Controlador de vôo Matek System H743 / MINI H743 - STM32H743VIT6 ICM20602 OSD DPS310 PDB integrado para peças de drones de corrida FPV RC
Controlador de vôo Matek System H743 / MINI H743 - STM32H743VIT6 ICM20602 OSD DPS310 PDB integrado para peças de drones de corrida FPV RC
MATEKSYS
Não foi possível carregar a disponibilidade de recolha
ESPECIFICAÇÕES DO Controlador de Vôo Matek System H743 / MINI H743
Distância entre eixos: Parafusos
Atualizar peças/acessórios: Adaptador
Suprimentos de ferramentas: Classe montada
Parâmetros técnicos: Valor 2
Tamanho: CONFORME DESCRIÇÃO
Periféricos/dispositivos de controle remoto: Controle remoto
Idade recomendada: 12+a
Peças e acessórios RC: Controladores de velocidade
Quantidade: 1 peça
Origem: China Continental
Número do modelo: H743-MINI
Material: Metal
Atributos de tração nas quatro rodas: Montagem
Para tipo de veículo: Helicópteros
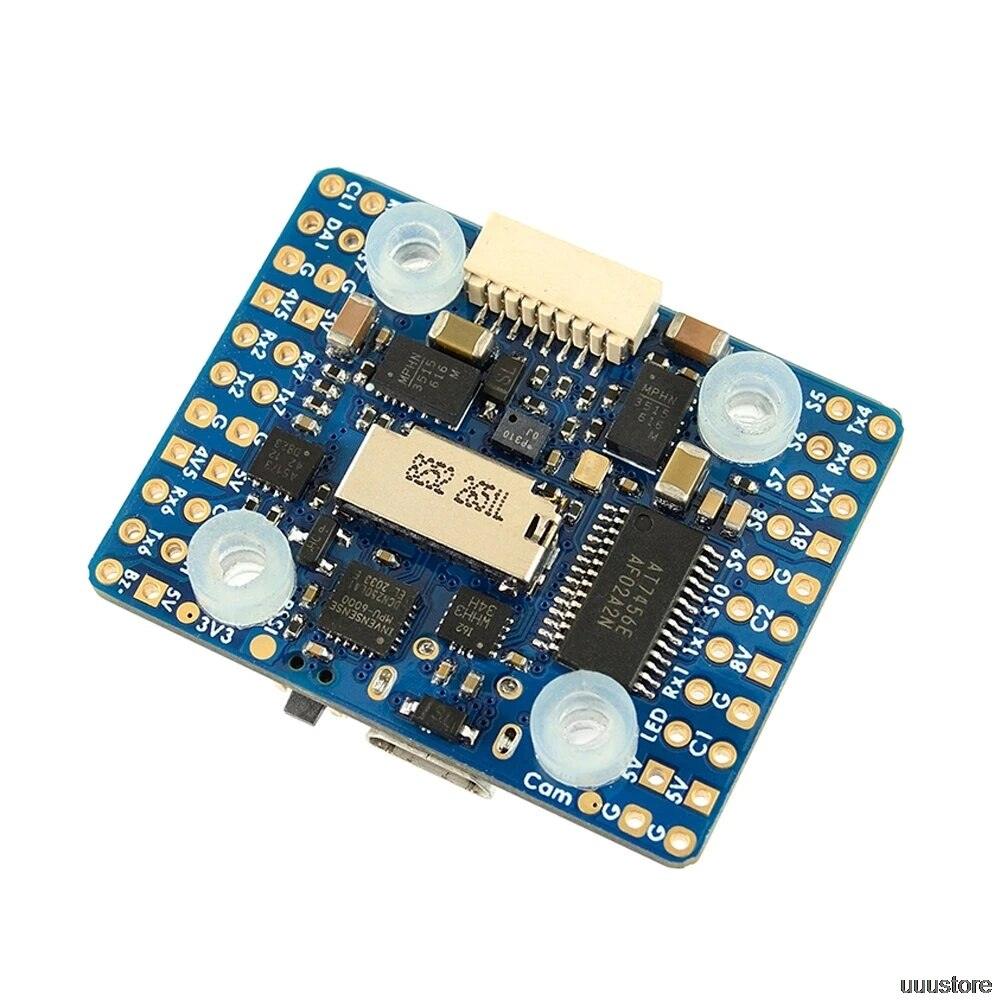
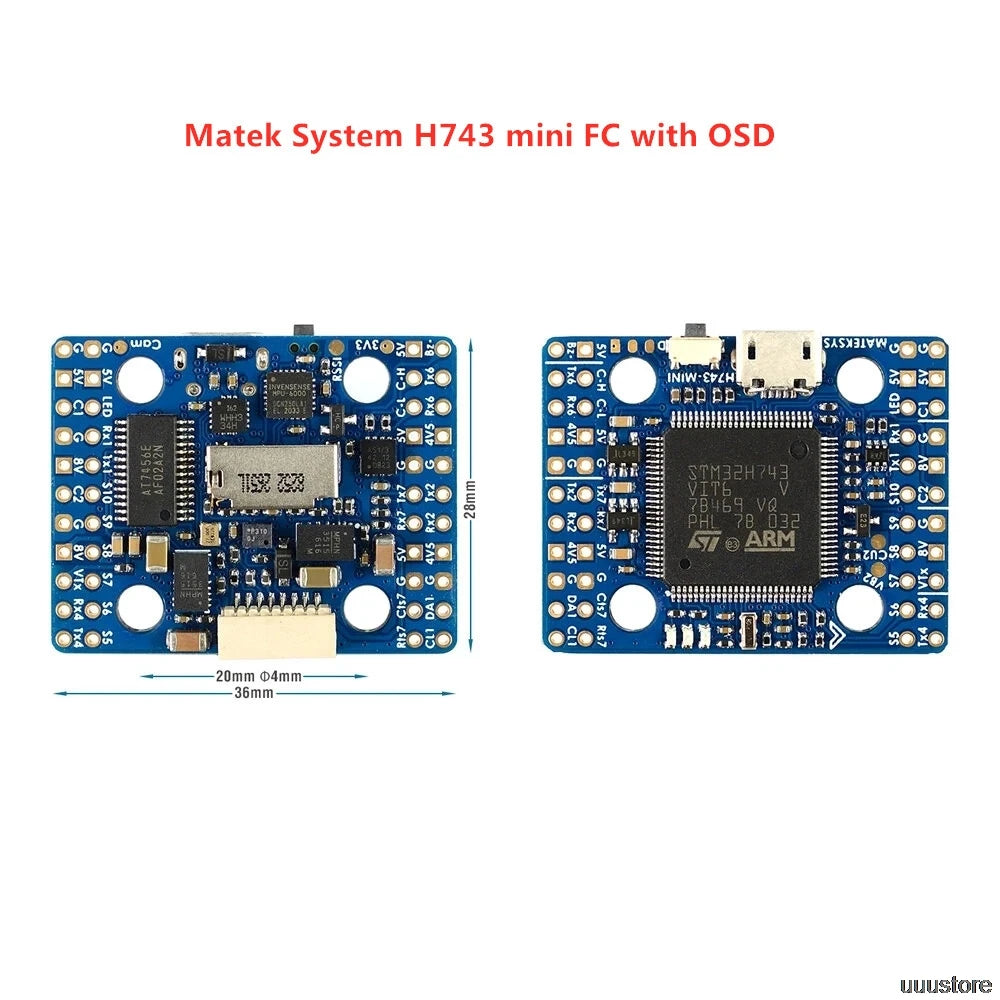
