




Motor LKMTECH MG6012E-i8B-V3 48V Motor de Engrenagem Planetária 1:8 Travão RS485/CAN Encoder Magnético
Motor LKMTECH MG6012E-i8B-V3 48V Motor de Engrenagem Planetária 1:8 Travão RS485/CAN Encoder Magnético
LKMTECH
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O LKMTECH MG6012E-i8B-V3 Motor é um motor de engrenagem planetária de duas etapas com travões, projetado para atuadores de robótica e automação que requerem um tamanho compacto, alta saída de torque e comunicação digital.
Principais Características
- Motor de engrenagem planetária de dois estágios com travão
- Relação de engrenagem: 1:8
- Folga da engrenagem: arcmin (texto da imagem); 6 arcmin (especificação)
- Tamanho do motor: 80*60
- Encoder magnético absoluto de 18 bits de uma volta (texto da imagem)
- Configuração do encoder: 18bit (motor) + 14bit (redutor) encoder magnético
- Comunicação: RS485 ou CAN
- Motor recomendado: DG60Ev2; tensão de entrada do motor: 12-60V
- Encoders duplos, lembram o ponto zero após desligar (texto da imagem)
- Suporte a plataformas de desenvolvimento de código aberto como PC, MCU, PLC, ICP e RPi (texto da imagem)
- Modo de controlo (especificação): Laço de Torque (32KHz) / Laço de Velocidade (8KHz) / Laço de Posição (4KHz)
- Curva de aceleração: Aceleração trapezoidal
Para orientação na seleção ou suporte à integração, contacte [email protected] or visite https://rcdrone.top/.
Especificações
| Nome do Item | MG6012E-i8B-V3 |
| Tensão Nominal | 48V |
| Velocidade Máxima | 310RPM |
| Velocidade Nominal | 256RPM |
| Torque Nominal | 6N.m |
| Torque Máximo | 16N.m |
| Corrente Nominal | 3.5A |
| Poder Máximo | 294W |
| Constante de Velocidade | 42.7rpm/V |
| Constante de Torque | 1.09N.m/A |
| Voltas | 20 |
| Tipo de Enrolamento | Y |
| Resistência de Fase | 1.3 |
| Indutância de Fase | 0.55mH |
| Polos do Motor | 28 |
| Inércia do rotor | 930gcm2 |
| Temperatura do Motor | SIM |
| Tipo de Redutor | PG4108 |
| Relação de Redução | 1:8 |
| Folga | 6 arcmin |
| Carga Nominal do Rolamento | 1800N |
| Peso do Motor | 718g |
| Tipo de Freio | MT15 |
| Torque de Freio | 1.5N.m |
| Tensão de Partida | 24V |
| Poder de Partida | 17.5W |
| Tensão de Sustentação | 7V |
| Poder de Sustentação | 1.5W |
| Recomendar Drive | DG60Ev2 |
| Tensão de entrada do Drive | 12-60V |
| Comunicação | RS485 OU CAN |
| Frequência de Comunicação | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder Magnético de 18bit(motor)+14bit(reduzido) |
| Taxa de Baud do Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Taxa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Modo de Controle | Laço de Torque(32KHz)/Laço de Velocidade(8KHz)/Laço de Posição(4KHz) |
| Curva de Aceleração | Aceleração trapezoidal |
Definição da Interface (Texto da Imagem)
- Interruptor de ID
- Fonte de Alimentação Negativa
- Fonte de Alimentação Positiva
- CAN / RS485 (LH) (AB)
| Porta | Instruções |
|---|---|
| A/H | RS485-A Ou CAN-H |
| B/L | RS485-B Ou CAN-L |
| V- | Fonte de Alimentação Negativa |
| V+ | Fonte de Alimentação Positiva |
| A/H | RS485-A Ou CAN-H |
| B/L | RS485-B Ou CAN-L |
| T | Transmissor UART |
| R | Receptor UART |
| G | GND de Sinal |
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV / Carro AGV
- Robôs ARU
- Mecha Dog
- Robô de serviço
- Lidar portátil
- Robô de treino de reabilitação
- Robô de inspeção
Manuais
Detalhes

Um motor de engrenagem planetária compacto de dois estágios com travão para atuadores robóticos onde o alto torque e um envelope pequeno são importantes.
