




LKMTECH MG4010E-i36-V3 Motor de Engrenagem Planetário 24V 1:36 RS485/CAN Encoder Magnético para Robótica
LKMTECH MG4010E-i36-V3 Motor de Engrenagem Planetário 24V 1:36 RS485/CAN Encoder Magnético para Robótica
LKMTECH
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O LKMTECH MG4010E-i36-V3 Motor é um motor de engrenagem planetária projetado para robótica e atuadores de controlo de movimento. Combina um motor sem escovas, redutor planetário e encoder magnético, com opções de comunicação listadas como RS485 ou CAN.
Principais Características
- Motor de engrenagem planetária (MG4010E-i36, V3).
- Relação de engrenagem: 1:36 (também mostrado como “Relação de engrenagem 1:36”).
- Folga da engrenagem: 7 arcmin (rótulo da imagem) / 12 arcmin (tabela de especificações).
- Encoder: encoder magnético absoluto de 18 bits de uma volta (texto da imagem); também listado como encoder magnético de 18 bits (motor) + 14 bits (reductor) (tabela de especificações).
- Comunicação: RS485 ou CAN.
- Driver de FOC/Drive referenciado (texto da imagem: “Driver FOC de alto desempenho”).
- Freio embutido (texto da imagem/rótulo da interface).
- Parâmetros do host/testes/atualizações de firmware suportados (texto da imagem).
Especificações
| Nome do Item | MG4010E-i36-V3 |
| Tensão Nominal | 24V |
| Velocidade Máxima | 90RPM |
| Velocidade Nominal | 77RPM |
| Corrente Nominal | 2.4A |
| Poder Máximo | 132W |
| Torque Nominal | 6 N.m (tabela de especificações) / 9 N.m (rótulo da imagem) |
| Torque Máximo | 13 N.m (tabela de especificações) / 18 N.m (rótulo da imagem) |
| Constante de Velocidade | 3 rpm/V |
| Constante de Torque | 2.58 N.m/A |
| Voltas | 14 |
| Tipo de Enrolamento | Y |
| Resistência de Fase | 0.68 Ω |
| Indutância de Fase | 0.25 mH |
| Pólos do Motor | 28 |
| Inércia do rotor | 158 gcm² |
| Temperatura do Motor | SIM |
| Tipo de Redutor | PG5336 |
| Relação de Redução | 1:36 |
| Folga | ≤12 arcmin (tabela de especificações) / 6 arcmin (rótulo da imagem) |
| Carga Nominal do Rolamento | 1120 N |
| Peso do Motor | 378 g |
| Recomendação de Acionamento | DG40E |
| Tensão de Entrada do Acionamento | 12-24V (tabela de especificações) / 12-60V (rótulo da imagem) |
| Comunicação | RS485 OU CAN |
| Frequência de Comunicação | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| Encoder | 18bit (motor) + 14bit (redutor) Encoder Magnético |
| Taxa de Baud do Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| Taxa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Modo de Controle | Loop de Torque (24 KHz) / Loop de Velocidade (8 KHz) / Loop de Posição (4 KHz) |
| Curva de Aceleração | Aceleração trapezoidal |
| Tamanho do Motor | Φ 53*54.5 (rótulo da imagem) |
Definição da Interface
- Interruptor de ID (rótulo da imagem: “ID SWITCH”).
| Port | Instruções |
|---|---|
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| V- | Fonte de Alimentação Negativa |
| V+ | Fonte de Alimentação Positiva |
| T | Transmissor UART |
| R | Receptor UART |
| G | GND de Sinal |
Cenários de Aplicação
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV / carro AGV
- Robôs ARU
- Cão Mecha
- Robô de Serviço
- Lidar Portátil
- Robô de Treinamento de Reabilitação
- Robô de Inspeção
Notas de Software de Controle&
- Suporta plataformas de desenvolvimento de código aberto, como PC, MCU, PLC, ICP e RPi.
