Matek AP Periph CAN Node CAN-G474 Placa Adaptadora DroneCAN, STM32G474CE 512KB, CANFD 5Mbit/s
Matek AP Periph CAN Node CAN-G474 Placa Adaptadora DroneCAN, STM32G474CE 512KB, CANFD 5Mbit/s
MATEKSYS
Não foi possível carregar a disponibilidade de recolha
Visão Geral
Este Nó AP Periph CAN, o Matek Nó AP Periph CAN CAN-G474, é um nó adaptador ArduPilot AP_Periph projetado para adicionar periféricos a um barramento DroneCAN usando um transceptor CAN de 5Mbit/s e um MCU STM32G474. Permite que sensores suportados pelo ArduPilot e periféricos baseados em GPIO (como saídas PWM e módulos de notificação LED) sejam integrados através do DroneCAN.
Principais Características
- Adaptador baseado no firmware ArduPilot AP_Periph
- MCU STM32G474CE com 512KB Flash
- Hardware compatível com CANFD com suporte CAN/CANFD de 1Mbit ~ 5Mbit
- 2x barramento CAN
- 4x UARTs para GNSS, Medidor de Distância, Proximidade, EFI, entrada RC (receptor); MSP ativado no TX3 por padrão para GNSS, Bússola, Barômetro via MSP
- 2x barramento I2C para periféricos I2C (Sensor de Velocidade do Ar, Barômetro, Bússola)
- 1x SPI para RM3100 (pads SPI no lado inferior com impressão de seda “CS, MOSI, MISO, SCK”)
- 11x saídas PWM para Servos e ESC; todos os PWMs suportam DMA/DShot (PWM1-10 no DuPont 2.54mm buracos; pad PWM11 no lado inferior com impressão de seda “11”