Matek System H743 MINI H743 Flight Controller STM32H743VIT6 ICM20602 OSD DPS310 PDB integrado para peças de drones de corrida FPV RC
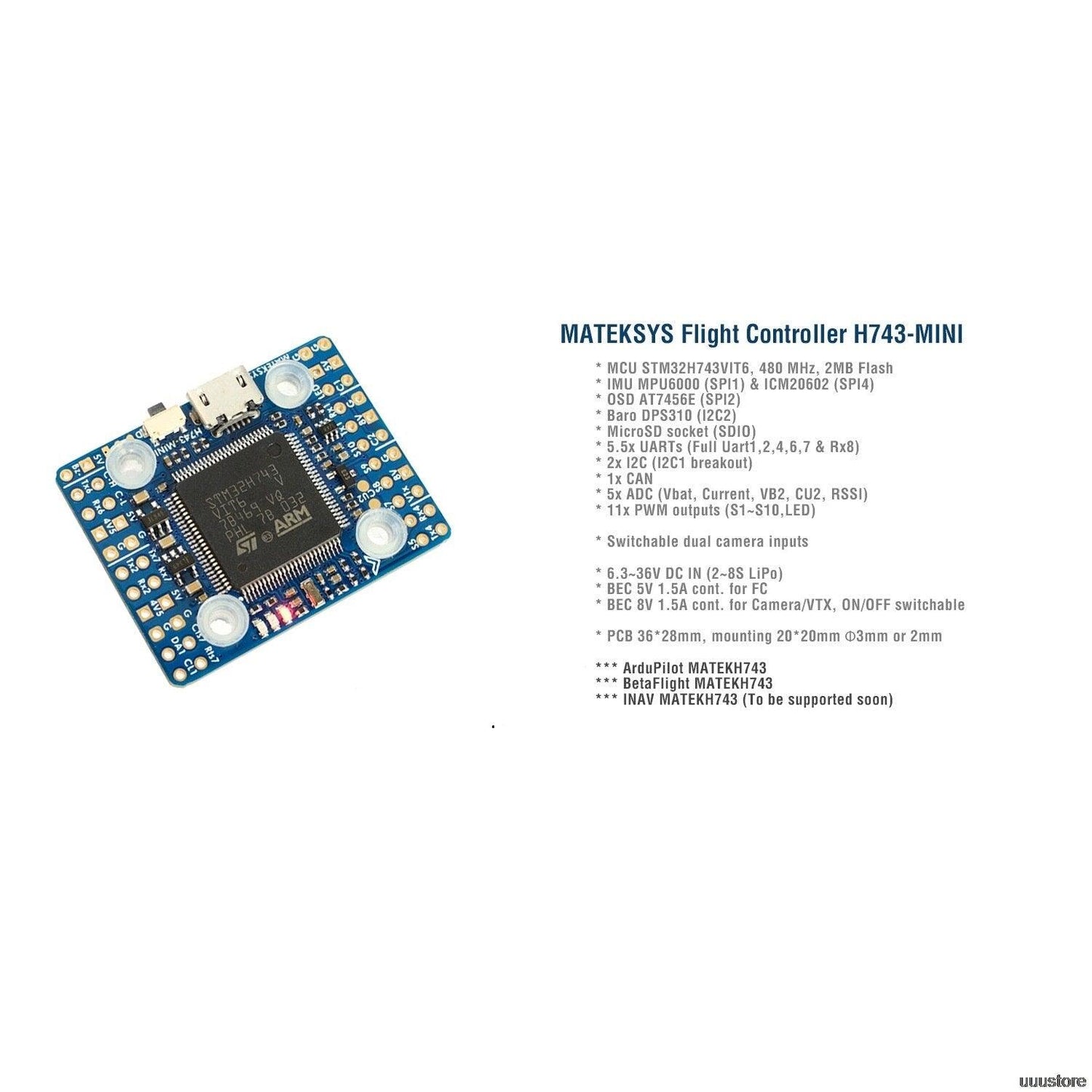
Especificações FC
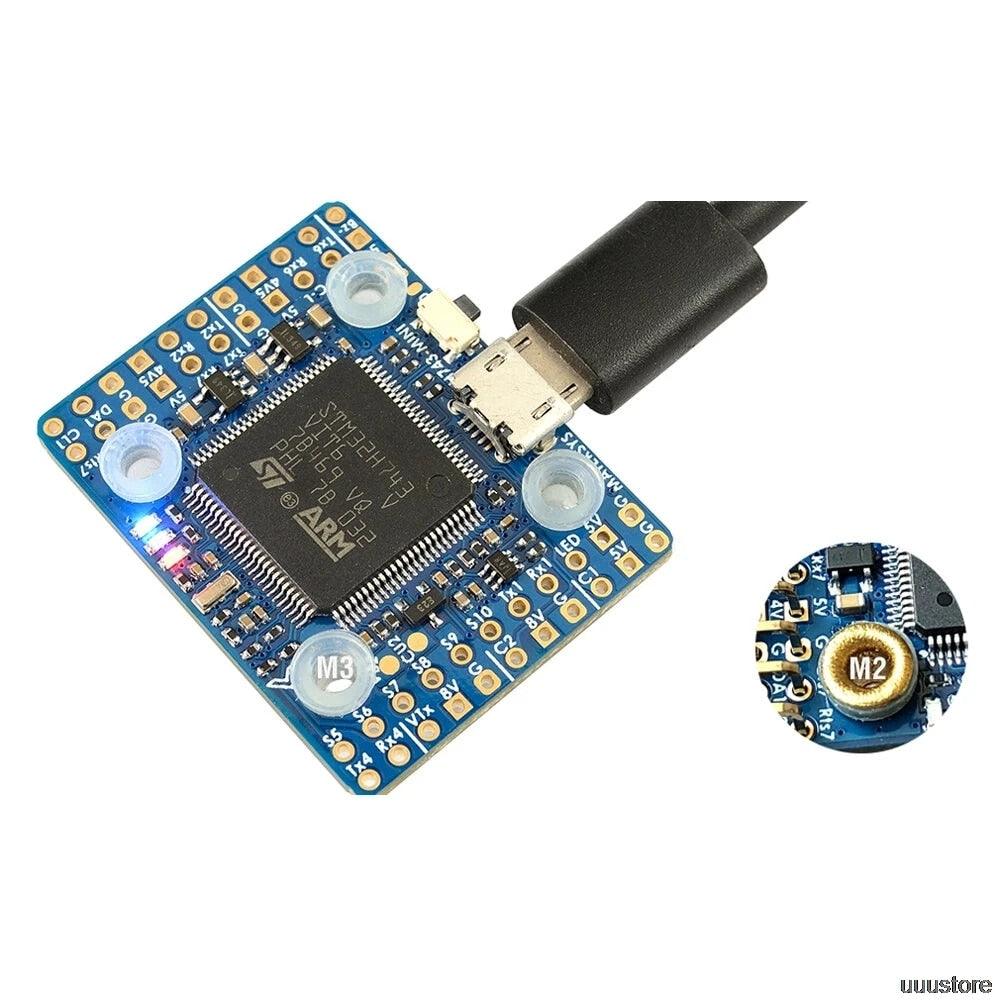
- MCU: STM32H743VIT6, 480MHz, 1MB de RAM, 2MB de Flash
- IMU: MPU6000 (SPI1) e ICM20602 (SPI4)
- Baro: Infineon DPS310 (I2C2)
- OSD: AT7456E (SPI2)
- Blackbox: Soquete para cartão MicroSD (SDIO)
- Uarts 5,5x (1,2,4,6,7, Rx8)
- 11x saídas PWM (S1~S10, LED)