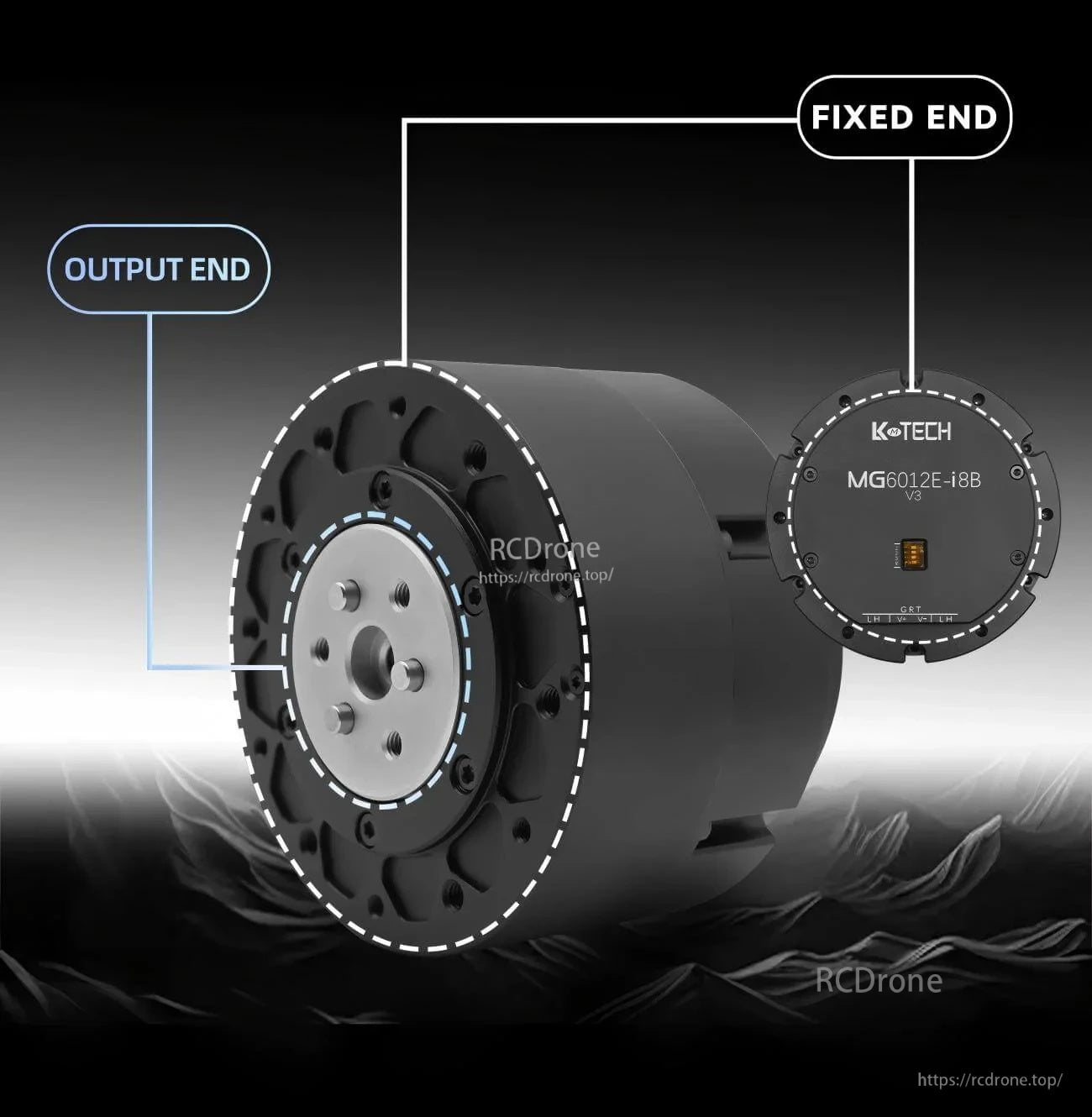
Tanto a extremidade de saída quanto a extremidade fixa são projetadas para montagem simples em juntas, braços e outras montagens de atuadores.