- Suporte para atualização de firmware via DroneCAN GUI Tool / Mission Planner (Aba DroneCAN) e via modo DFU do STM32CubeProgrammer (UART1)
Especificações
| MCU | STM32G474CE |
| Flash | 512KB |
| Taxa de dados do transceptor CAN | Até 5Mbit/s |
| Suporte para CAN / CANFD | 1Mbit ~ 5Mbit CAN/CANFD |
| Barramento CAN | 2x |
| UART | 4x (MSP ativado no TX3 por padrão) |
| I2C | 2x |
| SPI | 1x (para RM3100) |
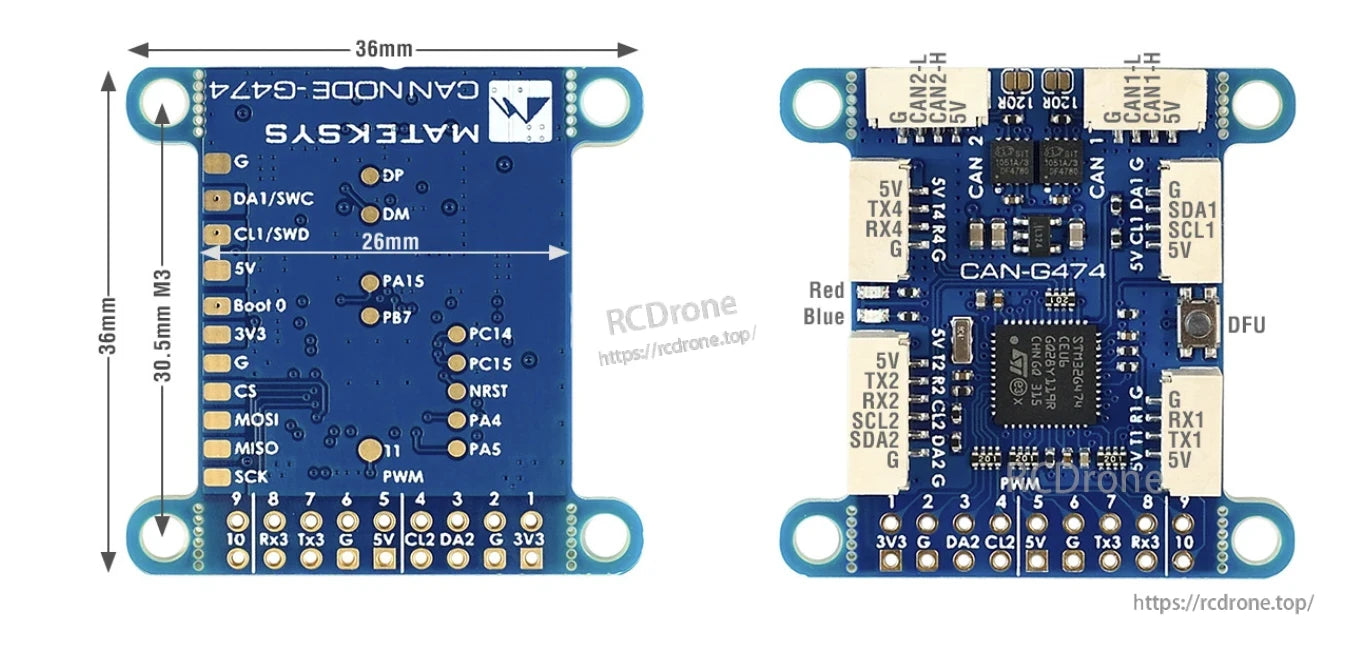
| Saídas PWM | 11x (PWM1-10 no DuPont 2.54mm buracos; pad PWM11 no lado inferior) |
| Depuração | Depuração ST, SWC & SWD (no lado inferior) |
| Atualização de firmware (DFU) | UART1 (TX1, RX1) |
| Indicadores LED | Piscar azul rápido: A iniciar; Piscar azul lento: a comunicar com o controlador de voo; Vermelho: indicador de 3.3V |
| Faixa de tensão de entrada | 4.5~5.5V @pad/pino de 5V& |
| Consumo de energia | 62mA |
| Temperaturas de operação | -30~85 °C |
| Conectores | 5x JST-GH-4P (SM04B-GHS-TB) para CAN1, CAN2, I2C1, UART1, UART4; 1x JST-GH-6P (SM06B-GHS-TB) para UART3+I2C2 |
| Buracos passantes | 18x DuPont 2.54mm buracos |
| Tamanho da placa | 36mm*36mm*6mm |
| Peso | 5.2g |
| Montagem | 30.5mm 4x Diâmetro.3mm |
O que está incluído
- 1x placa CAN-G474
- 2x fio de silicone JST-GH-4P para JST-GH-4P de 20cm
- 1x fio de silicone JST-GH-6P para JST-GH-6P de 20cm
Serviço ao cliente: https://rcdrone.top/ ou [email protected]
Aplicações
