




Motor LKMTECH MHF6015-V3 24V 872RPM 3N.m Encoder Magnético 19bit RS485/CAN para Robótica
Motor LKMTECH MHF6015-V3 24V 872RPM 3N.m Encoder Magnético 19bit RS485/CAN para Robótica
LKMTECH
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O LKMTECH motor MHF6015-V3 é um motor sem escovas de 24V com um encoder magnético de 19 bits e comunicação RS485 ou CAN, projetado para aplicações de movimento robótico, como robôs humanoides, braços robóticos, exoesqueletos e veículos AGV.
Principais Características
- Design integrado: placa de acionamento embutida, MCU de alto desempenho, ajuste de parâmetros do host, pequeno volume e grande torque, encoder de valor absoluto de alta precisão.
- Design oco; tamanho oco marcado como 12,7 mm (12,6 mm mostrado dentro da chamada oca).
- Funciona suavemente; certificação CE (conforme declarado).
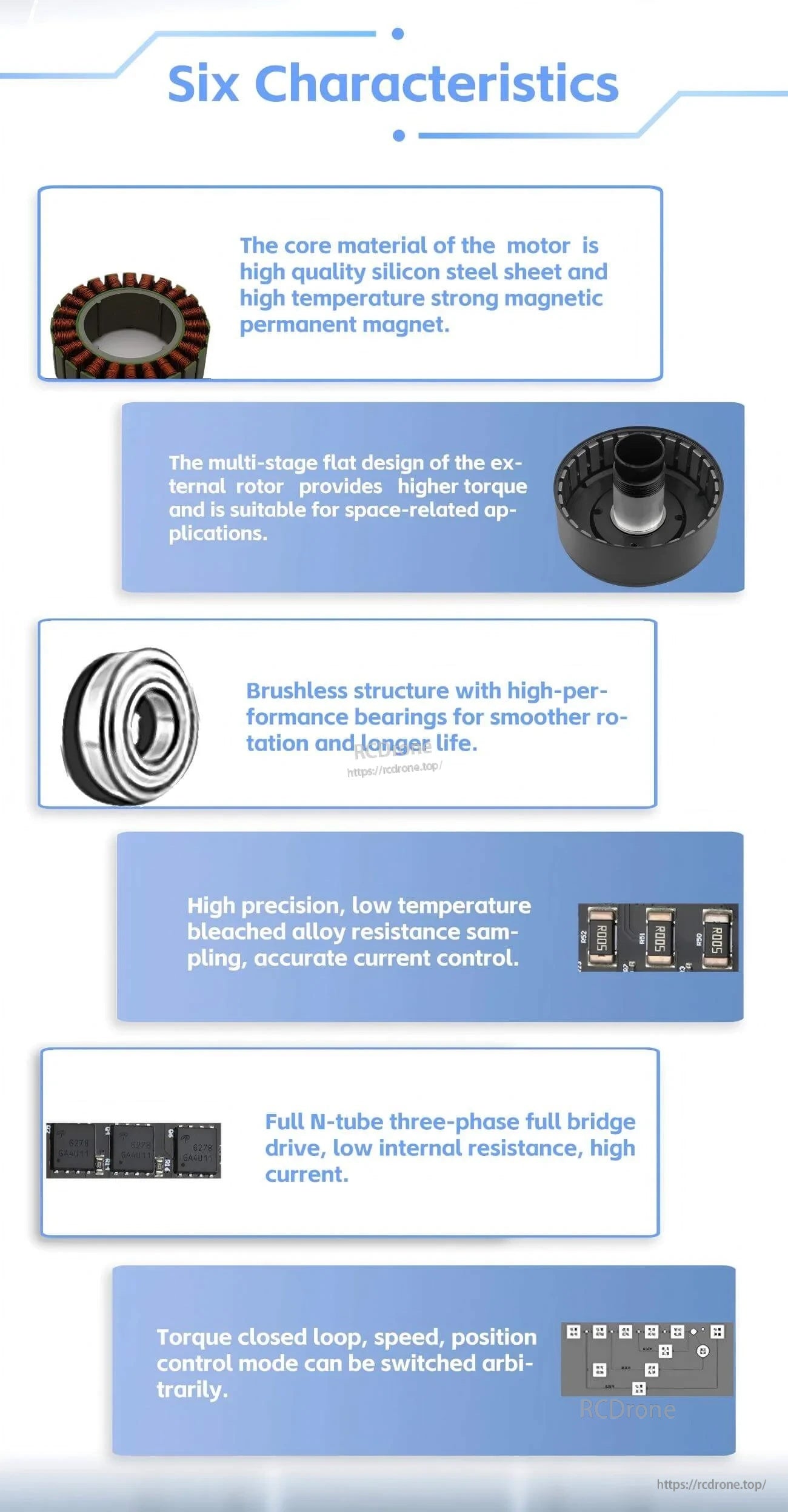
- Declaração de materiais principais: “O material principal do motor é chapa de aço silício de alta qualidade e ímã permanente de alta temperatura e forte magnetismo.”
