



Motor LKMTECH MF7010-V2 24V (23T/45T) RS485/CAN Encoder 18-bit, Drive DF70V2 para Robots
Motor LKMTECH MF7010-V2 24V (23T/45T) RS485/CAN Encoder 18-bit, Drive DF70V2 para Robots
LKMTECH
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O LKMTECH MF7010-V2 Motor é um motor para articulações de robótica e automação, oferecendo comunicação RS485 ou CAN (com o drive DF70V2 recomendado) e um encoder magnético integrado. Está especificado em duas opções de enrolamento (23 voltas / 45 voltas), ambas com classificação de 24V, com suporte de temperatura do motor e um encoder magnético de 18 bits.
Principais Características
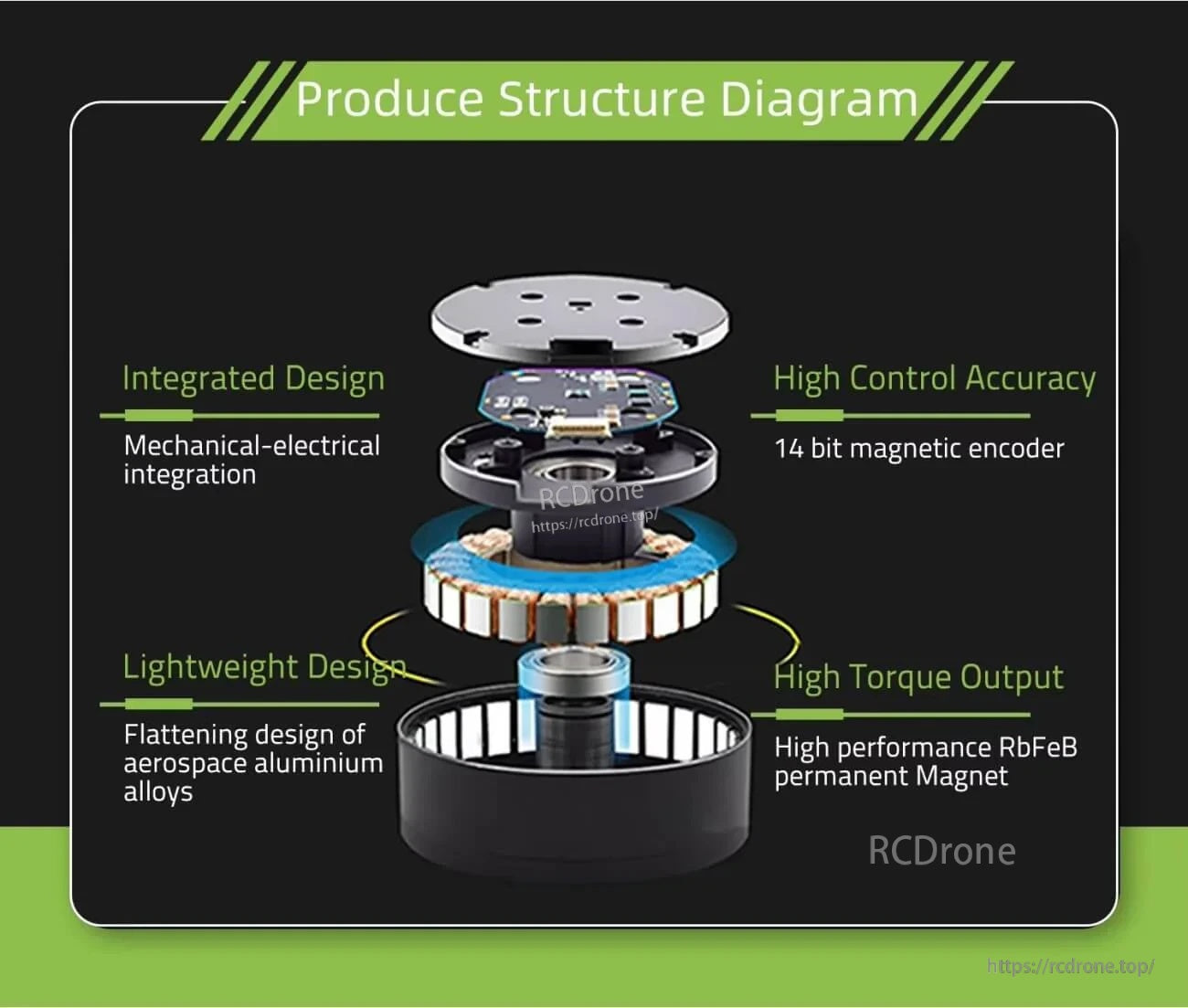
- Design integrado com integração mecânico-elétrica
- Alta precisão de controlo (encoder magnético de 14 bits é referenciado no material de características)
- Saída de torque elevada com íman permanente RbFeB de alto desempenho (redação do material de características)
- Design leve com design achatado de ligas de alumínio aeroespacial (redação do material de características)
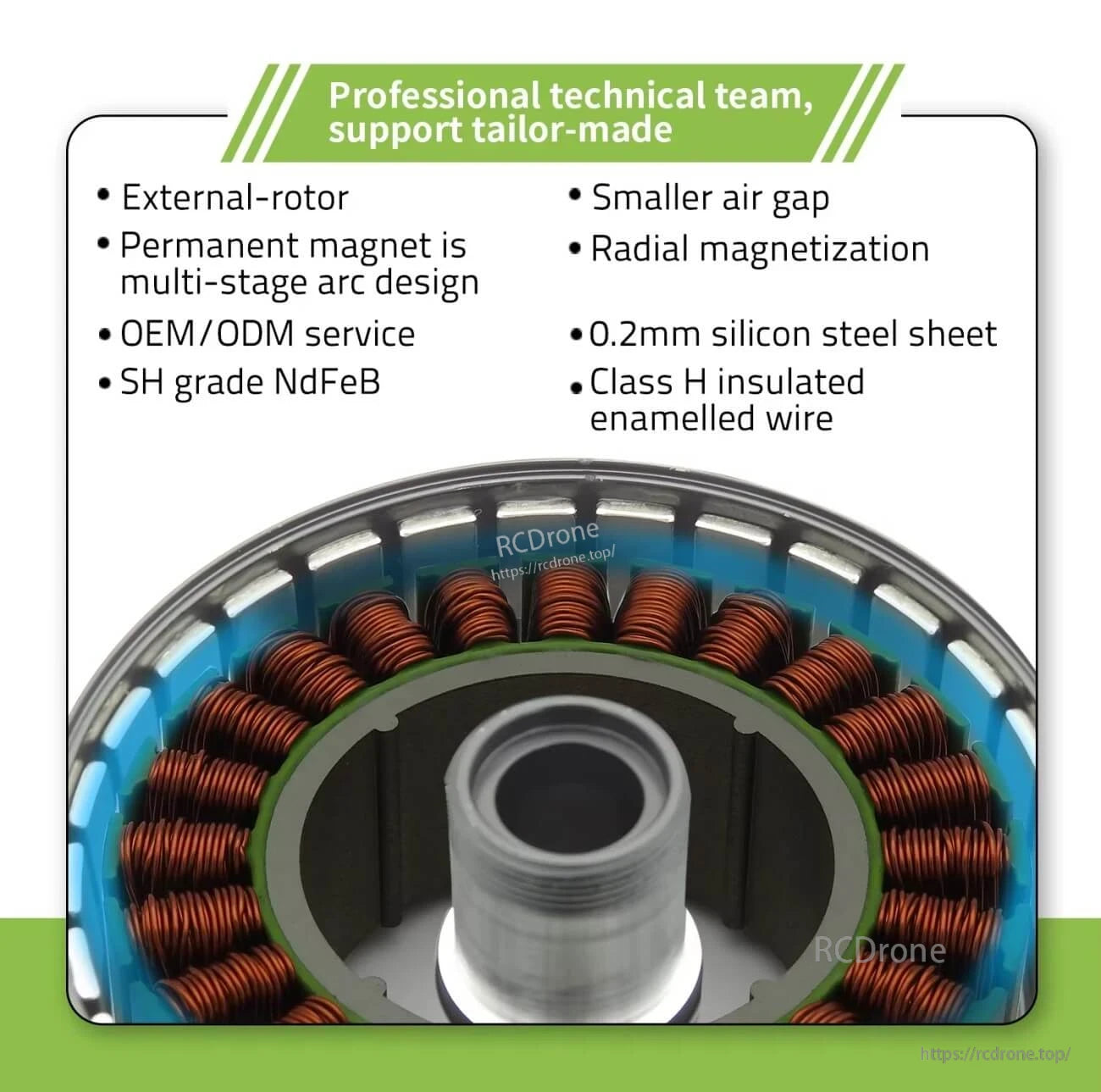
- Design de rotor externo
- Design de arco multi-estágio com íman permanente
- Menor espaço de ar; magnetização radial
- 0.2 mm chapa de aço silício
- Fio esmaltado isolado Classe H
