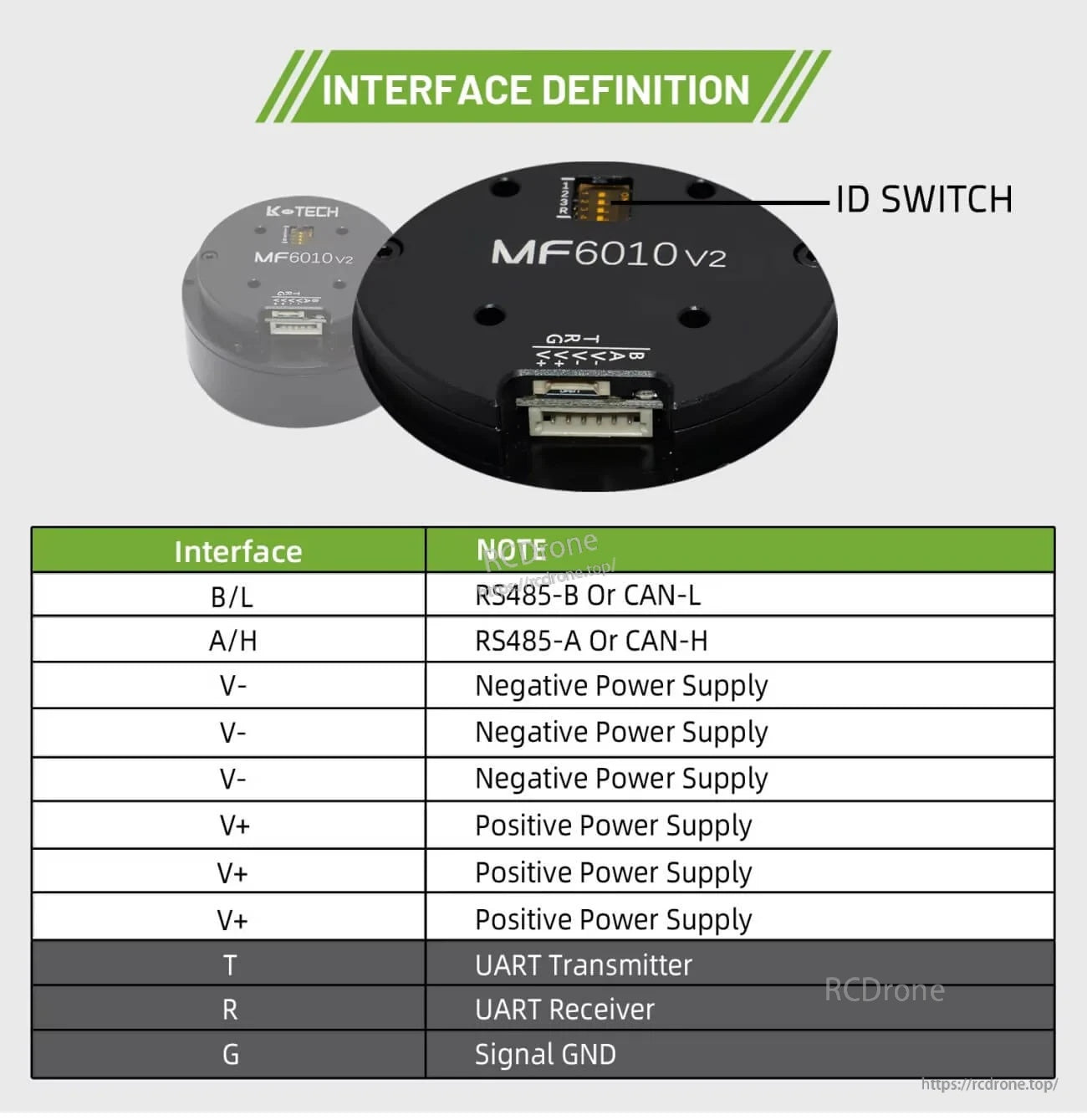
Definição da Interface
- ID SWITCH
| Interface | Nota |
|---|---|
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Fonte de Alimentação Negativa |
| V- | Fonte de Alimentação Negativa |
| V- | Fonte de Alimentação Negativa |
| V+ | Fonte de Alimentação Positiva |
| V+ | Fonte de Alimentação Positiva |
| V+ | Fonte de Alimentação Positiva |
| T | Transmissor UART |
| R | Receptor UART |
| G | GND de Sinal |
Manuais
Detalhes

MF6010v2 é um motor integrado compacto para atuadores robóticos, atualizado com um encoder magnético de 18 bits, além de entrada PWM e controle CAN/RS485.
