




Motor LKMTECH MG5010E-i10-V3 24V 160W Redutor Planetário 1:10, RS485/CAN, Encoder 18 bits
Motor LKMTECH MG5010E-i10-V3 24V 160W Redutor Planetário 1:10, RS485/CAN, Encoder 18 bits
LKMTECH
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O LKMTECH MG5010E-i10-V3 Motor é um motor sem escovas com um redutor de engrenagem planetária e encoder integrado para aplicações de robótica e controlo de movimento. É especificado para operação a 24V e suporta comunicação RS485 ou CAN quando utilizado com o driver recomendado.
Principais Características
- Motor sem escovas de alta potência + redutor de engrenagem planetária de alta precisão
- Torque nominal 4 N.m; torque máximo 7 N.m
- Relação de redução 1:10 (Tipo de redutor: PG5110)
- Encoder magnético de 18 bits (lado do motor)
- Opções de comunicação: RS485 ou CAN (com driver recomendado DG40E)
- Temperatura do motor: SIM
- Interface de sensor de temperatura dupla para monitorização em tempo real da temperatura do motor e do driver
- Destaques do driver mostrados: tensão de entrada 7.4-32V; comunicação RS485 ou CAN bus; encoders duplos com memória de ponto zero após desligar
Especificações
| Nome do Item | MG5010E-i10-V3 |
| Tensão Nominal | 24V |
| Velocidade Máxima | 320RPM |
| Velocidade Nominal | 235RPM |
| Torque Nominal | 4 N.m |
| Torque Máximo | 7 N.m |
| Corrente Nominal | 4.4A |
| Poder Máximo | 160W |
| Constante de Velocidade | 97.9 rpm/V |
| Constante de Torque | 0.1 N.m/A |
| Voltas | 13 |
| Tipo de Enrolamento | Y |
| Resistência de Fase | 0.466Ω |
| Indutância de Fase | 0.26mH |
| Pólos do Motor | 28 |
| Inércia do Rotor | 850 gcm² |
| Temperatura do Motor | SIM |
| Tipo de Redutor | PG5110 |
| Relação de Redução | 1:10 |
| Folga | 6 arcmin (também listado como ≤8 arcmin) |
| Carga Nominal do Rolamento | 1000N |
| Peso do Motor | 420g |
| Tamanho | Φ63*41.5 |
| Recomendar Motor | DG40E |
| Tensão de Entrada do Motor | 7.4-32V |
| Comunicação | RS485 OU CAN |
| Frequência de Comunicação | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | Encoder Magnético de 18 bits |
| Taxa de Baud do Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Taxa de Baud (CAN) | 1M |
| Modo de Controle | Laço de Torque (32KHz) / Laço de Velocidade (8KHz) / Laço de Posição (4KHz) |
| Curva de Aceleração | Aceleração Trapezoidal |
Definição da Interface
| Interface | Nota |
|---|---|
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| V- | Fonte de Alimentação Negativa |
| V+ | Fonte de Alimentação Positiva |
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| T | Transmissor UART |
| R | Receptor UART |
| G | GND de Sinal |
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos / robôs vestíveis
- Robôs quadrúpedes / plataformas de cães-robô
- Veículos AGV / carro AGV
- Robôs ARU
Para orientação na seleção e suporte à integração, contacte https://rcdrone.top/ ou envie um email para [email protected].
Manuais
Detalhes

MG5010E-i10-V3 integra um motor sem escovas e uma caixa de engrenagens planetária em um atuador compacto para robótica e controlo de movimento.

Um redutor planetário 1:10 ajuda a fornecer maior torque e estabilidade de posicionamento para construções de articulações e tração por rodas.