Um codificador magnético absoluto de 18 bits de uma volta e suporte de freio integrado garantem controle preciso e manutenção estável sob carga.
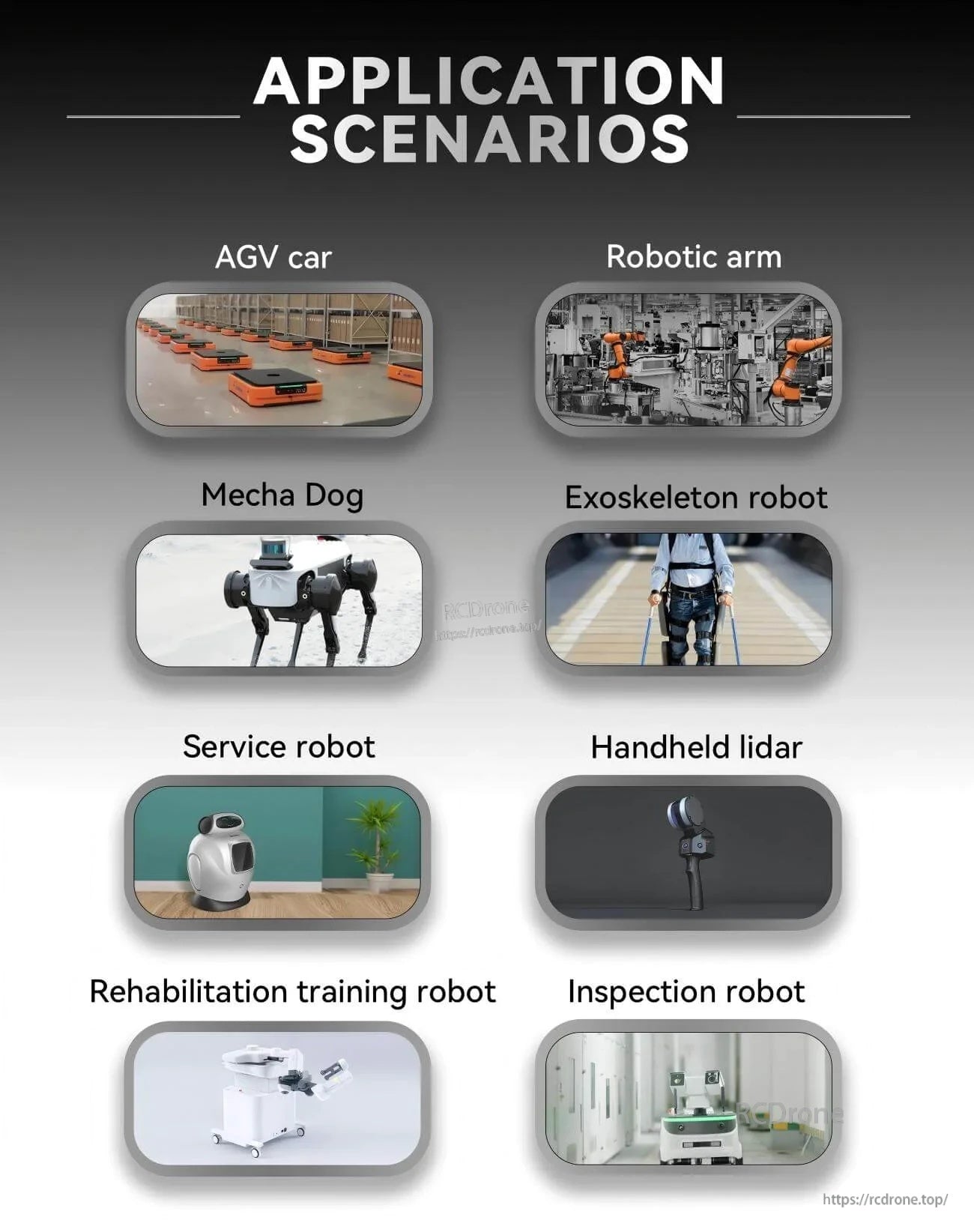
Adequado para projetos de automação, como módulos de acionamento AGV, braços robóticos, quadrúpedes, exoesqueletos e robôs de inspeção.
