




Motor MagicLab P110 360 N·m Binário Máximo, Encoder Duplo, Drive de Junta CAN/EtherCAT para Robôs Humanóides
Motor MagicLab P110 360 N·m Binário Máximo, Encoder Duplo, Drive de Junta CAN/EtherCAT para Robôs Humanóides
MagicLab
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Motor MagicLab P110 é um motor de acionamento de junta de alto torque, projetado para juntas robóticas, apresentando um sistema de duplo encoder e opções de comunicação de alta velocidade (CAN / EtherCAT). Está posicionado para juntas de alta carga, como atuadores de pernas em robôs humanoides de tamanho real e robôs quadrúpedes de grande porte de grau industrial.
Principais Características
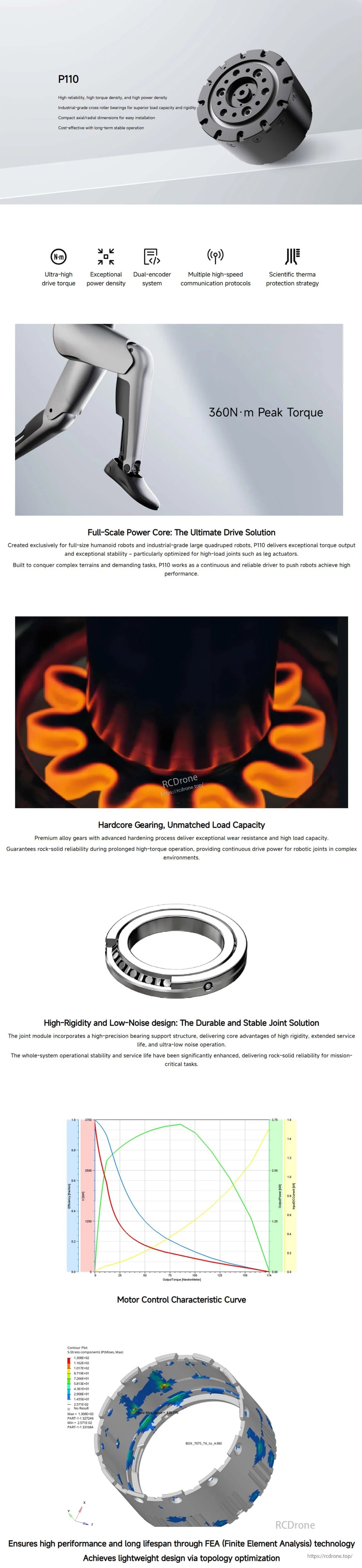
- Torque máximo de 360 N·m
- Torque de acionamento ultra-alto e densidade de potência excepcional
- Sistema de duplo encoder (resolução do encoder do motor: 15 Bit)
- Interface de comunicação: CAN / EtherCAT (múltiplos protocolos de comunicação de alta velocidade)
- Estratégia de proteção térmica científica
- Engrenagem robusta para capacidade de carga (engrenagens de liga premium com processo de endurecimento avançado)
- Design de alta rigidez e baixo ruído com uma estrutura de suporte de rolamento de alta precisão
- Tecnologia FEA (Análise de Elementos Finitos) para alto desempenho e longa vida útil; design leve mantendo a resistência
Aplicações
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
Especificações
| Velocidade Máxima | 20 rpm (Fonte de alimentação 24V) |
| Peso do Módulo | 1900g |
| Torque Nominal | 90 N·m |
| Torque de Pico | 360 N·m |
| Dimensões | Φ112*71.5 |
| Tensão de Operação | 48V - 54V |
| Corrente de Pico | 137 A |
| Interface de Comunicação | CAN / EtherCAT |
| Configuração do Encoder | Encoder Duplo |
| Resolução do Encoder do Motor | 15 Bit |
| Frequência de Controle | 25.000 Hz |
| Ambiente de Operação Recomendado | -5°C ~ 40°C |
Para questões de integração, interface ou configuração, contacte [email protected] or visite https://rcdrone.top/.
Detalhes
Construído para articulações humanoides e quadrúpedes de alta carga, o MagicLab P110 combina 360 N·m de torque de pico com feedback de encoder duplo e comunicação CAN/EtherCAT para uma atuação precisa e responsiva.
Related Collections