Um codificador magnético de 18 bits no lado do motor suporta feedback preciso; algumas configurações também utilizam um codificador auxiliar no lado do redutor.
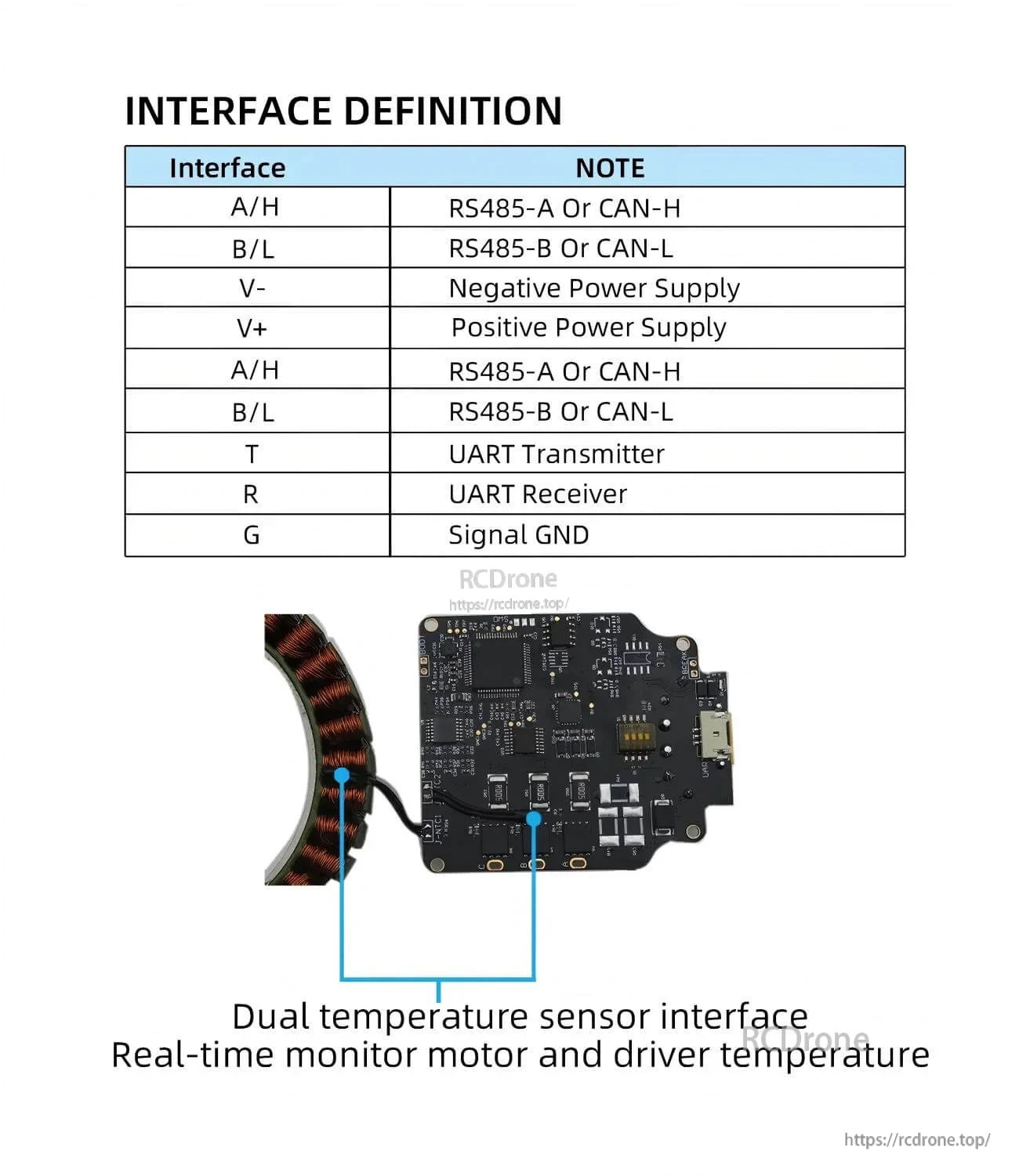
Definições de pinos claras e entradas de sensores de temperatura duplos simplificam a fiação e permitem monitorização térmica em tempo real do motor/módulo.
 Compatível com plataformas como AGVs, braços robóticos, quadrúpedes e robôs vestíveis onde é necessário um torque compacto.
Compatível com plataformas como AGVs, braços robóticos, quadrúpedes e robôs vestíveis onde é necessário um torque compacto.