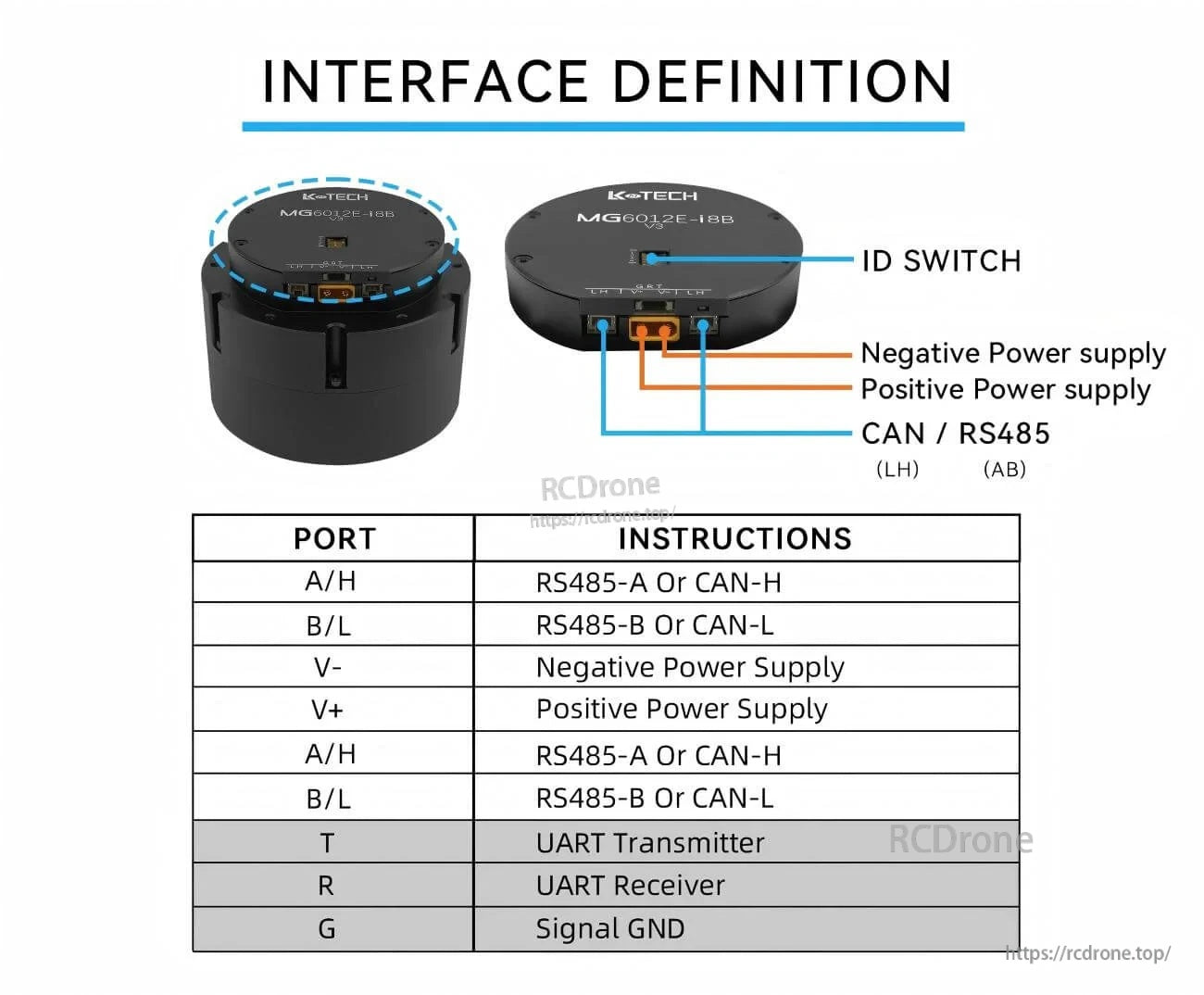
A rotulagem clara das portas ajuda a acelerar a fiação para alimentação, configuração de ID e comunicação RS485/CAN.
