Módulo GPS MATEKSYS M9N-5883 GNSS & Bússola, u-blox NEO-M9N + QMC5883L, JST-GH-6P
Módulo GPS MATEKSYS M9N-5883 GNSS & Bússola, u-blox NEO-M9N + QMC5883L, JST-GH-6P
MATEKSYS
Preço normal
$64.99 USD
Preço normal
Preço de saldo
$64.99 USD
Preço unitário
por
Impostos incluídos.
Envio calculado na finalização da compra.
Não foi possível carregar a disponibilidade de recolha
Visão Geral
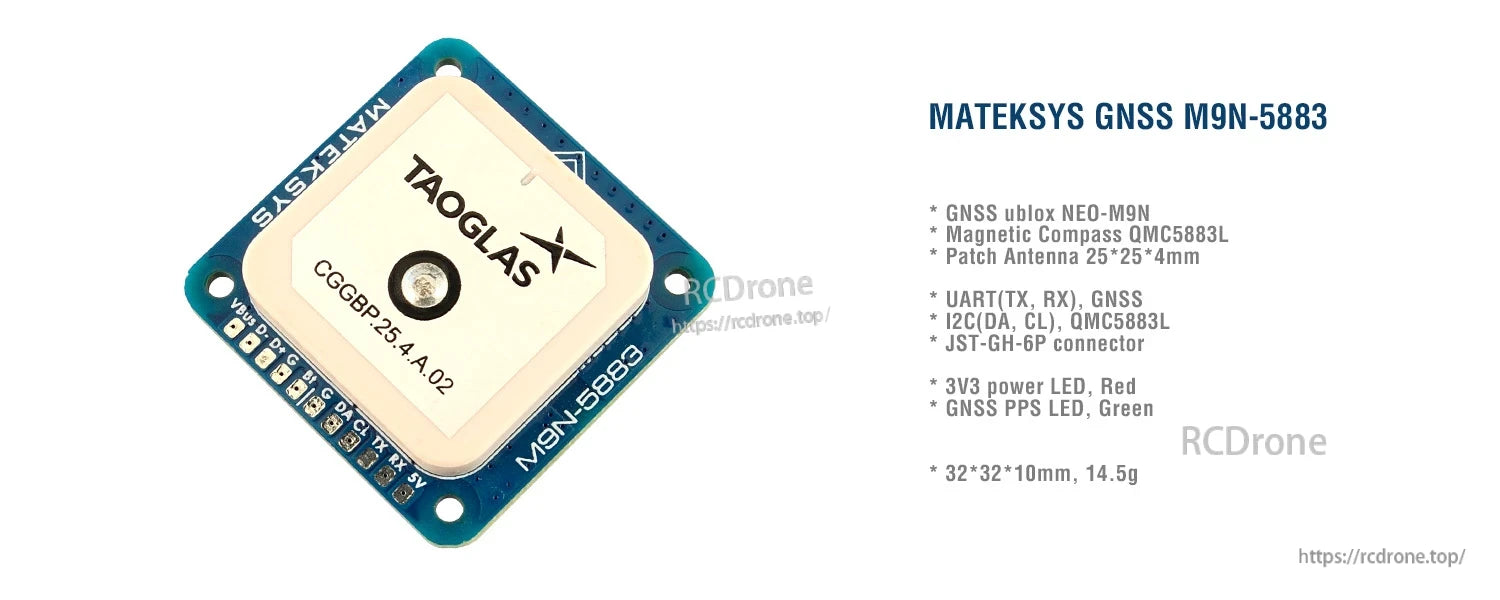
O módulo de GPS GNSS MATEKSYS M9N-5883 & é um receptor GNSS de múltiplas constelações baseado no u-blox NEO-M9N, combinado com uma bússola magnética QMC5883L. Com uma arquitetura de front-end RF de múltiplas bandas, pode receber GPS, Galileo, GLONASS e BeiDou simultaneamente.