- 2x I2C (pads I2C1/DA1 CL1, sem interrupção I2C2)
- 1x CAN (pads CH, CL)
- 5x ADC (VBAT, Corrente, RSSI, VB2, CU2)
- 3x LEDs para FC STATUS (azul, vermelho) e indicador de 3,3V (vermelho)
- 1x conector JST-SH1.0_8pin (Vbat/G/Curr/Rx8/S1/S2/S3/S4)
- Interruptor de entrada de câmera dupla
- Interruptor liga/desliga de 8V
Potência
- Entrada Vbat: 6,3~36V (2~8S LiPo)
- BEC: 5V 1,5A cont. (Máx.2A)
- BEC: 8V 1,5A cont. (Máx. 2A), 8V emite estável quando Vbat>=10V, 8V emite 80% de Vbat quando Vbat< 10V
- LDO 3,3V: 200mA
- O pad VB2 suporta máx. 69V (divisor de tensão 1K:20K)
- Potência estática: 200mA@5V with Betaflight, 150mA@5V with ArduPilot
Firmware FC
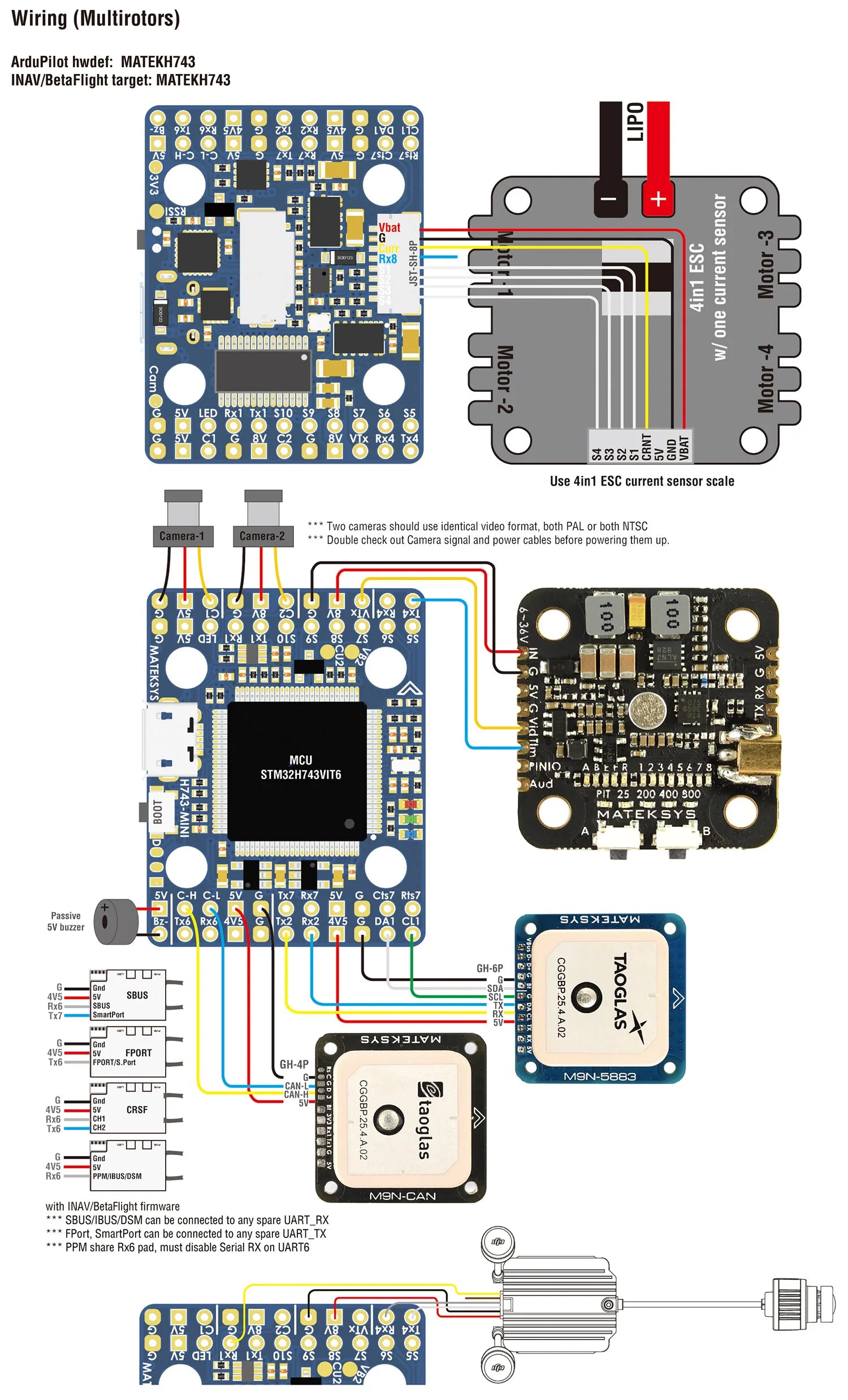
- ArduPilot(ChiBiOS): MATEKH743
- Voo Beta: MATEKH743
- INAV: MATEKH743 (com suporte em breve)
Físico
- Montagem
- 20 x 20mm/Φ3mm com ilhós de silicone
- 20 x 20mm/Φ2mm com ilhós de silicone e latão
- Dimensões: 36 x 28 x 6,5 mm
- Peso: 7g
Incluindo
- 1x H743-MINI
- 6x ilhós de silicone M4 a M3