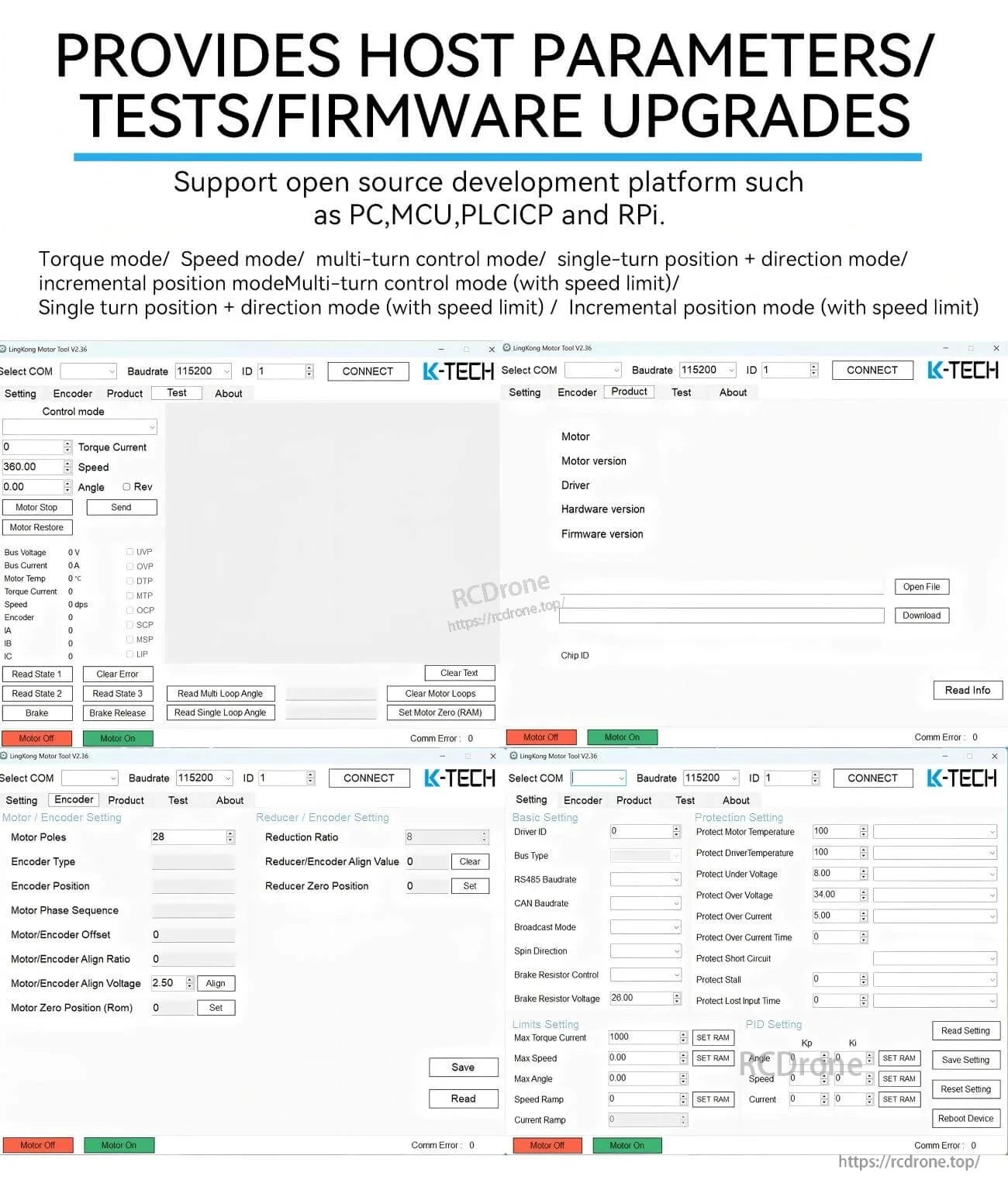
As ferramentas de host fornecem configuração de parâmetros, testes e atualizações de firmware em plataformas de desenvolvimento comuns.