Principais Características
- GNSS: receptor concorrente u-blox NEO-M9N (GPS, GLONASS, Galileo, BeiDou)
- Bússola magnética: QMC5883L
- Interfaces: UART (TX, RX) para GNSS; I2C (DA, CL) para bússola
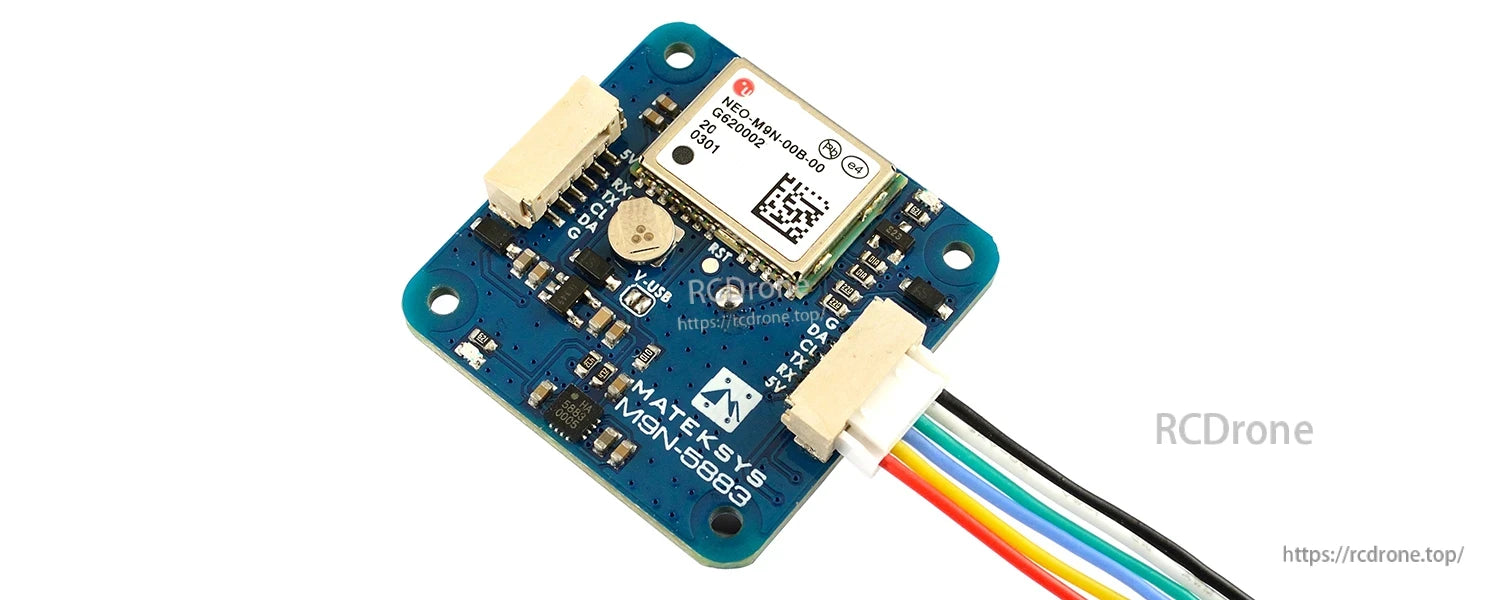
- Conector JST-GH-6P
- LEDs de status: LED de alimentação 3.3V (Vermelho); LED GNSS PPS (Verde), piscando (1Hz) quando o GNSS tem fixação 3D
- Reinício do receptor: ligar o pad “RST” ao Terra por pelo menos 100 ms ativa um arranque a frio (opção de recuperação)
Serviço ao cliente: [email protected] (ou https://rcdrone.top/).
Especificações
| Receptor GNSS | u-blox NEO-M9N |
| Constelações suportadas | GPS, GLONASS, Galileo, BeiDou |
| Bússola magnética | QMC5883L |
| Antena patch | 25*25*4mm |
| Intervalo de tensão de entrada | 4~5.5V (pino/pad 5V) |
| Consumo de energia | 50mA |
| Taxa de baud UART | 38400 por defeito |
| Temperaturas de operação | -20~80 °C |
| Interface GNSS | UART (TX, RX) |
| Interface de bússola | I2C (DA, CL) |
| Conector | JST-GH-6P |
| Indicadores LED | LED de alimentação 3.3V (Vermelho); LED GNSS PPS (Verde), piscando (1Hz) quando o GNSS tem fixação 3D |
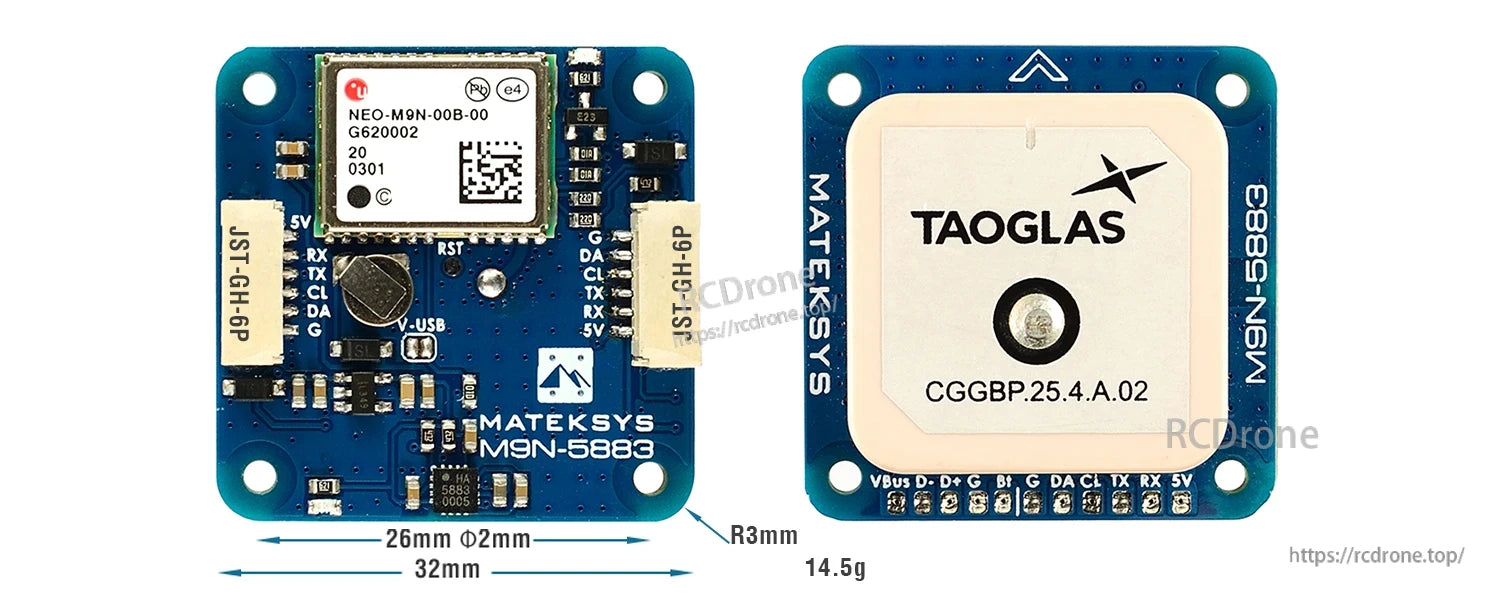
| Dimensões | 32mm*32mm*10mm |
| Peso | 14.5g |
| Detalhes de montagem (como mostrado) | 26mm; diâmetro do furo: Φ2mm; R3mm |
O que está incluído
- 1x M9N-5883
- 1x fio de silicone JST-GH-6P para JST-GH-6P de 20cm
Fiação e Configurações
- M9N-5883 5V para controlador de voo 4~5.5V
- M9N-5883 RX para controlador de voo UART_TX
- M9N-5883 TX para controlador de voo UART_RX
- M9N-5883 CL para controlador de voo I2C_SCL
- M9N-5883 DA para controlador de voo I2C_SDA
- M9N-5883 G para controlador de voo GND
Dicas e Notas
-
Alinhamento da bússola (montagem plana): Inclinar o magnetômetro é fortemente desencorajado!
