MATEK F405-WTE - CONTROLADOR DE VÔO Mateksys
MATEK F405-WTE - CONTROLADOR DE VÔO Mateksys
MATEKSYS
Não foi possível carregar a disponibilidade de recolha
MATEK F405-WTE - ESPECIFICAÇÕES DO CONTROLADOR DE VÔO Mateksys
Uso: Veículos e brinquedos de controle remoto
Idade recomendada: 12+a,14+a
Origem: China Continental
Material: Material Composto
Marca: MATEKSYS
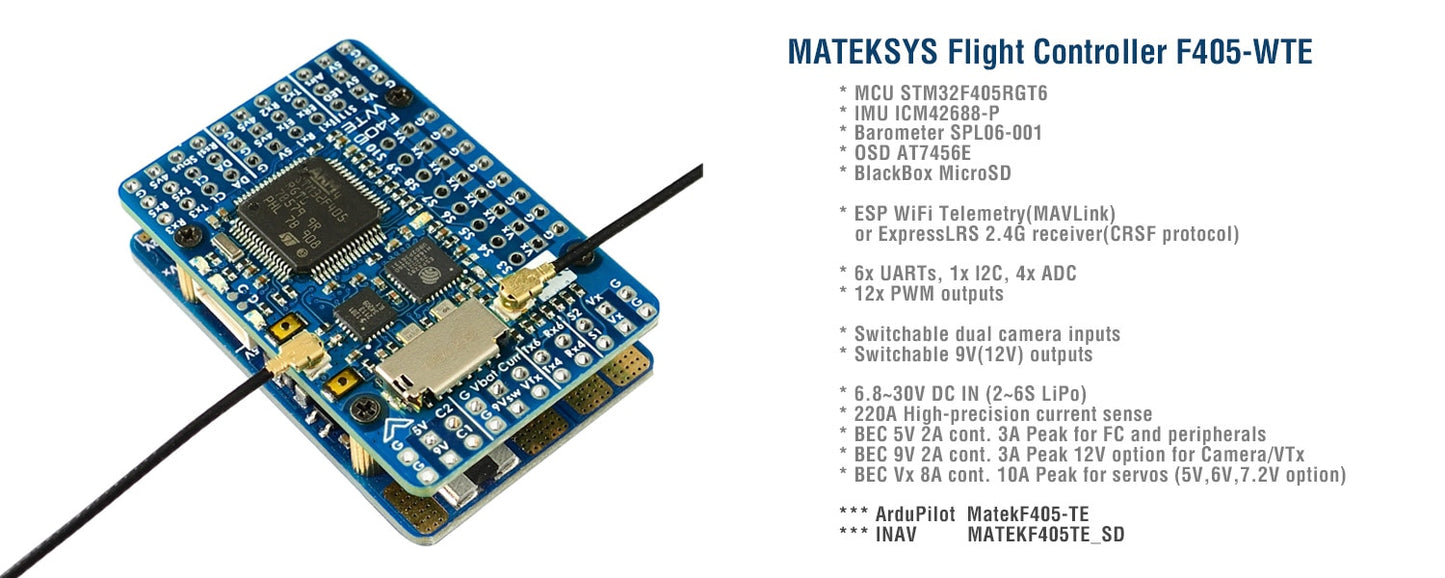
CONTROLADOR DE VÔO F405-WTE
STM32F405RGT6, ICM42688P, SPL06, OSD, telemetria ESP WIFI/receptor ELRS 2.4G, 6xUARTs, 12x PWM, 1xI2C
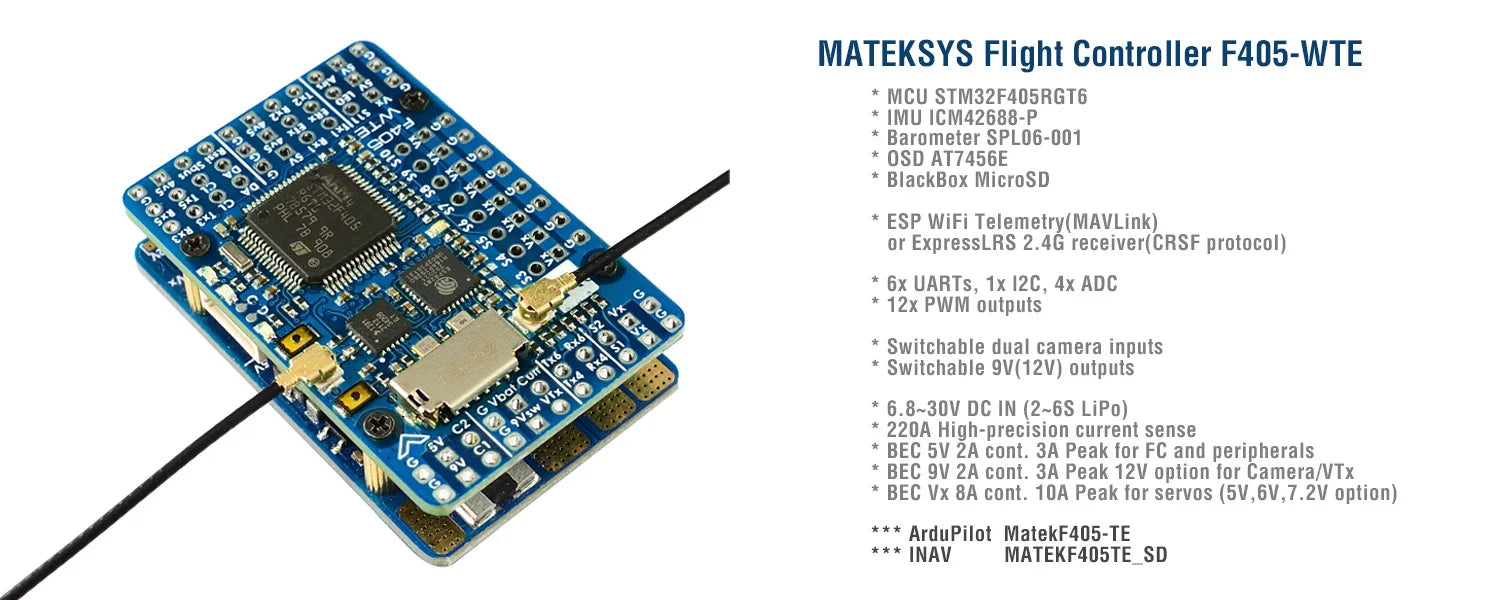
MATEKSYS Flight Controller F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P Barômetro SPLO6-001 OSD AT7456E BlackBox MicroSD 2 8 2 2 2 