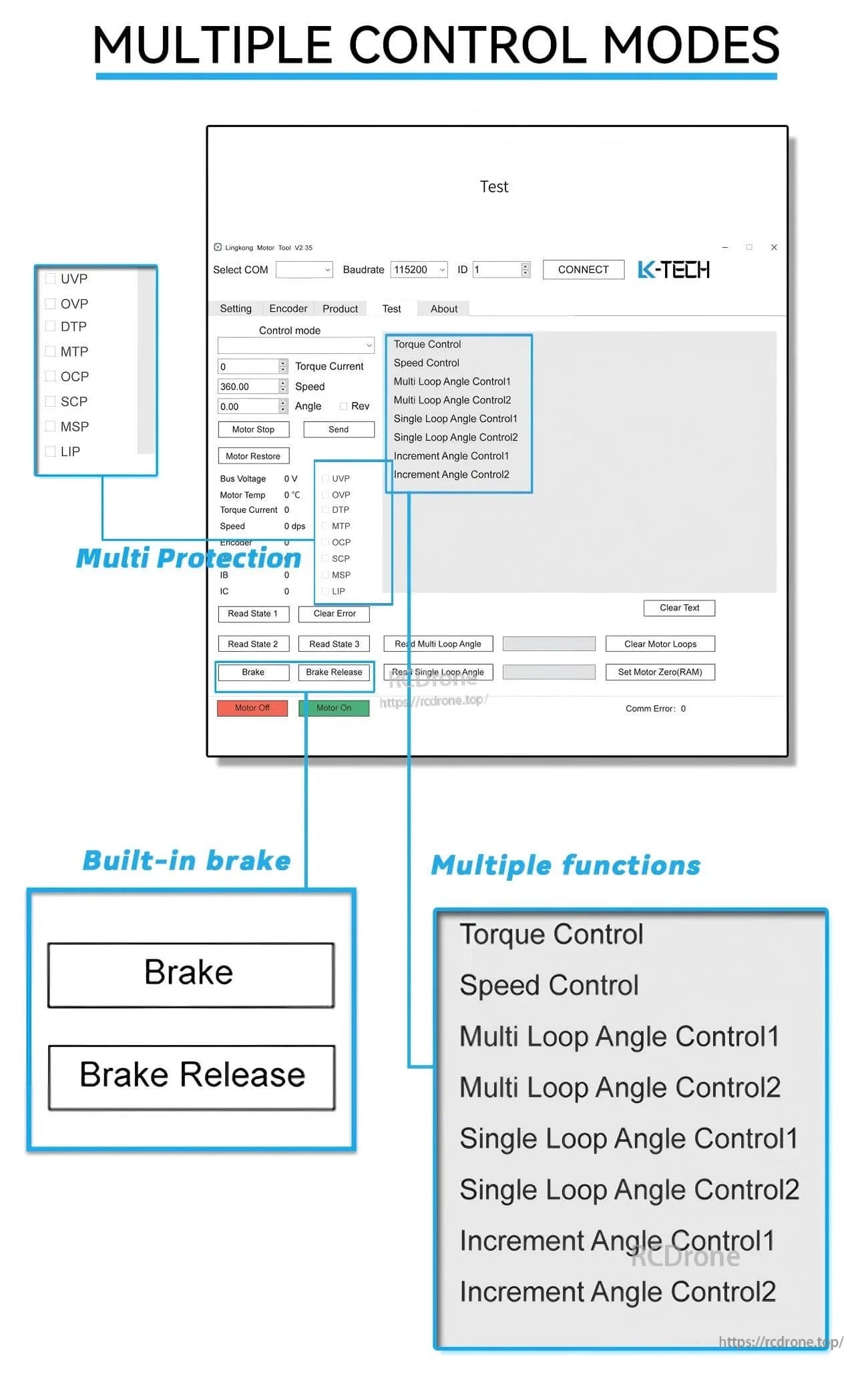
Modos de controle de torque, velocidade e posição podem ser selecionados para corresponder a diferentes atuadores e requisitos de controle de movimento.

Related Collections




