


Controlador de Voo MATEKSYS H7A3-SLIM - ICM42688P - 30x30
Controlador de Voo MATEKSYS H7A3-SLIM - ICM42688P - 30x30
MATEKSYS
Não foi possível carregar a disponibilidade de recolha
Características
- Exibição na Tela
- Montagem 30x30
- Design Compacto
- Conectividade
- Leve
Especificações
Especificações
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Baro: SPL06-001
- OSD: AT7456E
- Blackbox: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) com inversão integrada.
- 11x saídas PWM
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Corrente, VB2, Cur2)
- 3x LEDs para STATUS do FC (Azul, Vermelho) e indicador de 3.3V (Vermelho)
- USB Tipo-C (USB2.0)
- 8 saídas PWM em 2 conectores JST-SH1.0_8pin para 2 ESC 4 em 1
- 1 conector JST-GH1.25_4pin (5V/CAN-H/CAN-L/G)
- Saída de 9V com interruptor ON/OFF
- Vídeo digital OSD é suportado por qualquer UART disponível
Energia
- Entrada Vbat: 6~36V (2~8S LiPo)
- BEC: 5V 2A cont. (Máx. 3A)
- BEC: 9V 2A cont. (Máx. 3A)
- LDO 3.3V: Máx. 200mA
- Sem sensor de corrente embutido
- O pad ADC VB2 suporta Máx. 69V (divisor de tensão: 1K:20K)
Firmware FC
- ArduPilot: MATEKH7A3 (4.6 ou mais recente)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Flashing com STM32CubeProgrammer
Físico
- Montagem: 30.5 x 30.5mm, Φ4mm com Grommets Φ3mm
- Dimensões: 36 x 36 x 5 mm
- Peso: 7g
- Passo 3D H7A3-SLIM_step.zip
Incluindo
- 1x H7A3-SLIM
- 6x Grommets de silicone M4 para M3
- 2x JST-SH1.0_8pin cabo, 5cm, & conectores de 8 pinos
- 1x cabo JST-GH-4P para JST-GH-4P para porta CAN, 20cm
Detalhes

O controlador de voo MATEKSYS H7A3-SLIM utiliza um MCU STM32H7A3 com IMU ICM42688P e uma porta USB-C num padrão de montagem de 30,5mm.

O controlador de voo MATEKSYS H7A3-SLIM utiliza um layout compacto de 30x30 com uma porta USB-C e pads claramente rotulados para uma fiação organizada.

O MATEKSYS H7A3-SLIM utiliza conectores JST-SH 1.0 de 8 pinos duplos, além de uma porta JST-GH de 4 pinos e USB Tipo-C para uma fiação organizada e fácil configuração.