- 6x ilhós de latão M3 a M2
- 1x cabo JST-SH1.0_8 pinos, 5cm
- 2 conectores JST-SH1.0_8pin
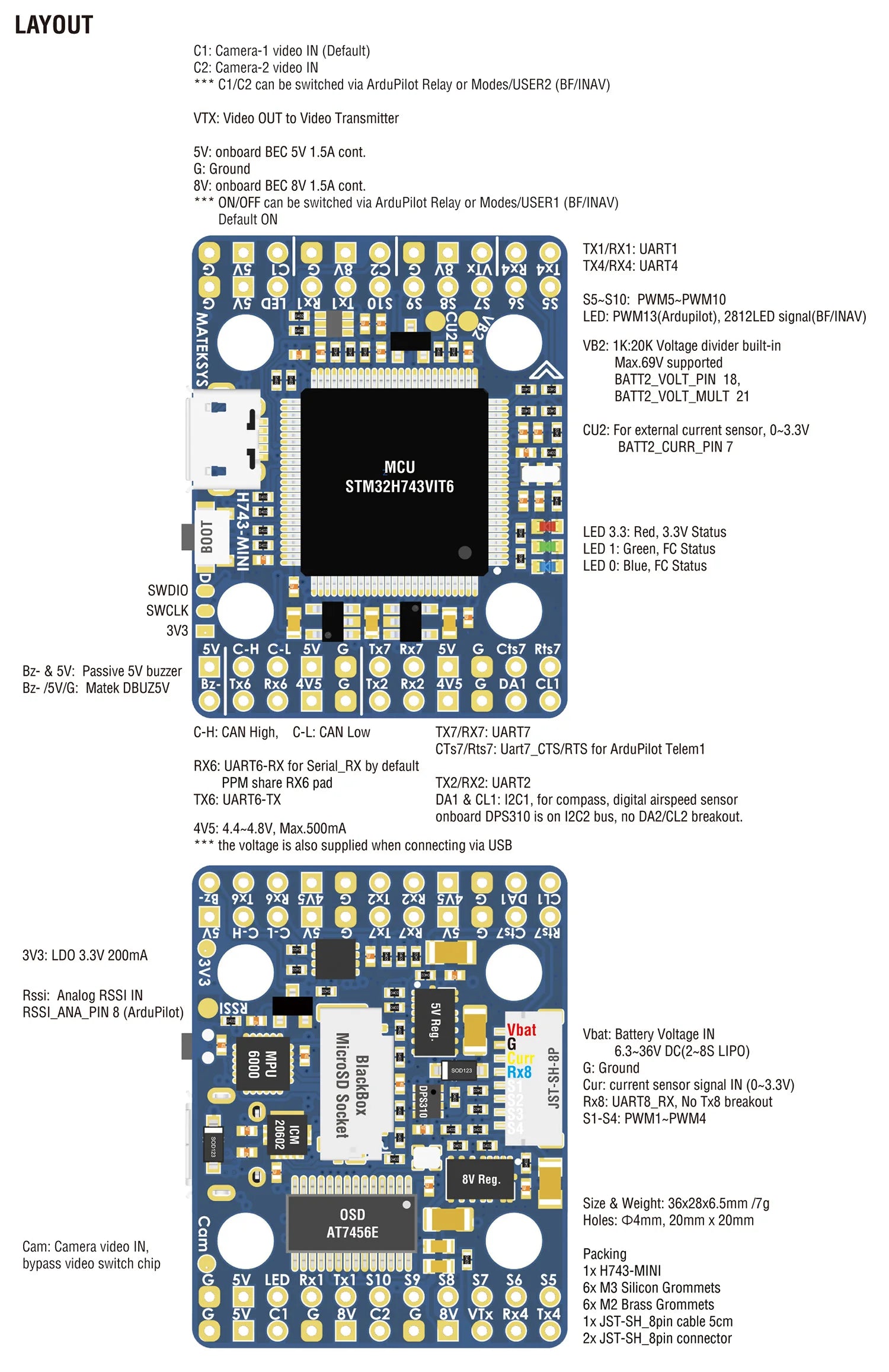
O modo C1 pode ser alternado usando o recurso Relay do ArduPilot ou Modos/USER2 (BFiINAV). Por padrão, este modo é habilitado em TXI/RXI via UART1 a uma taxa de transmissão de 8X. Além disso, quando no modo VX, o canal TXA/Rx4 do transmissor se comunica com o controlador de vôo via UART4 a uma velocidade de 31,25 kHz.
-

Related Collections