Um layout mecânico-elétrico integrado mantém o atuador esguio, enquanto mantém um feedback preciso e uma forte saída de torque.
Rotulagem clara dos conectores e um interruptor de ID a bordo ajudam em configurações de barramento multi-motor usando RS485 ou CAN.
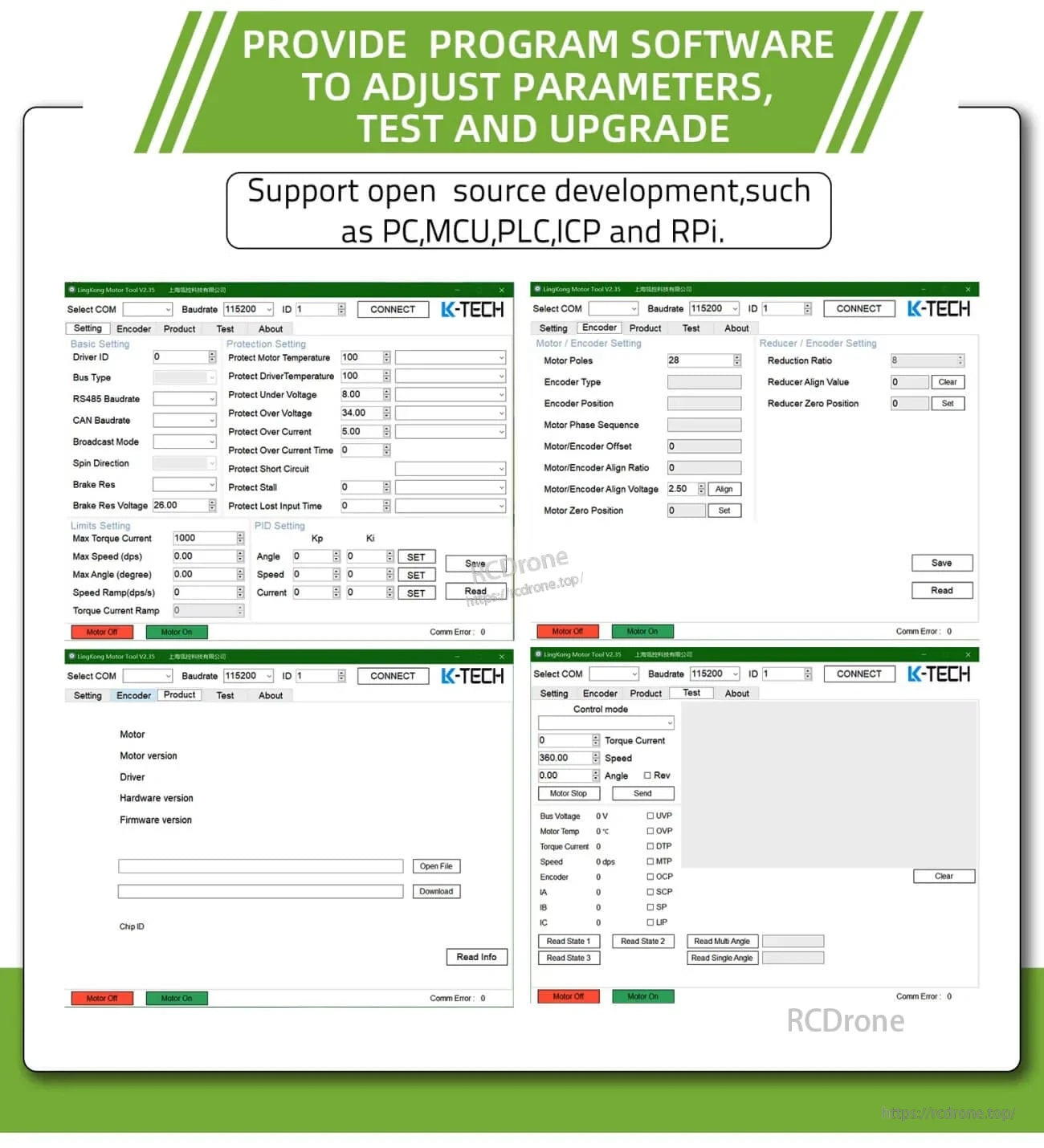
O software de configuração é fornecido para ajuste de parâmetros, testes e atualizações durante a integração e comissionamento.

Related Collections