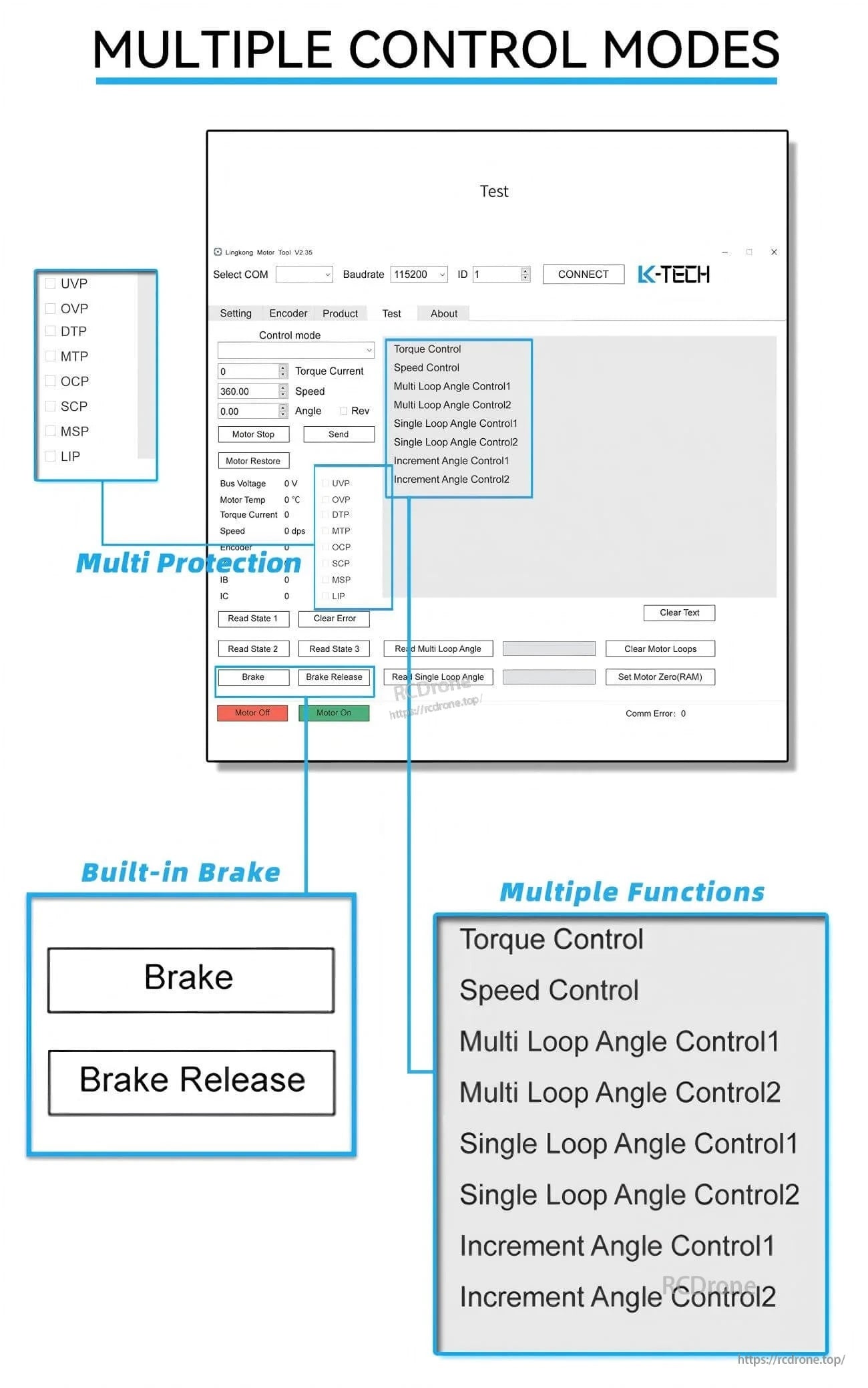
- Modos listados (texto da imagem): Modo de Torque, Modo de Velocidade, Modo de Controlo de Múltiplas Voltas, Modo de Posição + Direção de Uma Única Volta, Modo de Posição Incremental; versões com limite de velocidade também são mostradas.
- Múltiplos modos de controlo mostrados na UI: Controlo de Torque, Controlo de Velocidade, Controlo de Ângulo de Múltiplos Laços1, Controlo de Ângulo de Múltiplos Laços2, Controlo de Ângulo de Um Único Laço1, Controlo de Ângulo de Um Único Laço2, Controlo de Ângulo Incremental1, Controlo de Ângulo Incremental2.