- Declaração do rotor externo: “O design plano de múltiplos estágios do rotor externo proporciona maior torque e é adequado para aplicações relacionadas ao espaço.
- Declaração de rolamentos: “Estrutura sem escovas com rolamentos de alto desempenho para uma rotação mais suave e maior durabilidade.”
- Declaração de amostragem/controle de corrente: “Amostragem de resistência de liga branqueada de alta precisão e baixa temperatura, controle de corrente preciso.”
- Declaração de acionamento: “Acionamento de ponte completa de três fases com tubo N completo, baixa resistência interna, alta corrente.”
- Declaração de controle: “Laço fechado de torque, modo de controle de velocidade e posição pode ser alternado arbitrariamente.”
- Declaração de parâmetros/testes/atualizações de firmware do host; suporta plataformas de desenvolvimento de código aberto como PC, MCU, PLC, ICP e RPi.
- Declaração de modos: Modo de torque / Modo de velocidade / modo de controle de múltiplas voltas / modo de posição + direção de uma única volta / modo de posição incremental; modo de controle de múltiplas voltas (com limite de velocidade) / modo de posição + direção de uma única volta (com limite de velocidade) / modo de posição incremental (com limite de velocidade).
Especificações
| Nome do Item | MHF6015-V3 |
| Rotações | 25 |
| Tensão Nominal | 24V |
| Velocidade Máxima | 872RPM |
| Torque Nominal | 0.82N.m |
| Velocidade Nominal | 560RPM |
| Corrente Nominal | 3.1A |
| Poder Máximo | 57W |
| Torque Máximo | 3N.m |
| Constante de Velocidade | 23.3rpm/V |
| Constante de Torque | 0.26N.m/A |
| Tipo de Enrolamento | Y |
| Resistência de Fase | 2.17Ω |
| Indutância de Fase | 1.44mH |
| Pólos do Motor | 28 |
| Inércia do rotor | 515gcm² |
| Temperatura do Motor | SIM |
| Carga Nominal do Rolamento | 280N |
| Peso do Motor | 251g |
| Recomendar Drive | DHF50 |
| Tensão de entrada do Drive | 7.4-32V |
| Comunicação | RS485 OU CAN |
| Frequência de Comunicação | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder Magnético de 19 bits |
| Taxa de Baud do Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Taxa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Modo de Controle | Laço de Torque (24KHz)/Laço de Velocidade (8KHz)/Laço de Posição (8KHz) |
| Curva de Aceleração | Aceleração Trapezoidal |
Para orientação na seleção ou suporte à integração, entre em contato com a equipe de atendimento ao cliente em https://rcdrone.top/ ou envie um e-mail para [email protected].