O MATEKSYS H7A3-SLIM utiliza pads de solda e portas claramente rotuladas para vídeo de câmera/VTx, UARTs, CAN e conexões de energia.
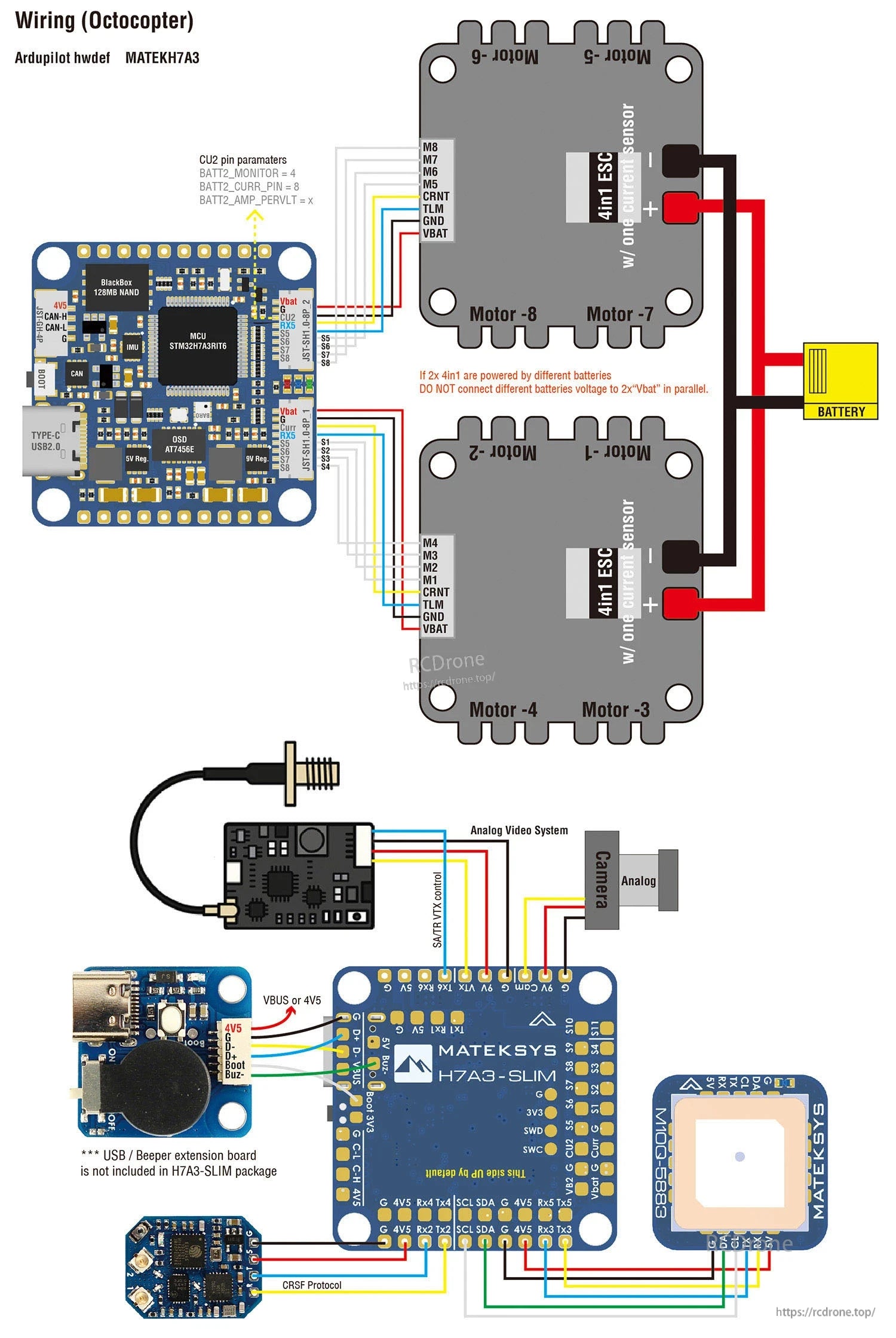
MATEKSYS H7A3-SLIM utiliza pads claramente rotulados para conectar ESCs duplos 4-em-1, alimentação VBAT, GPS, receptor e componentes de vídeo analógico.