ESP WiFi Telemetria (MAVLink) 2 ou receptor ExpressLRS 2.4G (protocolo CRSF) 6x UARTs, Ix I2C, 4x ADC 85 12x saídas PWM Entradas de câmera dupla selecionáveis 4+

Especificações FC
-
MCU: STM32F405RGT6, 168MHz, 1MB Flash
-
IMU: ICM42688-P
-
Baro: SPL06-001
-
OSD: AT7456E
-
Caixa preta: slot para cartão MicroSD
-
Telemetria ESP WiFi (MAVLink, 14dBm)
-
Receptor ExpressLRS 2.4G (protocolo CRSF, Telemetria 12dBm)
-
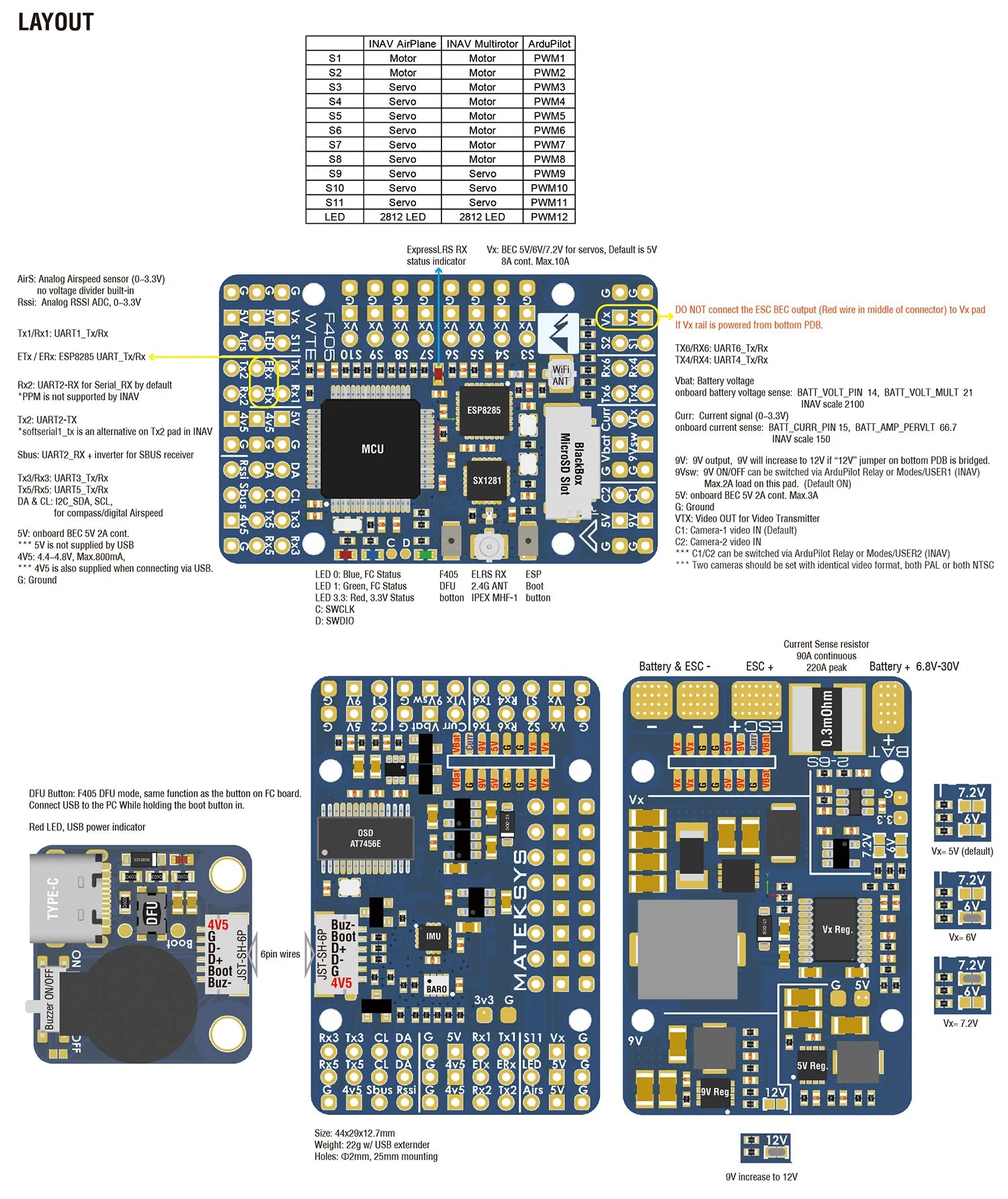
6x UARTs, 1x opção Softserial_Tx (INAV)
-
12x saídas PWM
-
1x I2C
-
4x ADC (VBAT, Corrente, RSSI, Velocidade do ar)
-
Extensor USB/Beep com Tipo-C(USB2.0)
-
Interruptor de entrada de câmera dupla
-
9V(12V) para interruptor de alimentação VTX
Firmware FC
-