- Converter periféricos suportados pelo ArduPilot para periféricos do barramento DroneCAN (GNSS, bússola, barómetro, sensor de velocidade do ar, medidor de distância, sensor de proximidade, injetores eletrónicos de combustível)
- Periféricos baseados em GPIO no DroneCAN, incluindo módulos de notificação PWM e LED
- Conexões de periféricos de exemplo mostradas: Medidor de distância, GPS & Bússola, Sensor de Velocidade do Ar, ENTRADA RC, MONITOR DE BATERIA I2C
- Opção de redundância: conectar um barramento CAN ao controlador de voo ou conectar ambos
Manuais
- Downloads de firmware (ArduPilot AP_Periph): https://firmware.ardupilot.org/AP_Periph/
- MatekG474-Periph (para sensores periféricos)
- MatekG474-DShot (para saída DroneCAN-PWM)
- Métodos de atualização
- Ferramenta GUI DroneCAN ou Mission Planner – Aba DroneCAN, carregar “AP_Periph.bin”
- Modo DFU do STM32CubeProgrammer: conectar o módulo USB-TTL ao UART1, ligar o USB enquanto mantém pressionado o botão DFU, carregar “AP_Periph_with_bl.hex”
- Arquivo 3D: CAN-G474_STEP.zip
- Tutorial: Usando adaptadores MatekL431 para PWM e DShot
Detalhes
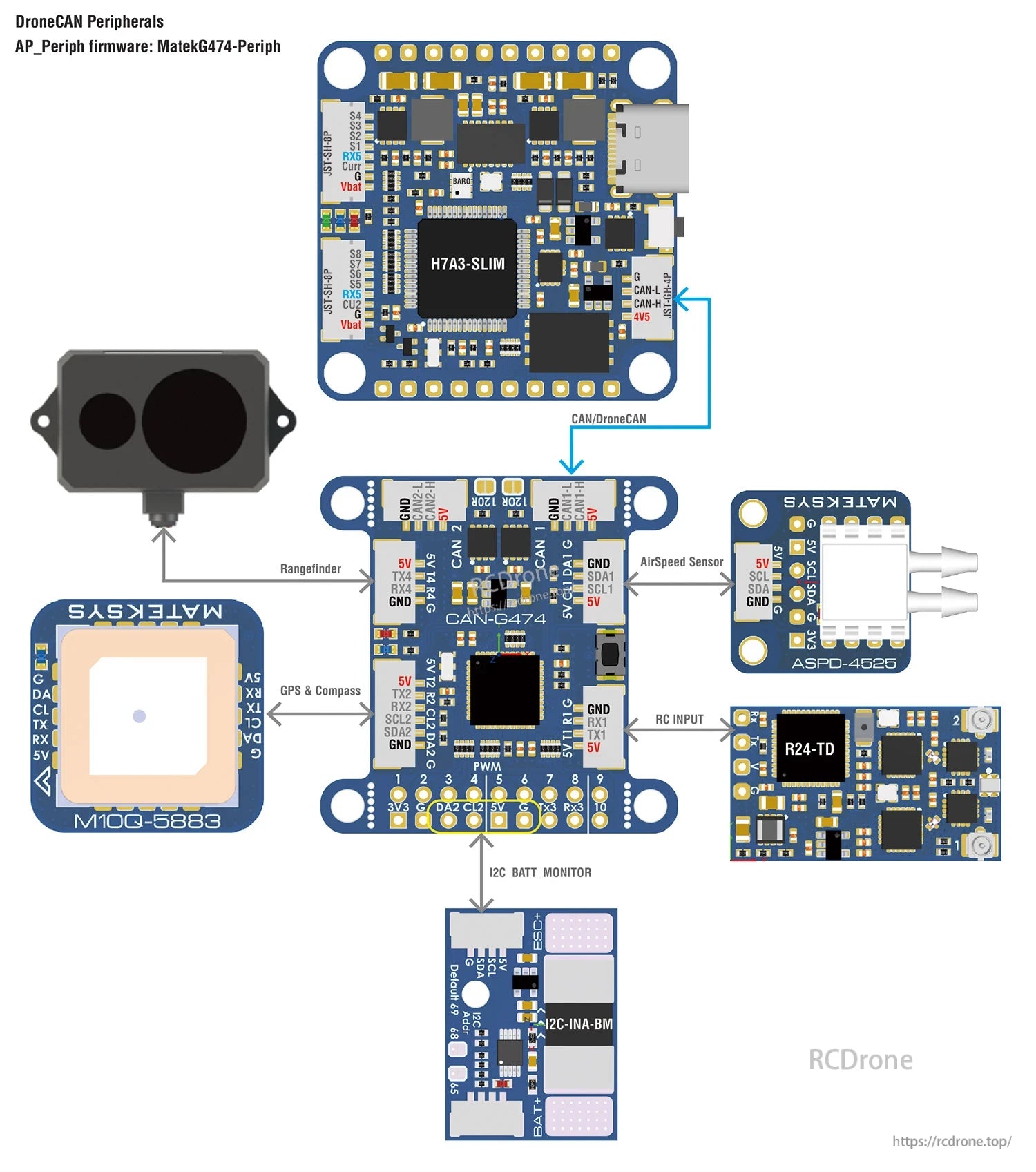
A placa Matek CAN-G474 fornece uma porta DroneCAN/CAN juntamente com pads UART, I2C e PWM para conectar periféricos comuns de piloto automático.A placa Matek CAN-G474 conecta-se a um barramento CAN/DroneCAN e disponibiliza até 10 saídas PWM para servos ou ESCs.
Related Collections