- NdFeB grau SH (redação do material em destaque)
- Software de programa fornecido para ajustar parâmetros, testar e atualizar; suporta desenvolvimento de código aberto como PC, MCU, PLC, ICP e RPi
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
- Câmera PTZ
- Sistemas de Laser LiDAR
- Robôs de inspeção de estações de energia
- Equipamento de inspeção industrial
Especificações
| Parâmetro | MF7010-V2 (23 voltas) | MF7010-V2 (45 voltas) |
|---|---|---|
| Nome do Item | MF7010-V2 | MF7010-V2 |
| Voltas | 23 | 45 |
| Tensão Nominal | 24V | 24V |
| Velocidade Máxima | 1230 RPM | 620 RPM |
| Torque Nominal | 0.61 N.m | 0.63 N.m |
| Velocidade Nominal | 940 RPM | 400 RPM |
| Corrente Nominal | 3.3 A | 1.75 A |
| Poder Máximo | 104 W | 31 W |
| Torque Máximo | 2 N.m | 2.1 N.m |
| Constante de Velocidade | 39 rpm/V | 16.7 rpm/V |
| Constante de Torque | 0.18 N.m/A | 0.36 N.m/A |
| Tipo de Enrolamento | Y | Y |
| Resistência de Fase | 0.71 ohm | 2.73 ohm |
| Indutância de Fase | 0.86 mH | 3.3 mH |
| Pólos do Motor | 28 | 28 |
| Inércia do rotor | 748 gcm^2 | 748 gcm^2 |
| Temperatura do Motor | SIM | SIM |
| Carga Nominal do Rolamento | 330 N | 330 N |
| Peso do Motor | 278 g | 278 g |
| Recomendar Drive | DF70V2 | DF70V2 |
