MATEK Mateksys AP_PERIPH PODE NÓ L431
MATEK Mateksys AP_PERIPH PODE NÓ L431
MATEKSYS
Não foi possível carregar a disponibilidade de recolha
MATEK Mateksys AP_PERIPH CAN NODE L431 ESPECIFICAÇÕES
Uso: Veículos e brinquedos de controle remoto
Idade recomendada: 12+a,14+a,3-6a,6-12a,0-3a
Origem: China Continental
Material: Material Composto
Marca: MATEKSYS
AP_PERIPH PODE NÓ L431
AP_Periph, Nó CAN, DroneCAN, L431


-
CAN-L431 é um nó adaptador baseado no firmware ArudPilot AP_Periph.
-
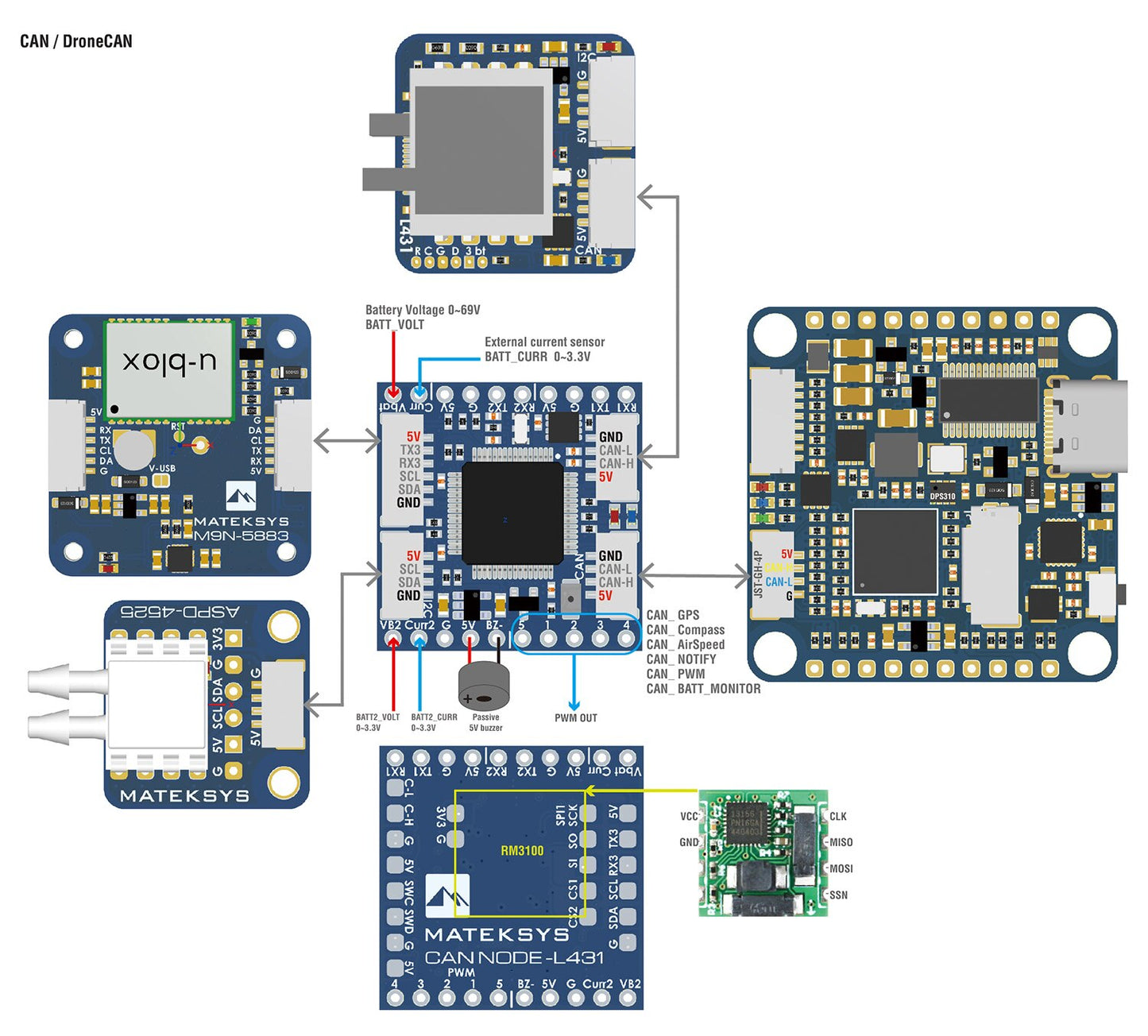
Com esta placa, você pode utilizar facilmente a biblioteca de driver ArduPilot para converter GNSS, bússola, barômetro, sensor de velocidade do ar e periféricos baseados em GPIO (PWM, campainha/LED notificados) suportados pelo ArduPilot em periféricos de barramento DroneCAN.
