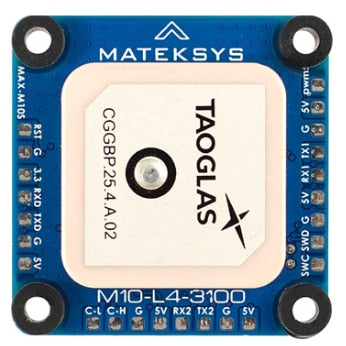
Módulo GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
Módulo GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Não foi possível carregar a disponibilidade de recolha
MATEK M10-L4-3100 - ESPECIFICAÇÕES GNSS Mateksys AP_PERIPH
Uso: Veículos e brinquedos de controle remoto
Idade recomendada: 12+a,14+a,6-12a
Origem: China Continental
Material: Material Composto
Marca: MATEKSYS
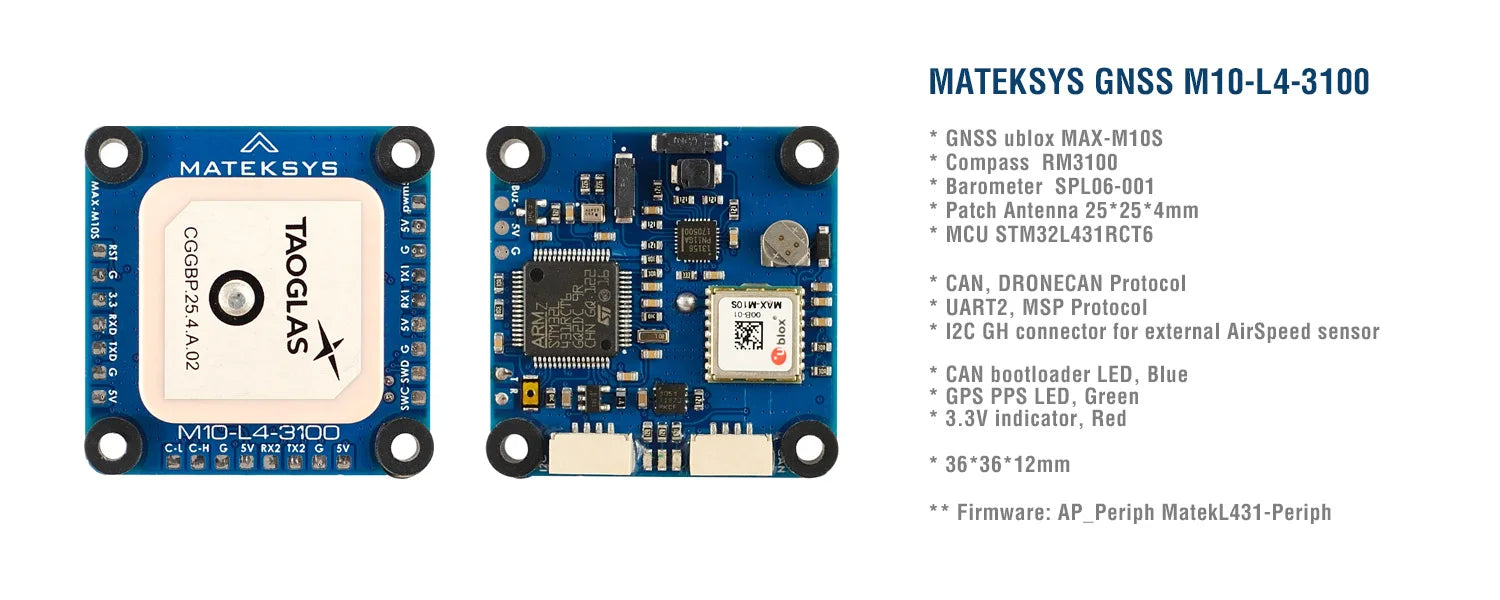
AP_PERIPH GNSS M10-L4-3100
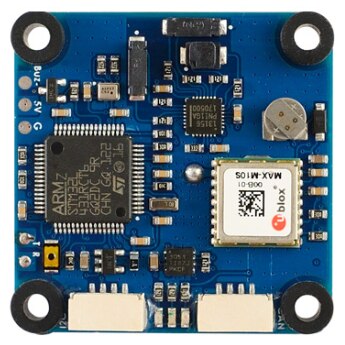
Nó CAN AP_Periph L431, MAX-M10S, RM3100, SPL06-001, protocolo DroneCAN e UART_MSP
-
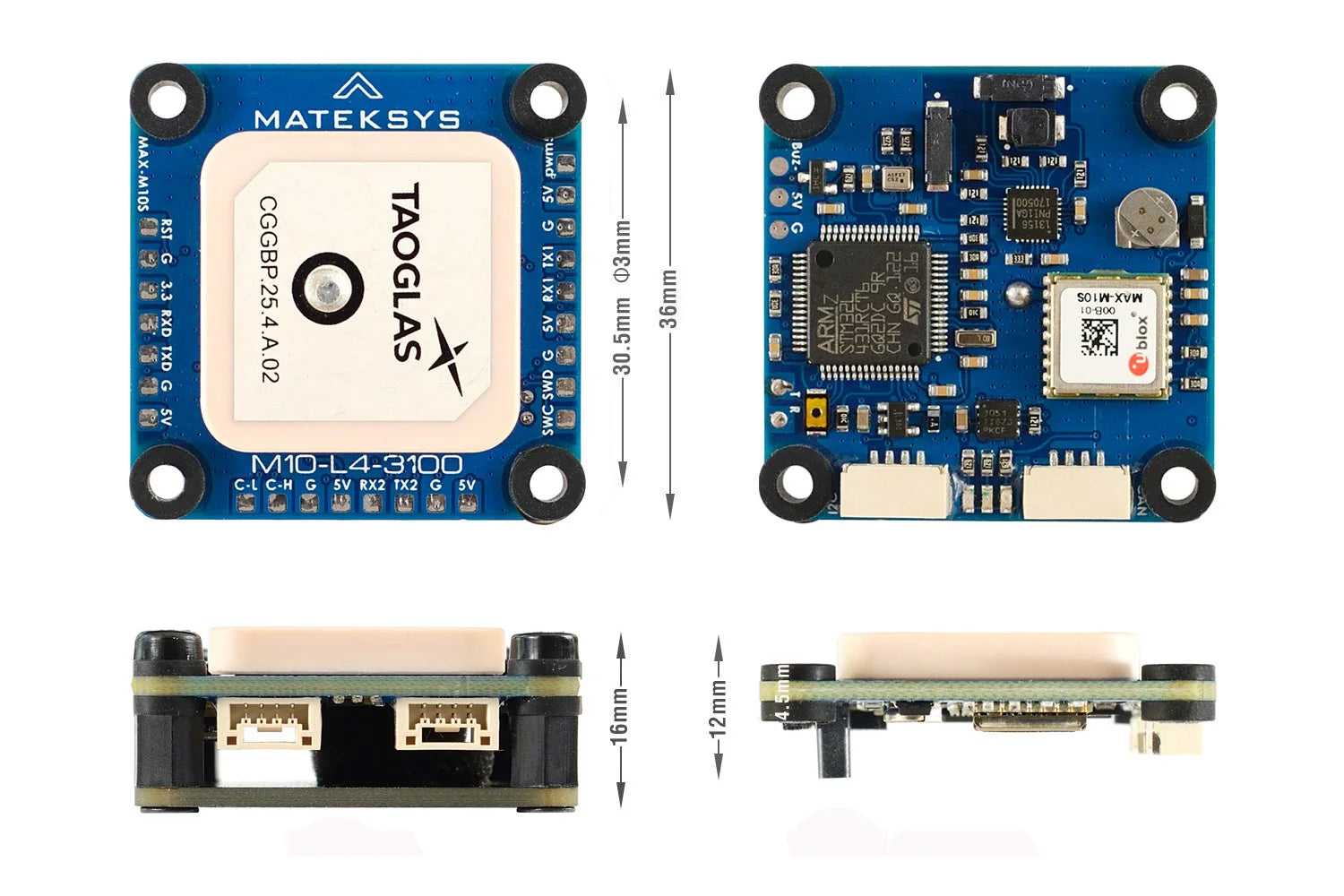
M10-L4-3100 é baseado no firmware AP_Periph da ArudPilots. É um periférico GNSS+COMPASS+BARÔMETRO com interfaces CAN/DroneCAN e UART/MSP.
-
M10-L4-3100 usa GNSS multiconstelação alimentado por u-blox MAX-M10S, MAX-M10S é um receptor GNSS simultâneo que pode receber e rastrear vários sistemas GNSS. Devido à arquitetura front-end RF multibanda, todas as quatro principais constelações GNSS, GPS, Galileo, GLONASS e BeiDou podem ser recebidas simultaneamente.
-
M10-L4-3100 integra uma bússola de nível industrial PNI RM3100 que fornece alta resolução, baixo consumo de energia, sem histerese, grande faixa dinâmica e altas taxas de amostragem.