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD (não disponível no configurador INAV 4.x)
PDB
-
Faixa de tensão de entrada: 6,8~30V (2~6S LiPo)
-
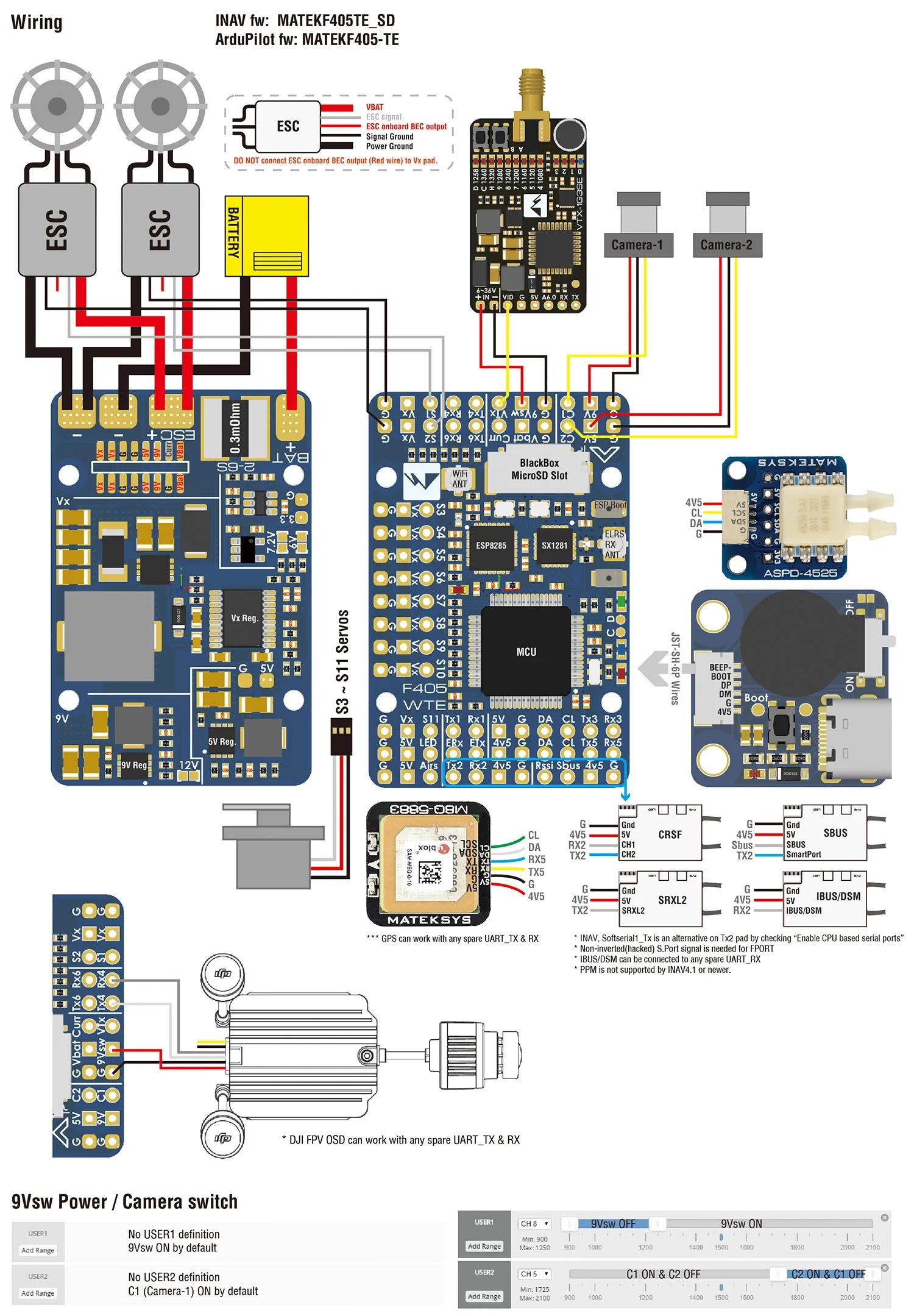
1x blocos de alimentação ESC
-
Divisor de tensão da bateria 1K:20K (escala 2100 no INAV, BATT_VOLT_MULT 21,0 no ArduPilot)
-
Sensor de corrente: 220A, 3,3 V ADC (escala 150 no INAV, 66,7 A/V no ArduPilot)
-
Resistor de detecção: 90A contínuo, pico de 220A
Saída BEC 5V
-
Projetado para controlador de vôo, receptor, OSD, câmera, campainha, 2812 LED_Strip, campainha, módulo GPS, AirSpeed
-
Corrente contínua: 2 Amperes, Máx.3A
Saída BEC 9V/12V
-
Projetado para transmissor de vídeo, câmera, gimbal etc.
-
Corrente contínua: 2 Amperes, Máx.3A