Especificações
-
MCU: STM32L431xC, flash de 256 KB
-
Taxas de dados do transceptor CAN de até 5 Mbit/s na fase rápida CAN FD
-
1x CAN, protocolo DroneCAN (2x conectores GH-4P em paralelo)
-
3x UARTs
-
UART1, sobressalente
-
UART2, padrão MSP, DFU
-
UART3, GPS padrão
-
-
1xI2C
-
para sensor periférico de velocidade no ar
-
para barômetro periférico
-
para Bússola periférica QMC5883L
-
-
1x SPI
-
para periférico RM3100
-
-
4x ADC
-
BATT_VOLT, PIN 5
-
BATT_CURR, PIN 6
-
BATT2_VOLT, PIN 15
-
BATT2_CURR, PIN 16
-
-
5 saídas PWM
-
1x GPIO com TIM16 para campainha
-
Depuração ST, SWCLK e SWDIO
-
LED
-
Azul, piscando rapidamente, inicializando
-
Azul, piscando lentamente, funcionando
-
Vermelho, indicador de 3,3 V
-
Faixa de tensão de entrada: 4,5~5,5V @5V pad/pin
-
Consumo de energia: 40mA
-
Temperaturas operacionais
-
Físico
-
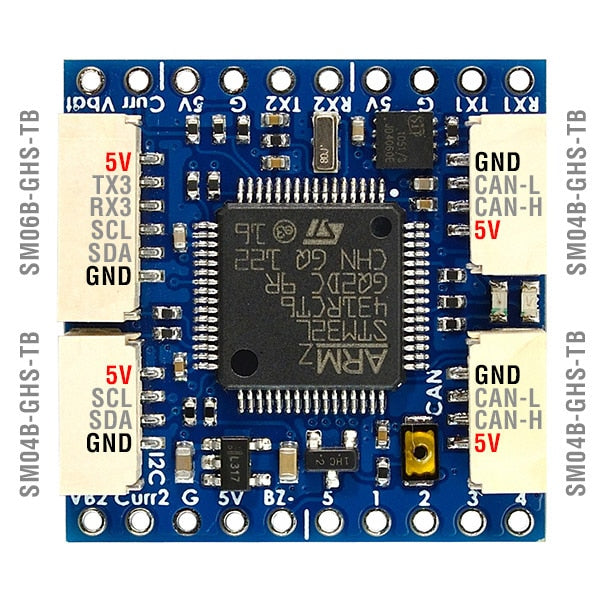
2x JST-GH-4P(SM04B-GHS-TB) para CAN
-
1x JST-GH-4P(SM04B-GHS-TB) para I2C
-
1x JST-GH-6P(SM06B-GHS-TB) para UART3+I2C
-
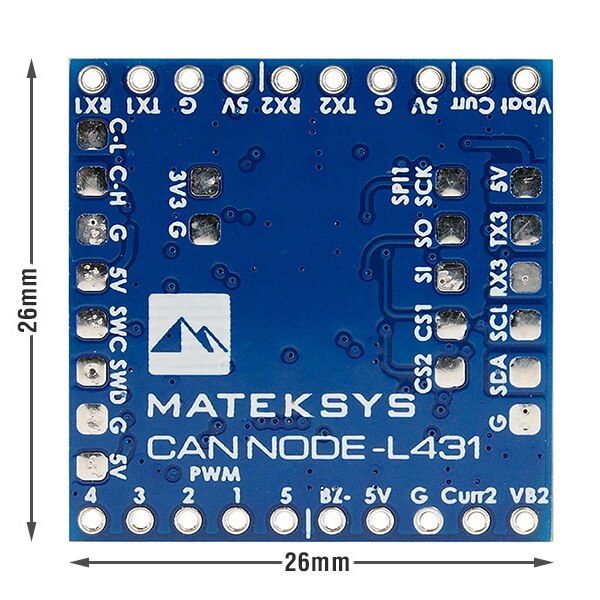
Tamanho da placa: 26mm*26mm*6mm. 3,7g
-
Arquivo 3D: CAN-L431_STEP.zip
-
-
Firmware
-
ArduPilot AP_Periph MatekL431-Periph ou MatekL431-Airspeed
-
Atualização via ferramenta GUI DroneCAN
-
Embalagem
-
1x placa CAN-L431
-
1x fio de silicone JST-GH-4P para JST-GH-4P de 20 cm
-
1x fio de silicone JST-GH-6P para JST-GH-6P de 20cm
Dicas
-
Firmware MatekL431-Periph suporta bússola I2C QMC5883L por padrão
-
Se você conectar outra bússola I2C a esta placa, será necessário atualizá-la com este firmware via DroneCAN GUI ou modo SLCAN no Mission Planner.
-
Related Collections