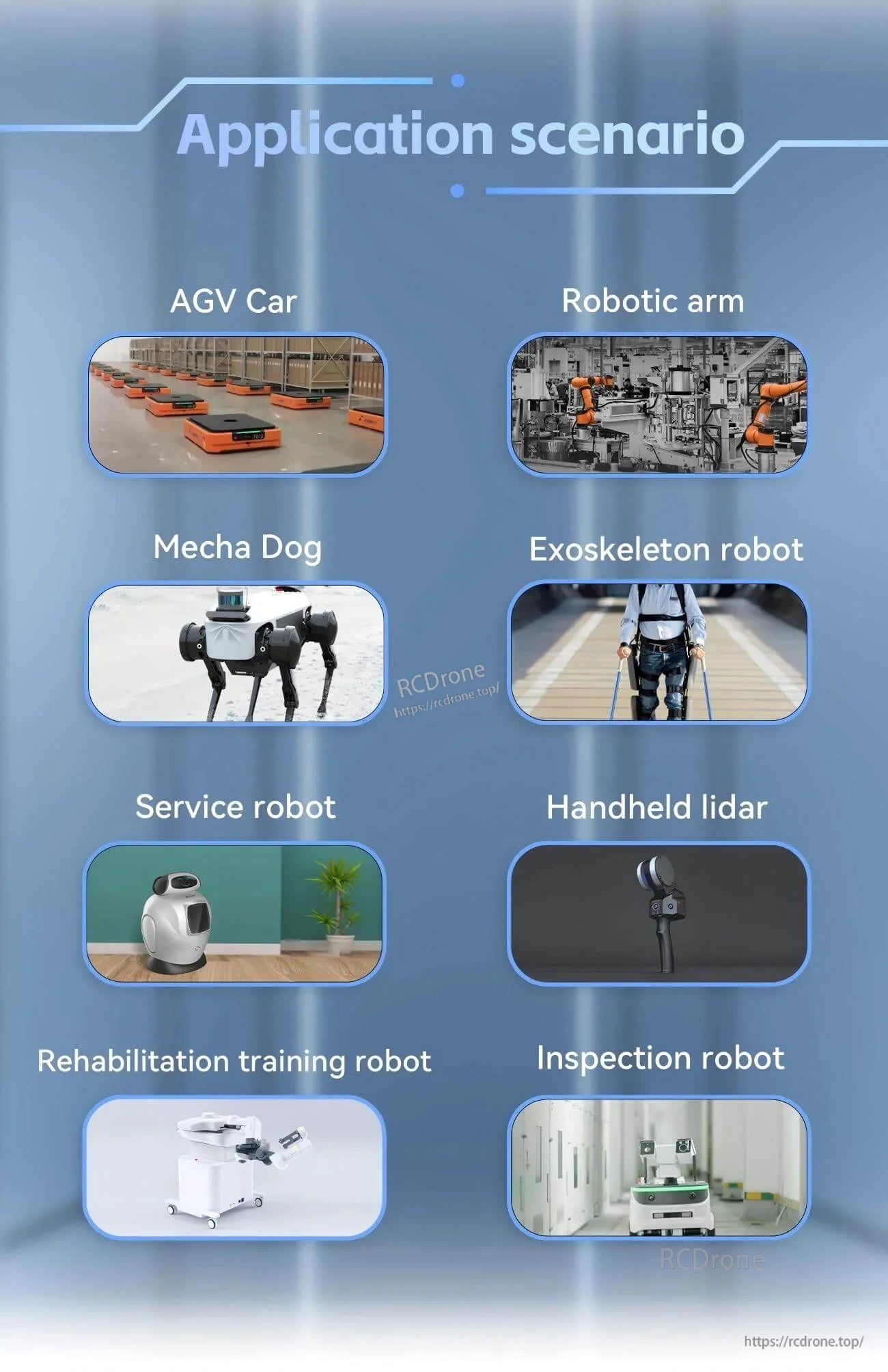
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos / robô exoesqueleto
- Robôs quadrúpedes / cão mecânico
- Veículos AGV / carro AGV
- Robôs ARU
- Robô de serviço
- Lidar portátil
- Robô de treino de reabilitação
- Robô de inspeção
Manuais / Documentos
Detalhes

Um formato de motor integrado compacto servo-mantém a fiação e a montagem simples para articulações robóticas.
Uma placa de acionamento integrada e MCU suportam a afinação de parâmetros a partir do host para uma comissionamento mais fácil.

O layout de eixo oco (bore de 12,7 mm) ajuda a direcionar cabos ou eixos através do motor para construções mais limpas.
Notas de design chave cobrem materiais, estrutura de torque de rotor externo, rolamentos e capacidades de controlo em malha fechada.