-
Opção de 12V com jumper pad
-
para saída estável de 9V/12V, a tensão de entrada deve > tensão de saída +1V
Saída BEC Vx
-
Projetado para Servos
-
Tensão ajustável, 5V padrão, 6V ou 7,2V via jumper
-
Corrente contínua: 8 Amperes, máx. 10A
-
para saída Vx estável, a tensão de entrada deve > Tensão Vx +1V
Saída BEC 3,3 V
-
Projetado para módulo Baro / Compass e 3.Periféricos 3V
-
Regulador Linear
-
Corrente contínua: 200mA
Físico
-
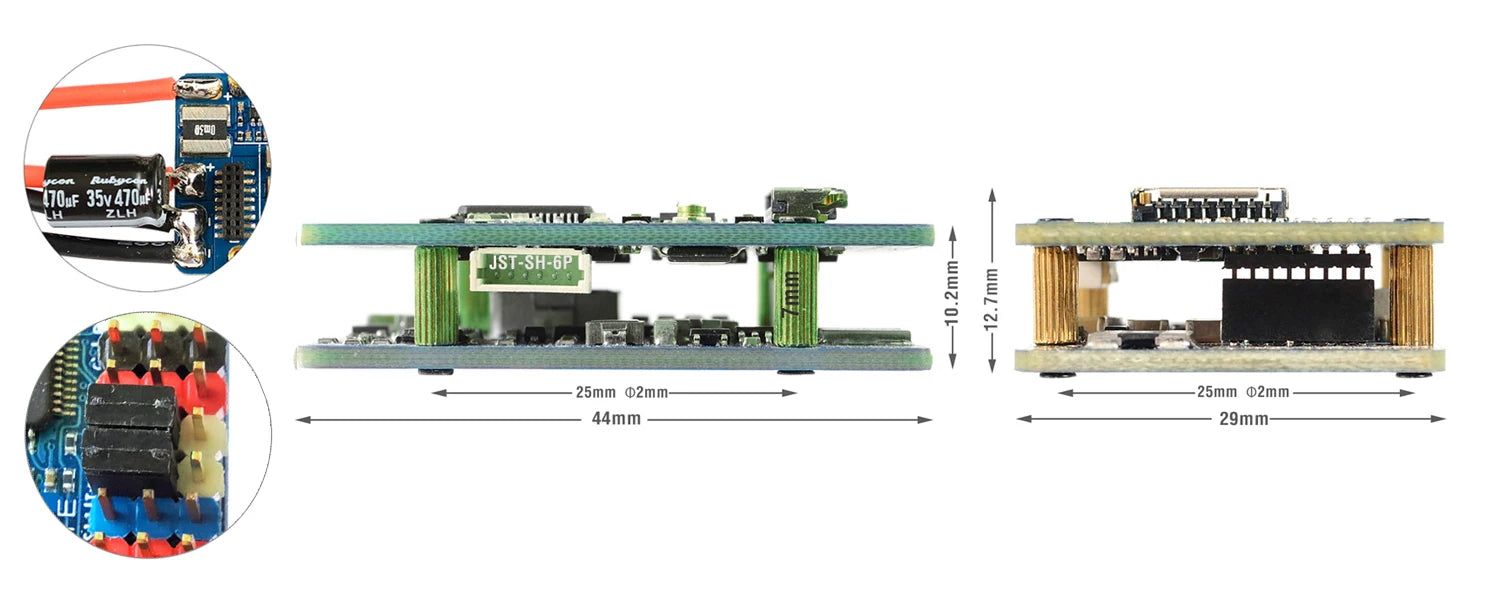
Montagem: 25 x 25mm, Φ2mm
-
Dimensões: 44 x 29 x 12,7 mm
-
Peso: 22g com adaptador USB/campainha
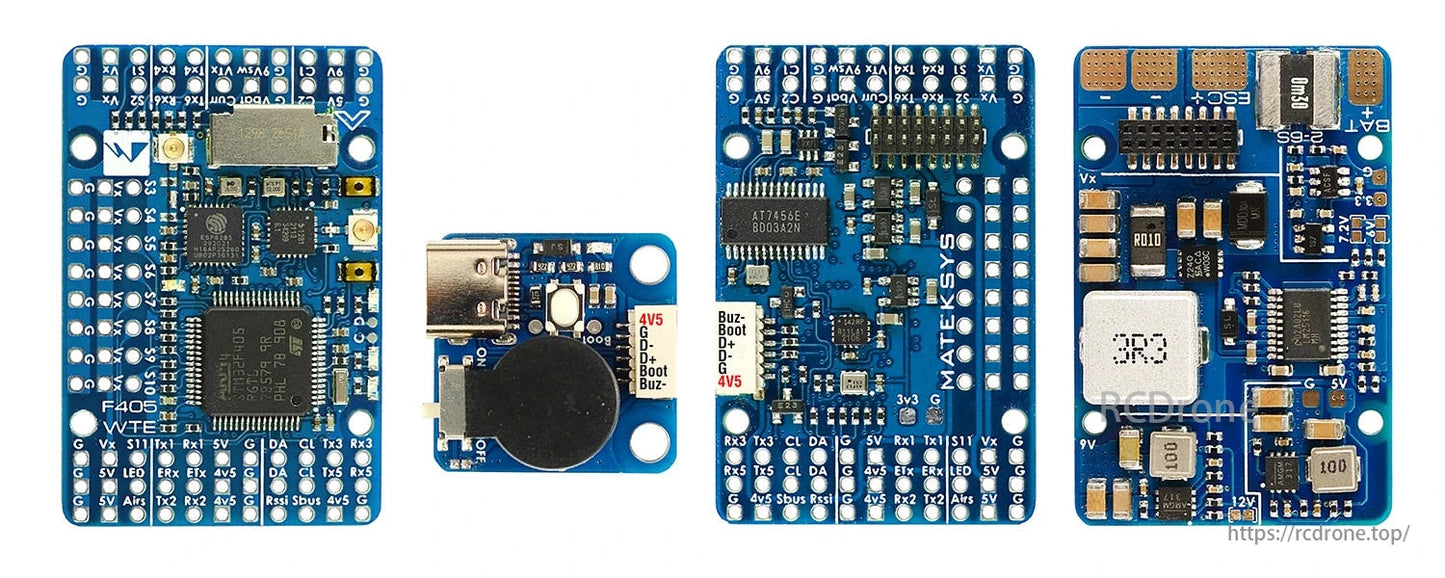
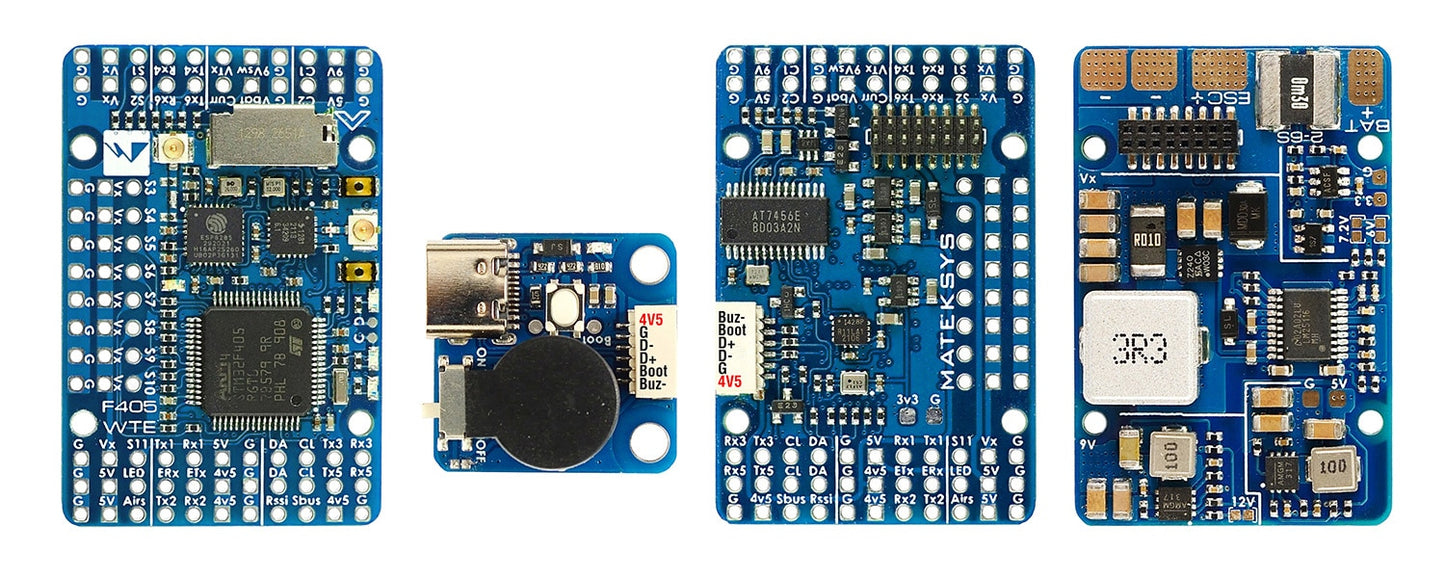
Incluindo
-
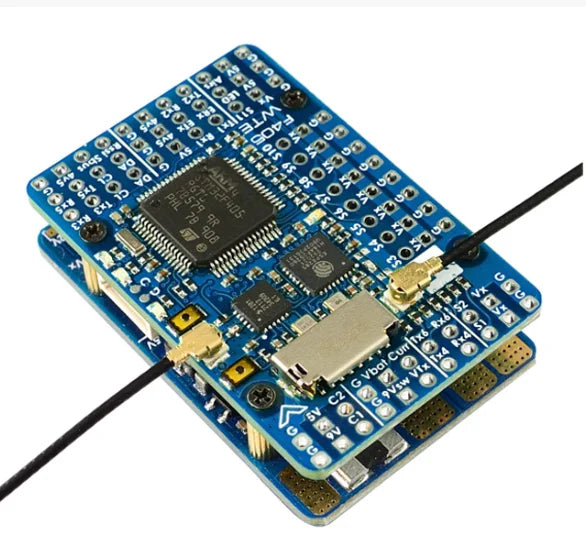