mapeamento ArduPilot
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | I/O tolerante a 5 V | TIM1_CH2 | DMA/Bi-DShot | Grupo1 |
| S2 | PWM2 GPIO51 | I/O tolerante a 5 V | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | I/O tolerante a 5 V | TIM2_CH1 | DMA/Bi-DShot | Grupo2 | |
| S4 | PWM4 GPIO53 | I/O tolerante a 5 V | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | I/O tolerante a 5 V | TIM3_CH3 | DMA/Bi-DShot | Grupo3 | |
| S6 | PWM6 GPIO55 | I/O tolerante a 5 V | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | I/O tolerante a 5 V | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | I/O tolerante a 5 V | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | I/O tolerante a 5 V | TIM4_CH1 | DMA/DShot | Grupo4 | |
| S10 | PWM10 GPIO59 | I/O tolerante a 5 V | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | I/O tolerante a 5 V | TIM16_CH1 | DMA/DShot | Grupo5 | |
| PWM1~PWM11 são compatíveis com Dshot e PWM.No entanto, a mistura de Dshot e operação PWM normal para saídas é restrita a grupos, ou seja, ativar Dshot para uma saída em um grupo requer que TODAS as saídas nesse grupo sejam configuradas e utilizadas como Dshot, em vez de saídas PWM. Se servo e motor forem misturados no mesmo grupo, certifique-se de que este grupo opere na menor frequência PWM de acordo com a especificação do servo. Isto é, se o servo suportar um máximo de 50Hz, o ESC deve operar a 50Hz neste grupo. |
||||||
| PINIO | Interruptor de 9V | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Pino Vbat | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Pino de Corrente | BATT_CURRENT_SENS | 0~3.3V | PINO_CORRENTE_BATERIA AMP_POR_VOLT |
11 X |
||
| Pad VB2 | SENS_VOLT_BATERIA2 | 0~69V | PINO_VOLT_BATERIA2 MULT_VOLT_BATERIA2 |
18 21.0 |
||
| Pad CU2 | SENS_CORRENTE_BATERIA2 | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | I/O tolerante a 5V | Baro SPL06-001 a bordo | Endereço | 0x76 |
| Velocidade do Ar Digital I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Magnetómetro | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | I/O tolerante a 5V | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
PODE GPS PODE Bússola PODE Sensor de velocidade do ar |
TIPO_GPS MASCARA_TIPO_COMPASS TIPO_ARSPD |
9 0 8 |
| UART | USB | USB | console | PROTOCOLO_SERIAL0 | 2 | |
| TX1 RX1 | USART1 c/ DMA | I/O tolerante a 5 V | Telemetria | PROTOCOLO_SERIAL1 | 2 | |
| TX2 RX2 | USART2 c/ DMA | I/O tolerante a 5 V | Entrada RC/Receptor | PROTOCOLO_SERIAL2 | 23 | |
| TX3 RX3 | USART3 c/ DMA | I/O tolerante a 5 V | GPS | PROTOCOLO_SERIAL3 | 5 | |
| TX4 RX4 | UART4 s/ DMA | I/O tolerante a 5 V | Reserva | PROTOCOLO_SERIAL4 | -1 | |
| TX5 RX5 | UART5 s/ DMA | I/O tolerante a 5 V | Reserva | PROTOCOLO_SERIAL5 | -1 | |
| TX6 RX6 | USART6 s/ DMA | I/O tolerante a 5 V | Reserva | PROTOCOLO_SERIAL6 | -1 | |
ENTRADA RC
A entrada RC está configurada no USART2 (SERIAL2).Suporta todos os protocolos RC seriais. SERIAL2_PROTOCOL=23 por padrão.
- PPM não é suportado.
- CRSF requer conexão Tx2 & Rx2, e defina SERIAL2_OPTIONS para “0” (padrão).
- SBUS/DSM/SRXL conecta ao pino Rx2, mas SBUS requer que os SERIAL2_OPTIONS sejam definidos como “3”.
- FPort requer conexão ao Tx2, e defina SERIAL2_OPTIONS para “7”. Se a Telemetria não funcionar, tente definir SERIAL7_OPTIONS = 135.
- SRXL2 requer uma conexão ao Tx2 e fornece automaticamente telemetria. Defina SERIAL2_OPTIONS para “4”.
- Qualquer UART pode ser usada para conexões do sistema RC no ArduPilot também, e é compatível com todos os protocolos, exceto PPM. Veja Sistemas de Controle Remoto para detalhes.
Relé ArduPilot (PINIO)
- Saída de 9V ATIVA por padrão
- PC13 PINIO1 SAÍDA GPIO(81) // energia de 9V switche.g.
- FUNÇÃO_RELAY1 1
- PIN_RELAY1 81 // PINIO1 GPIO
- OPÇÃO_RC7 28 // Relé Ligar/Desligar, Use CH7 do Transmissor para definir 9V LIGADO/DESLIGADO
A funcionalidade configurada será ativada quando o valor pwm do interruptor auxiliar se tornar superior a 1800. Será desativada quando o valor cair abaixo de 1200.
Verifique o valor pwm enviado pelo transmissor quando o interruptor estiver alto e baixo usando a tela de Configuração Inicial do Mission Planner >> Hardware Obrigatório >> Calibração de Rádio. Se não subir acima de 1800 ou descer abaixo de 1200, é melhor ajustar os pontos finais do servo no transmissor.
Related Collections