- Rótulos de múltipla proteção mostrados: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Controles de travão integrados mostrados: Travão, Liberação do Travão.
Para verificações de compatibilidade pré-venda (integração RS485/CAN, seleção de taxa de transmissão) ou ajuda de acesso a ficheiros, contacte [email protected] or visite https://rcdrone.top/.
Manuais / Documentos
Detalhes

O MG4010E-i36-V3 combina um motor sem escovas, redutor planetário e encoder magnético para atuadores robóticos compactos.
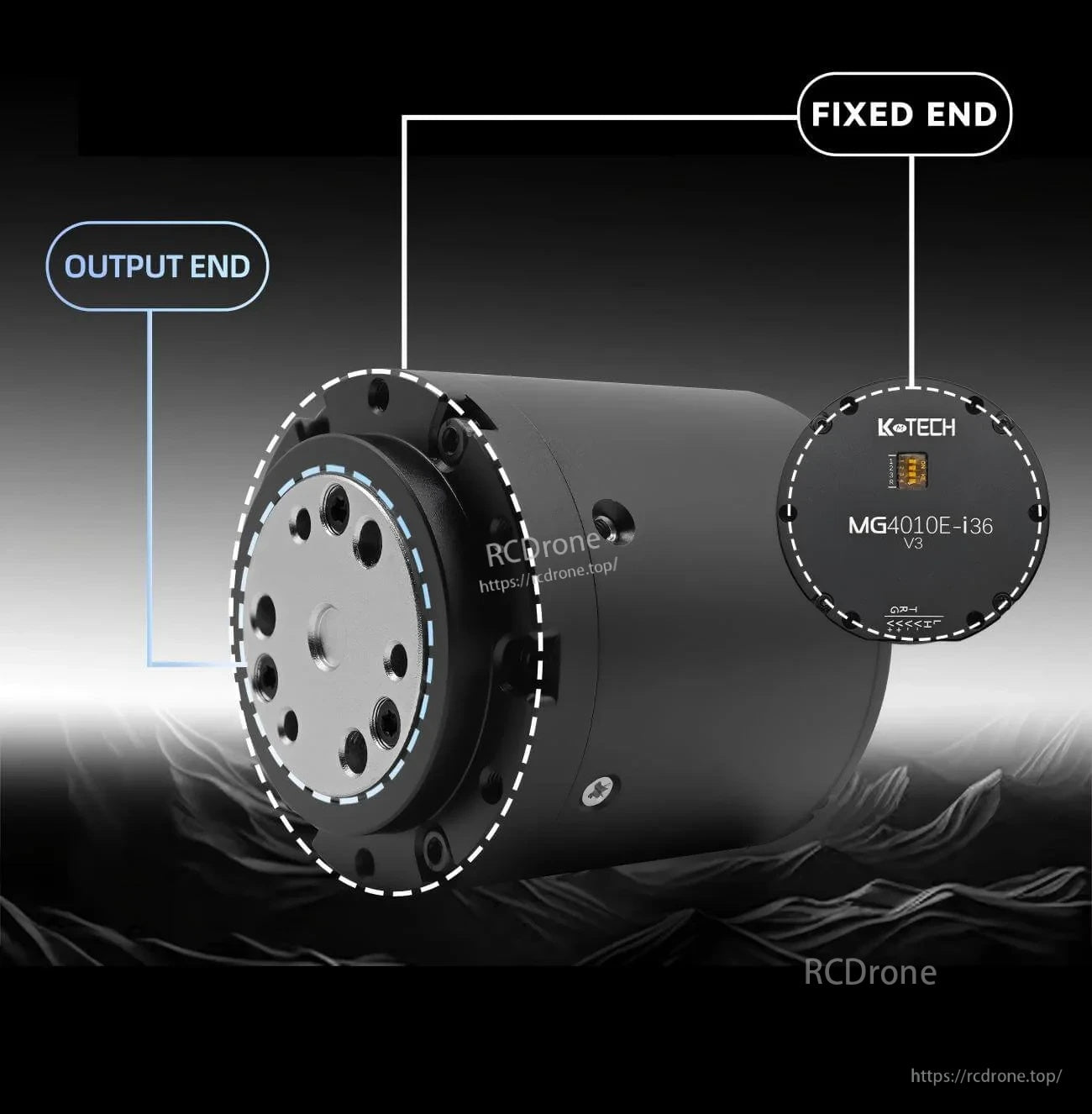
Um extremo de saída em estilo flange e um layout de extremidade fixa facilitam a integração em braços, pernas e outros módulos de articulação.