1x F405-WTE
-
1x extensor USB (Tipo C)/Beep (campainha passiva) + cabo JST-SH-6P para JST-SH-6P de 20 cm para extensor USB.
-
2x antenas IPEX-MHF1 2.4G
-
1x capacitor Rubycon ZLH 35V 470uF
-
Dupont 2,54 pinos (A placa é enviada sem solda)
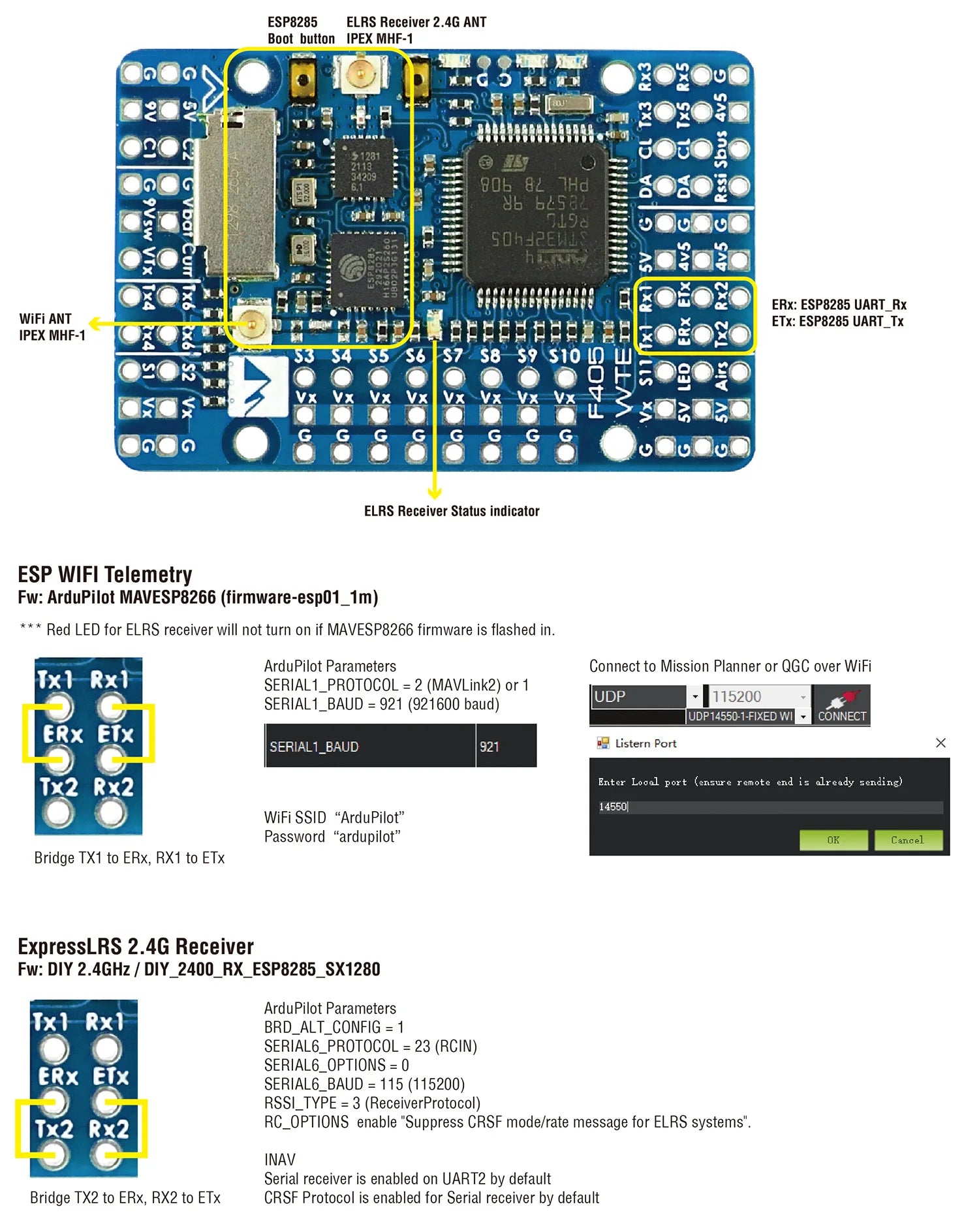
Telemetria wi-fi ArduPilot ESP8266
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
Ferramenta: ESP_NodeMCU-PyFlasher.exe
-
Firmware: firmware-esp01_1m.bin
-
Flash com ESP_NodeMCU-PyFlasher
-
Conecte o ESP8285 (ETx, ERx) ao adaptador USB-TTL, com ETx no F405-WTE conectado ao Rx no USB-TTL e ERx conectado ao Tx do USB-TTL. Conecte 4v5 e GND do F405-WTE a 5V e GND do USB-TTL
-