| Tensão de entrada do Drive | 7.4-32V | 7.4-32V |
| Comunicação | RS485 ou CAN | RS485 ou CAN |
| Frequência de Comunicação | RS485: 500 Hz (115200 bps) / CAN: 2 kHz (1 Mbps) | RS485: 500 Hz (115200 bps) / CAN: 2 kHz (1 Mbps) |
| Encoder | Encoder magnético de 18 bits | Encoder magnético de 18 bits |
| Taxa de Baud do Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1 Mbps, 2 Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1 Mbps, 2 Mbps |
| Taxa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modo de Controle | Loop de torque (24 kHz) / Loop de velocidade (8 kHz) / Loop de posição (8 kHz) | Loop de torque (24 kHz) / Loop de velocidade (8 kHz) / Loop de posição (8 kHz) |
| Curva de aceleração | Aceleração trapezoidal | Aceleração trapezoidal |
Manuais
Para questões de compatibilidade pré-venda (seleção de drive, configuração RS485/CAN, configuração de baudrate) ou ajuda com documentação, contacte [email protected] or visite https://rcdrone.top/ .
Detalhes
A construção mecânica-elétrica integrada mantém o atuador compacto enquanto suporta um controlo de malha fechada preciso para articulações de robô.
O layout de rotor externo e o design de folga de ar apertada ajudam a fornecer torque responsivo em um formato de motor de articulação leve.