A comunicação RS485 ou CAN emparelha-se com um driver FOC e feedback de encoder magnético absoluto para controle estável de torque, velocidade e posição.
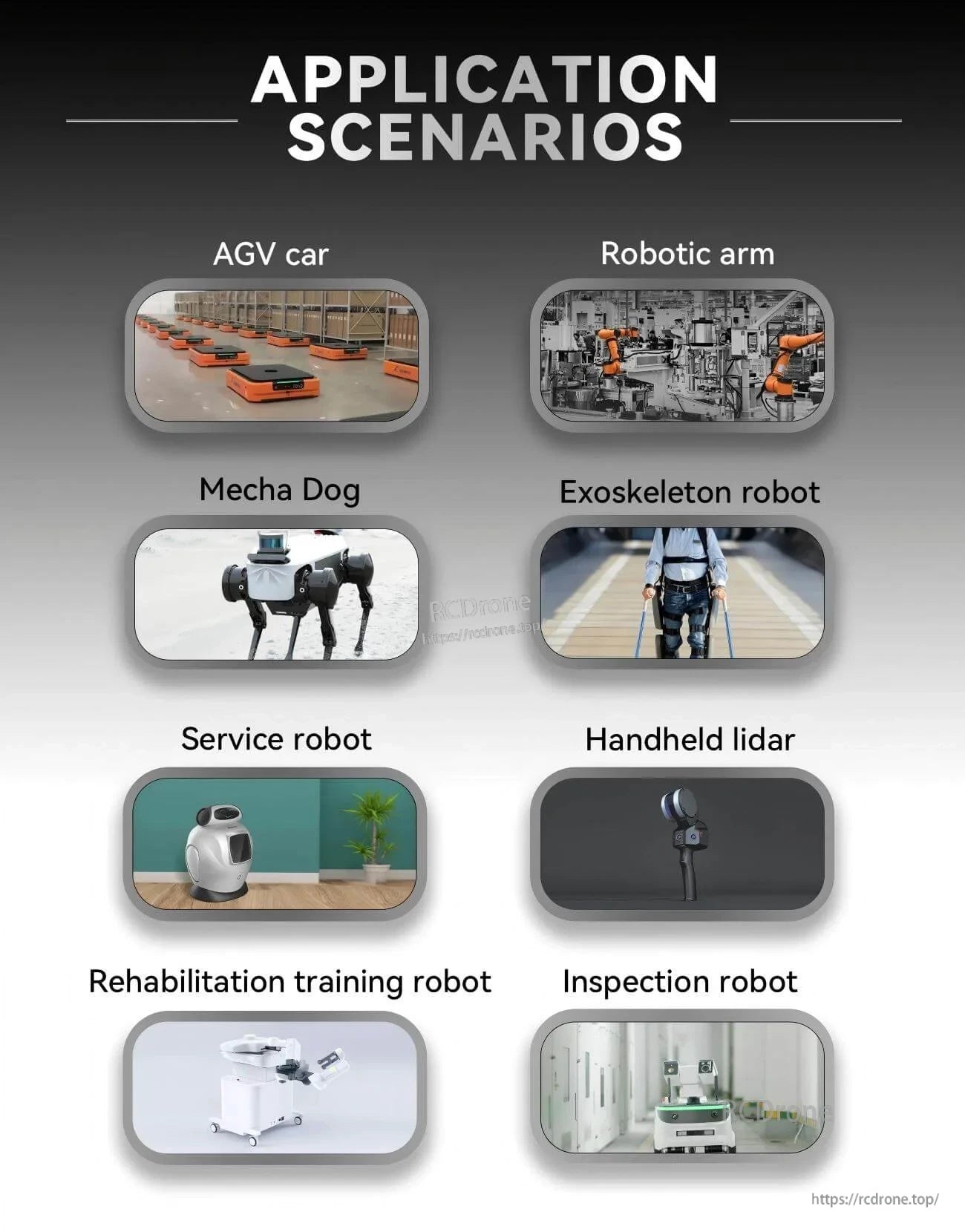
Os casos de uso comuns incluem AGVs, braços robóticos, plataformas quadrúpedes, exoesqueletos e robôs de inspeção ou serviço.