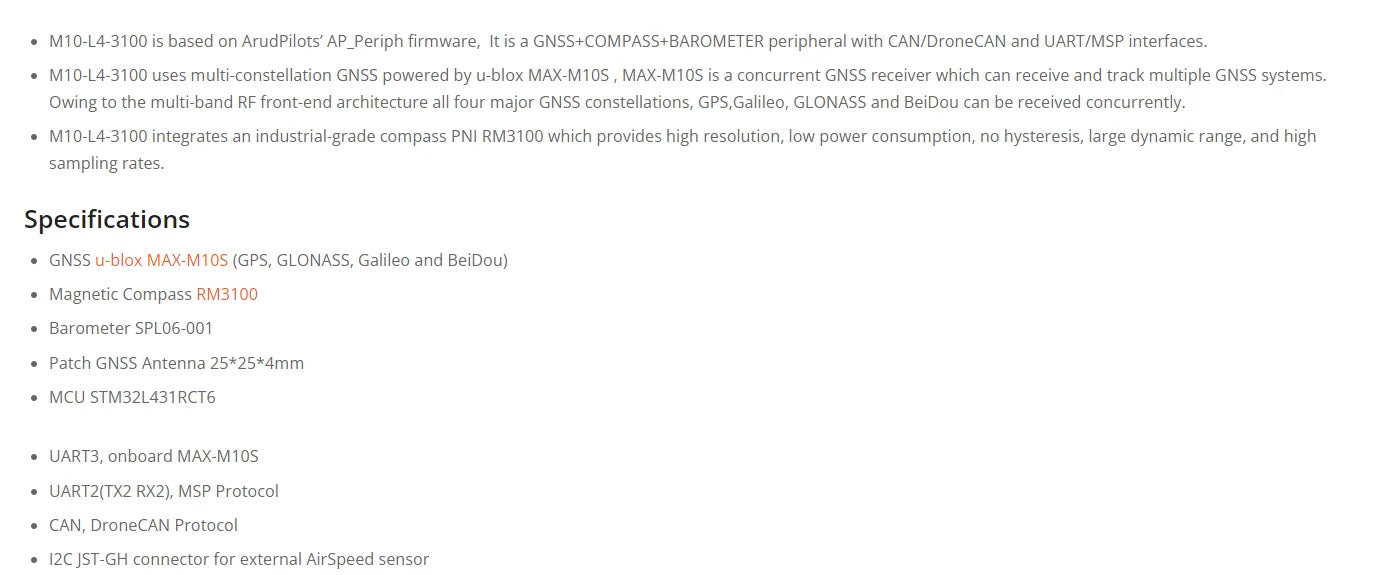

a configuração padrão em MAX-M1OS com Ublox FWS . é a recepção simultânea de GPS, Galileo e BeiDou BI com QZSS e SBAS habilitados. GLONASS está desabilitado por padrão Beidou B1I (1575,42 MHz) e não pode ser habilitado ao mesmo tempo.
Conexão CAN (protocolo UAVCAN)
-
M10-L4-3100 5V — FC 4,5 V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN alto
-
M10-L4-3100 CAN-L — FC CAN baixo
-
M10-L4-3100 G —FC G/GND
Parâmetros FC UAVCAN (ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (certifique-se de que DroneCAN está desmarcado)
———————————
Se você conectar o sensor de velocidade no ar I2C à porta I2C do M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
E você deve definir os parâmetros do nó CAN para o sensor de velocidade no ar conectado à porta I2C de M10-L4-3100
Planejador de missão > Configuração inicial > Hardware opcional > UAVCAN > Modo SLCan CAN1 > Parâmetros
-
MS4525 ARSP_TYPE -> 1 (padrão em hwdef)
-
MS5525 ARSP_TYPE -> 3 suporta MS5525 apenas com endereço 0x77
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Gravar e reinicializar
———————————
Se você conectar 2812LED DIN ao bloco PWM5
-
NTF_LED_TYPES -> (certifique-se de que DroneCAN esteja marcado)
Modo SLCan CAN1 > Parâmetros
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw deve ser “MatekL431-Periph”, o recurso MSP está desativado em “MatekL431-GPS”
Conexão UART (protocolo MSP)
-
M10-L4-3100 5V — FC 4,0V ~ 5,3V
-
M10-L4-3100 TX2 — FC sobressalente UART_RX
-
M10-L4-3100 RX2 — FC UART_TX sobressalente (não essencial)
-
M10-L4-3100 G — FC G/GND
ArduPilot (desde 4.1.x) Parâmetros FC
-
Serialx_PROTOCOL = 32 (MSP) onde x é a porta SERIAL usada para conexão no piloto automático.
-
Serialx_BAUD = 115 onde x é a porta SERIAL usada para conexão no piloto automático.
-
TIPO GPS = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (se quiser usar o baro MSP como baro primário, caso contrário deixe como padrão)
-
COMPASS_TYPEMASK 0 (ou verifique se o bit MSP não está marcado)
INAV (desde 2.6) Parâmetros FC
-
M10-L4-3100 é compatível com qualquer controlador de vôo suportado pelo INAV através de um UART sobressalente.
-
Na guia de portas, ative o MSP no UART correspondente ao M10-L4-3100 conectado. NÃO ative o "GPS" nesse UART. selecione Taxa de transmissão 115200.
-
recurso GPS
-
definir provedor_gps = MSP
-
definir mag_hardware = MSP
-
definir baro_hardware = MSP
-
defina align_mag = CW90, se a bússola estiver montada plana com a seta voltada para frente e a seta do controlador de vôo também estiver voltada para frente.
Related Collections