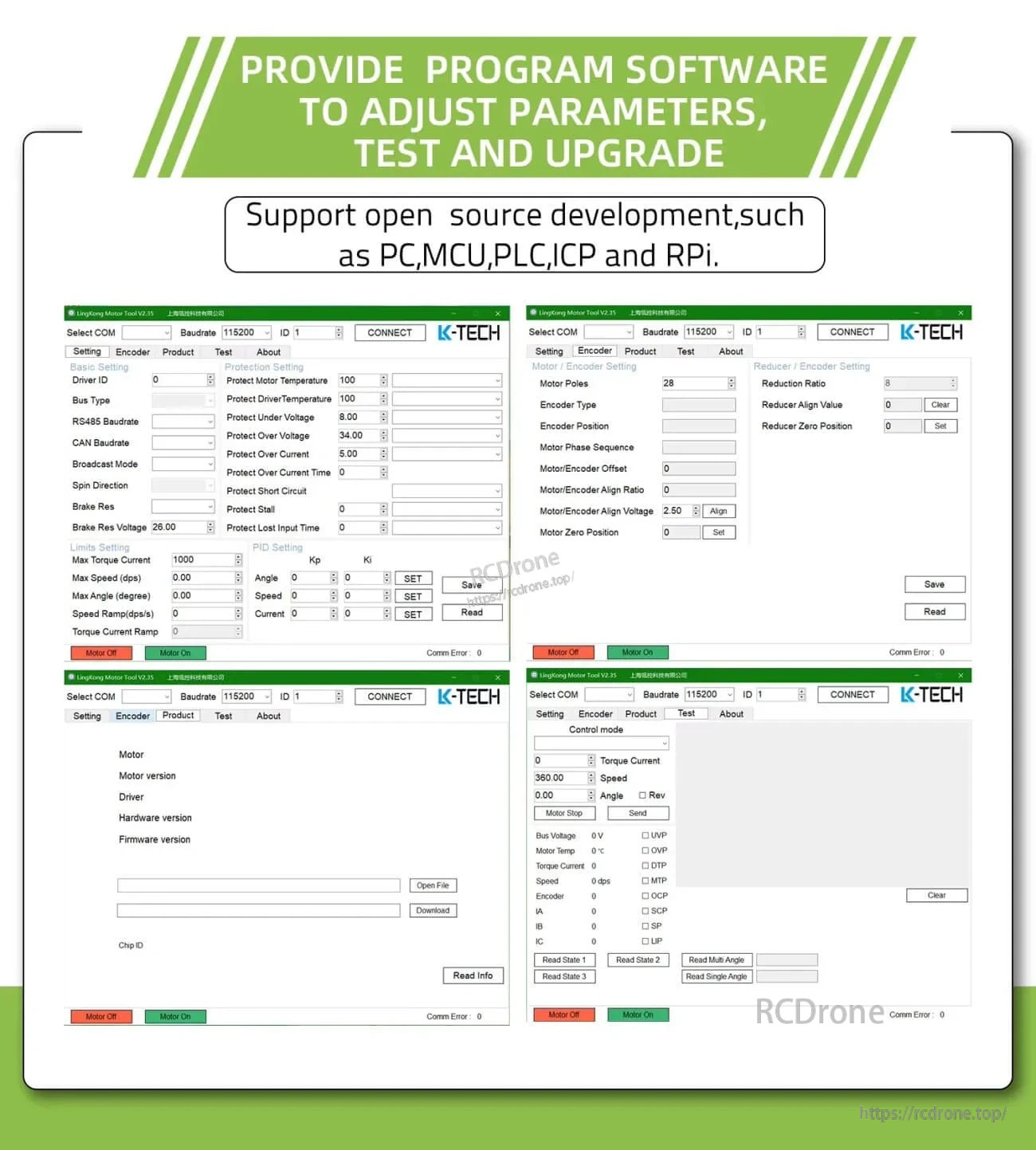
O software para PC está disponível para configuração de parâmetros, diagnósticos e atualizações de firmware quando utilizado com o drive DF70V2 recomendado.

Related Collections