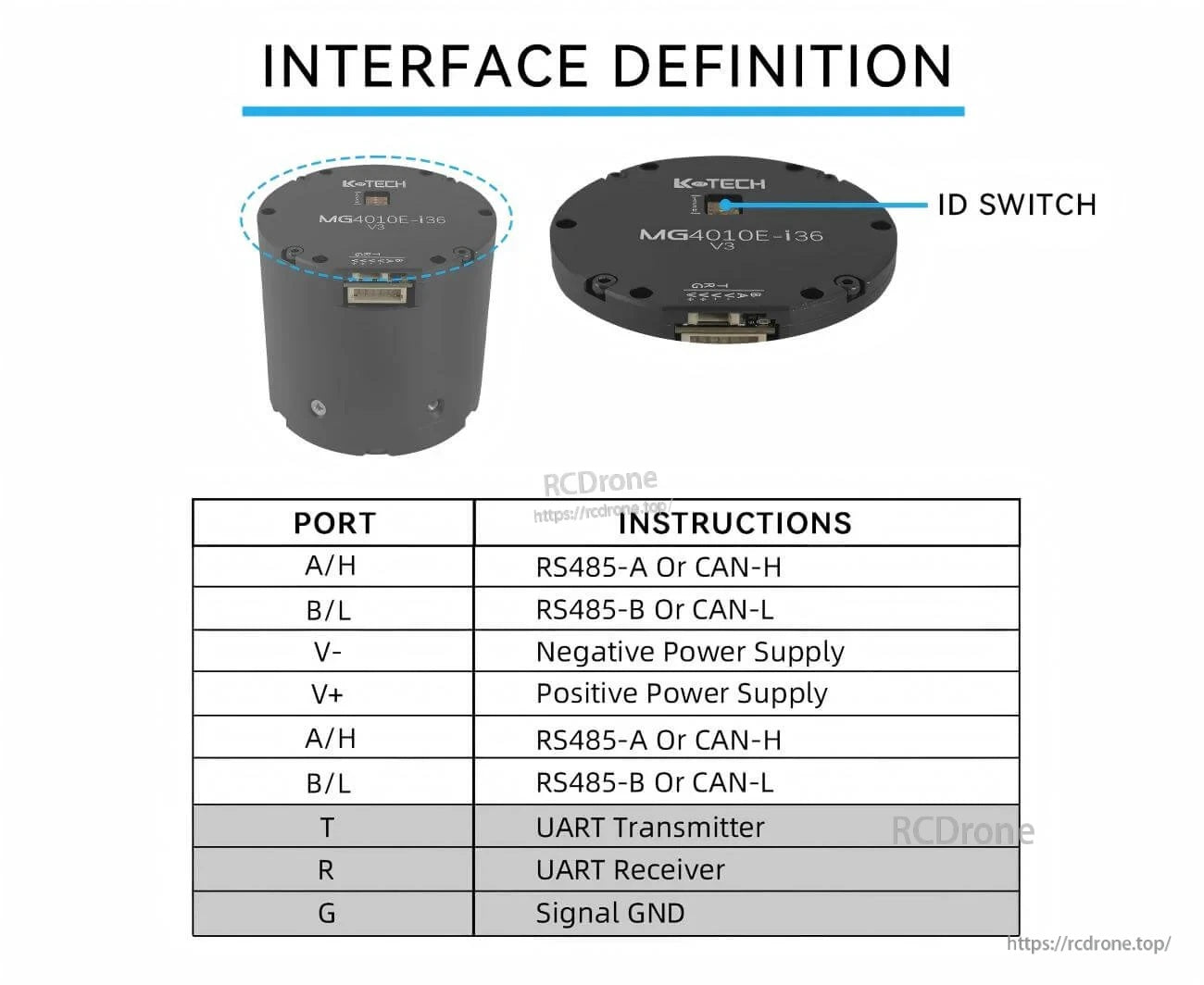
A fiação é simplificada com pinos de bus RS485/CAN rotulados, conexões de energia, UART Tx/Rx, terra de sinal e um interruptor de ID a bordo.