Projetado para tarefas de movimento em robótica, como AGVs, braços robóticos, quadrúpedes, exoesqueletos e robôs de serviço.
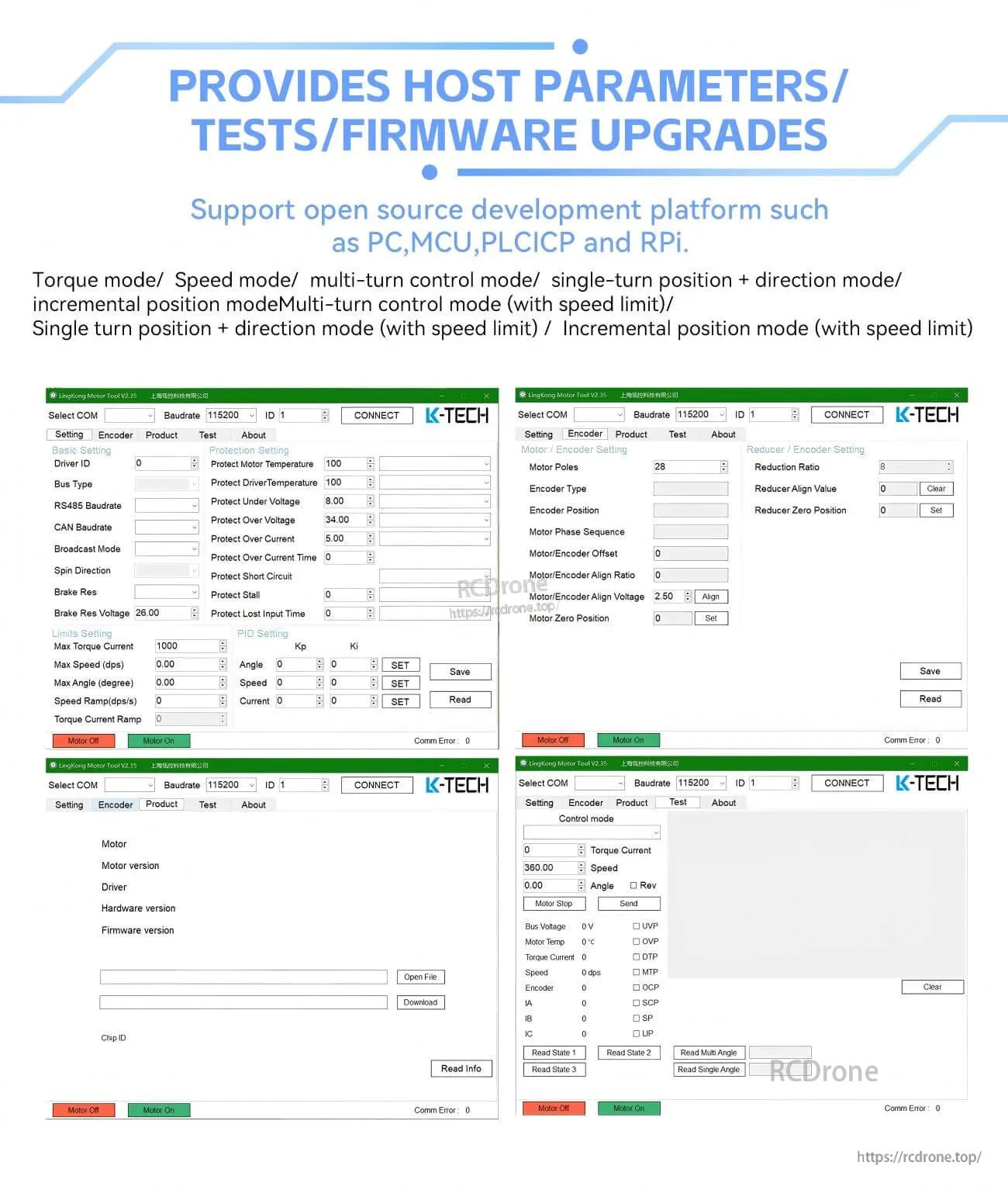
Páginas de software para PC ilustram configuração de parâmetros, funções de teste e suporte para atualização de firmware.

Related Collections