- INAV/Betaflight: seta da bússola para frente, definir CW 270° Flip quando a seta do controlador de voo estiver voltada para frente.
- INAV/Betaflight: a seta da bússola para trás, defina a rotação CW 90° quando a seta do controlador de voo estiver voltada para a frente.
- ArduPilot/Mission Planner: Rotação Nenhuma.
- Mantenha a bússola/magnetómetro a 10 cm de distância de linhas de energia/ESC/motores/material à base de ferro.
- INAV 5.0.0, Betaflight 4.3.0, ArduPilot 4.3 ou mais recente é necessário.
- As séries NEO-M9N, MAX-M10S, SAM-M10Q não têm dataflash incorporado; uma vez que o GNSS é desligado e o supercapacitor se esgota, as configurações retornam ao padrão.
- O protocolo UBX é bidirecional; o firmware do controlador de voo pode alterar as configurações no GPS via protocolo UBX (não é necessário definir os parâmetros do módulo GNSS no u-center).
- Do GNSS FW3.01: o pulso de tempo está alinhado com o tempo UTC; o tempo é válido apenas após o segundo bissexto ser descarregado (pode levar até 12,5 min). O LED PPS pode não piscar imediatamente após a correção 3D.
- Reiniciar: ligar o pad “RST” ao GND durante pelo menos 100 ms ativa um arranque a frio. O RESET apaga toda a informação e ativa um arranque a frio; use apenas como uma opção de recuperação se a fiação/configuração estiver correta, mas o controlador não conseguir detetar o módulo GNSS.
- Riscos na antena cerâmica são o resultado da afinação da antena.
Manuais
- M9N-5883_step.zip
- Resolver problemas relacionados com GPS: https://www.mateksys.com/?p=5712#tab-id-6
- u-center Windows
Detalhes
O MATEKSYS GNSS M9N-5883 combina um receptor u-blox NEO-M9N e uma bússola QMC5883L com conexões UART e I2C através de um porto JST-GH de 6 pinos.
O módulo GNSS e bússola MATEKSYS M9N-5883 utiliza um layout de placa compacto com conectores JST para uma fiação de GPS e I2C simples.
Related Collections