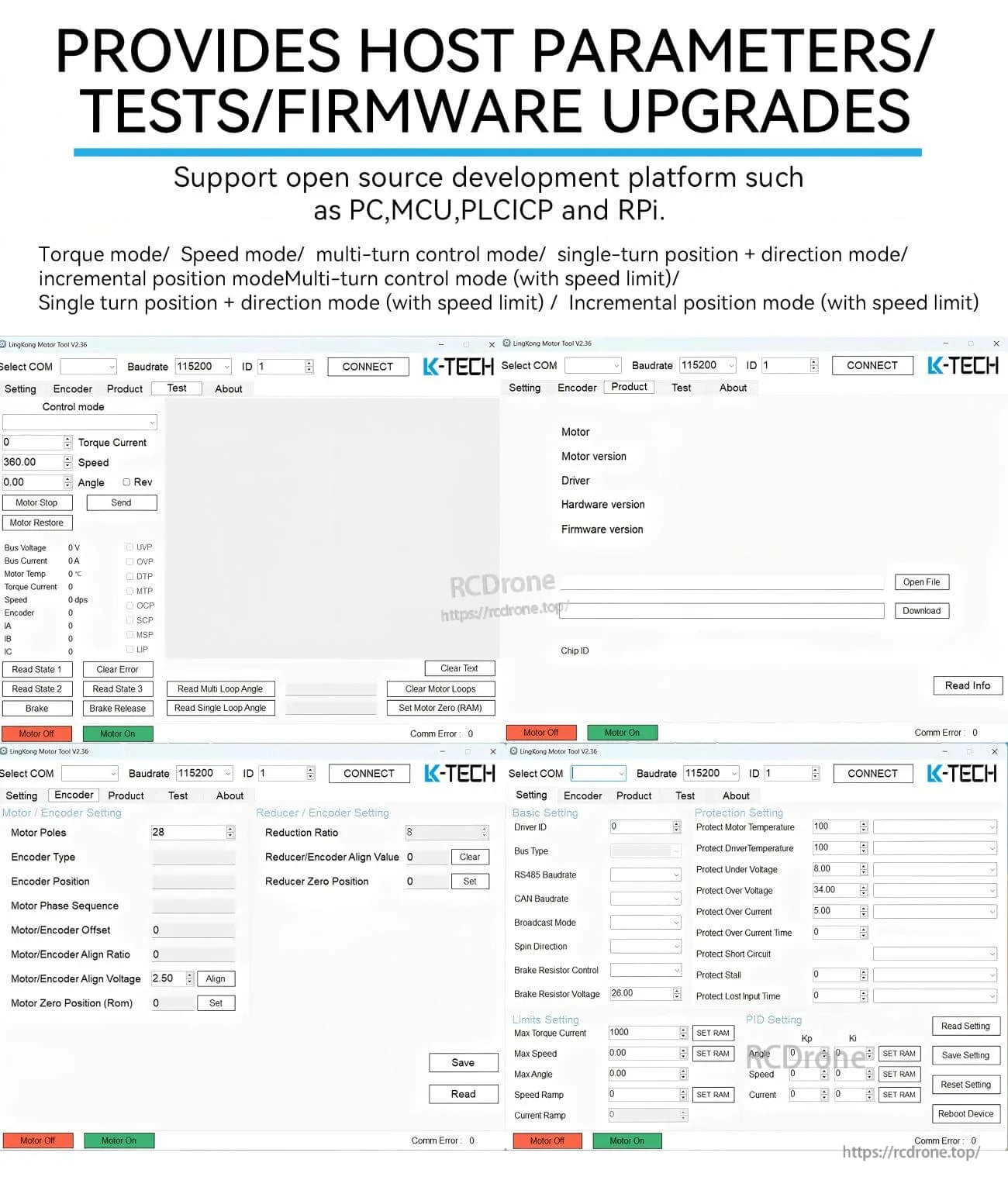
O controlo de travão incorporado e os múltiplos modos de operação ajudam a ajustar o comportamento para diferentes tarefas de controlo de movimento e requisitos de segurança.
Related Collections