Conecte o adaptador USB-TTL ao PC enquanto pressiona e segura o botão de inicialização do ESP8285.
-
abrir ESP_NodeMCU-PyFlasher
-
selecione porta serial do módulo USB-TTL, carregue o firmware, selecione “Saída Dupla (DOUT)” e “Sim.limpa todos os dados“
-
clique em “Flash NodeMCU“
-
depois de piscar, desligue e ligue o F405-WTE por USB ou bateria.
-
Aguarde alguns segundos, pesquise o SSID do WiFi “ArduPilot” e a senha é “ardupilot”
-
Dicas: O LED vermelho do receptor ELRS não acenderá se o firmware MAVESP8266 for atualizado.
-
Receptor ExpressLRS 2.4G
-
ExpressLRS AUX1-AUX8 não são canais de resolução total. https://www.expresslrs.org/2.0/software/switch-config/
-
Piscando via WiFi
-
Ligue o F405-WTE por USB, o LED (vermelho) do receptor piscará lentamente no início e, após 30s, deverá piscar rapidamente indicando que está no modo WiFi Hotspot.
-
Etapas mais detalhadas, consulte esta página.
-
Alvo: DIY 2,4 GHz / DIY_2400_RX_ESP8285_SX1280
-
-
Piscando via UART
-
Conecte o ESP8285 (ETx, ERx) ao adaptador USB-TTL, com ETx no F405-WTE conectado ao Rx no USB-TTL e ERx conectado ao Tx do USB-TTL. Conecte 4v5 e GND do F405-WTE a 5V e GND do USB-TTL.
-
Conecte o adaptador USB-TTL ao PC enquanto pressiona e segura o botão de inicialização do ESP8285.
-
Selecione o alvo Faça você mesmo 2.4GHz / DIY_2400_RX_ESP8285_SX1280 e 039>UART” para Método de Flashing, defina sua frase de vinculação e Opções de firmware e, quando terminar, clique em Build and Flash.
-
Conexão UDP com configurador INAV via WiFi
-
Ferramenta: ESP_NodeMCU-PyFlasher.exe
-
Firmware: MSPWifiBridge_ESP-01.bin compilado com base em github.com/Scavanger/MSPWifiBridge
-
Flash com ESP_NodeMCU-PyFlasher
-
Conecte o ESP8285 (ETx, ERx) ao adaptador USB-TTL, com ETx no F405-WTE conectado ao Rx no USB-TTL e ERx conectado ao Tx do USB-TTL. Conecte 4v5 e GND do F405-WTE a 5V e GND do USB-TTL
-
Conecte o adaptador USB-TTL ao PC enquanto pressiona e segura o botão de inicialização do ESP8285.
-
abra ESP_NodeMCU-PyFlasher
-
selecione porta serial do módulo USB-TTL, carregue o firmware, selecione “Saída Dupla (DOUT)” e “Sim.limpa todos os dados“
-
clique em “Flash NodeMCU“
-
depois de piscar, desligue e ligue o F405-WTE por USB ou bateria.
-
Aguarde alguns segundos, pesquise o SSID do WiFi “MSPWifiBridge” e a senha é “123456789”
-
Se não houver encaminhamento automático para a página de configuração, acesse http://192.168.4.1 manualmente. Dados de login padrão: nome de usuário: admin, senha: 123456789
-
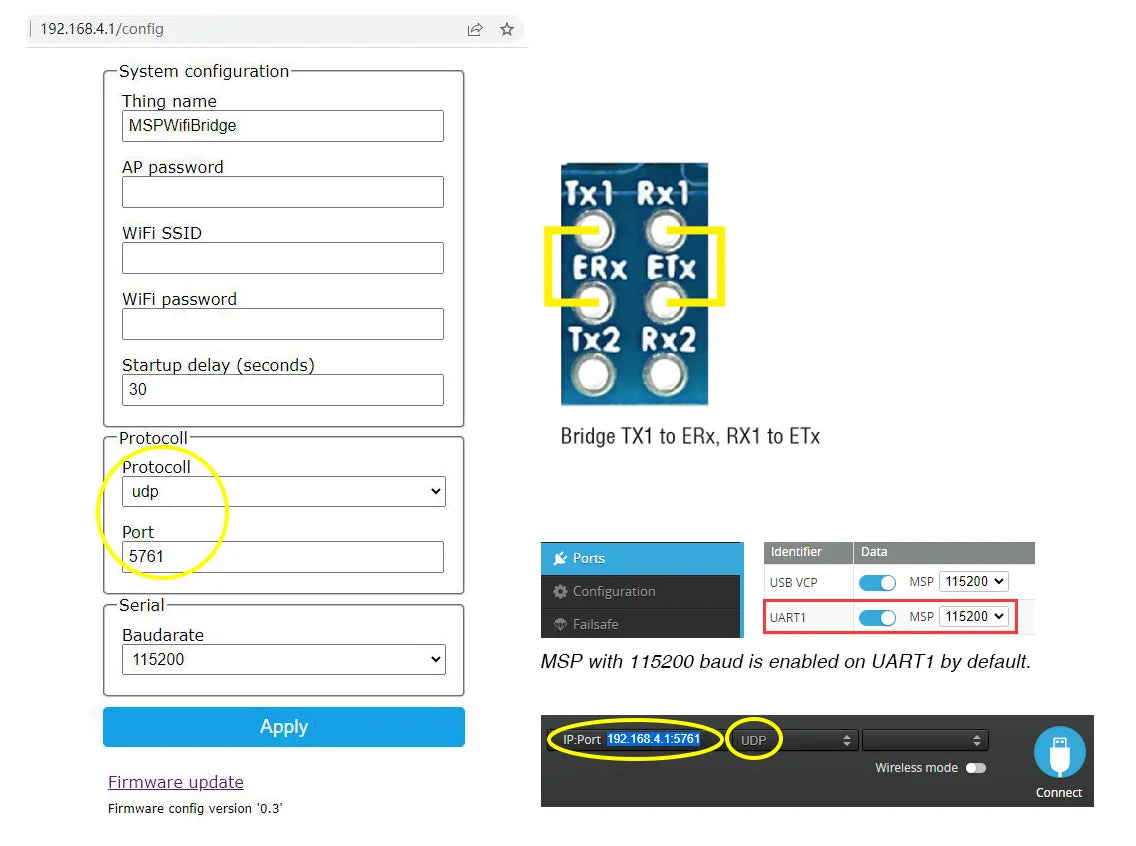
192.168.4.1/config Configuração do sistema Thing_name MSPWifiBridge Senha do AP Ixl Rx| WiFi SSID ERx ETx Senha WiFi Tx2 Rx2 Staz delay (segundos 30 Protocoll Bridge TX1 para erx, RXI para ETx Protocoll udp Porta 5761 Ponts Identificador de dados USB VC?
Related Collections