


Controlador de Voo Brushless BetaFPV Matrix 1S (5EM1) STM32G473, ELRS 2.4GHz, VTX 5.8GHz 400mW
Controlador de Voo Brushless BetaFPV Matrix 1S (5EM1) STM32G473, ELRS 2.4GHz, VTX 5.8GHz 400mW
BETAFPV
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O BetaFPV Matrix 1S Controlador de Voo Brushless (5IN1) é um controlador de voo altamente integrado, projetado para iniciantes e entusiastas de FPV, combinando FC + VTX + OSD + ESC + RX em uma placa robusta de 1,0 mm de espessura. Possui conectores de motor integrados para simplificar a instalação (sem necessidade de soldagem), um MCU STM32G473CEU6, RX Serial ELRS 2.4GHz a bordo e um VTX de 5.8GHz a bordo com até 400mW de potência de saída.
Principais Características
- Design altamente integrado 5IN1 (FC + VTX + OSD + ESC + RX)
- Placa de 1,0 mm de espessura para maior durabilidade
- MCU: STM32G473CEU6 (notado como um aumento de 55% na velocidade de computação em relação ao F411)
- Conector de motor integrado: JST1.25
- RX Serial ELRS 2.4GHz a bordo (V3.4.3)
- VTX de 5.8GHz a bordo: 48 canais, até 400mW; SmartAudio 2.0 controlo; modo PIT suportado
- ESC baseado no BB51 Bluejay 96K (suporta DShot300 / DShot600)
Especificações
| Controlador de Voo (FC) | |
| MCU | STM32G473CEU6 |
| Giroscópio | ICM42688P |
| Taxa máxima de amostragem do giroscópio (informação de comparação) | ICM42688P, 8KHz |
| Memória Blackbox | 16MB |
| Sensor | Voltagem & Corrente |
| BEC | 5V, Máx. 3A |
| UART | UART1, UART2 (para VTX), UART3 (para RX), UART4 |
| Betaflight OSD | AT7456E |
| ESC (integrado) | 5A contínuo |
| RX (integrado) | Serial ELRS 2.4GHz (V3.4.3) |
| VTX (integrado) | 5.8GHz 48 canais, Máx. 400mW |
| Firmware FC | Betaflight_4.5.0_BETAFPVG473 |
| Porta USB | SH1.0-4Pin |
| Conector do motor | JST1.25 |
| Conector da bateria | BT2.0 |
| Tamanho do furo de montagem | 26mm x 26mm |
| Espessura da PCB | 1.0mm |
| Peso | 3.92 +/- 0.1g (antena VTX excluída) |
| ESC | |
| Entrada de energia | 1S apenas |
| Corrente | 5A contínua, 8A de pico |
| Firmware ESC | A_X_5_96KHz_V0.19.hex para o firmware BB51 Bluejay |
| Protocolo de sinal digital | DShot300, DShot600 |
| VTX | |
| Potência de saída | 25 / 100 / 200 / 400 / PIT |
| Frequência | 5.8GHz 48 canais; Raceband: 5658~5917MHz |
| Seleção de canal | SmartAudio 2.0 |
| Tipo de modulação | FM |
| Controle de frequência | PLL |
| Todos harmônicos | Máx -50dBm |
| Estabilidade de frequência | +/-100KHz (Típ.) |
| Precisão de frequência | +/-200KHz (Típ.) |
| Erro de portadora de canal | +/-1.5dB |
| Porto da antena | 50 ohm |
| Temperatura de operação | -10°C a +80°C |
Pinout / Pads (Rótulos do Diagrama)
- Rótulos da parte frontal superior: RX ANT, CAM in, VTX ANT, BATT+(1S), GND, +5V, RX1, TX1
- Rótulos da parte frontal inferior: FC-RX-BOOT; CAM in / +5V / GND; TX4 / RX4 / +5V / GND; TX3; RX3; BZ+ / BZ-; ESC1 / ESC2 / ESC3 / ESC4; GND; +5V; USB-DM; USB-DP; USB; LED RGB
Notas de Configuração (Atenção)
- Os controladores de voo estão cobertos por defeitos de fabricação. Problemas resultantes de erros do usuário, danos físicos por colisão, danos durante a instalação ou desmontagem, modificações, picos de energia, incêndios elétricos ou exposição à água não estão cobertos.
- Potência do VTX: Uma maior potência do VTX consome mais energia e gera mais calor, reduzindo o tempo de voo. Para melhor tempo de voo em cenários internos, use 25~100mW de potência.
- Antena VTX: Conecte e instale a antena de transmissão de imagem antes de ligar o controlador de voo. Alternativamente, defina a potência de transmissão para 0 para evitar queimar.
- Por padrão, o UART2 está conectado ao VTX e o UART3 está conectado ao RX. Uma nota é fornecida para remover um resistor para liberar o UART3.
- Ao configurar o VTX analógico, os periféricos para o UART2 precisam ser configurados como VTX (TBS SmartAudio). Para o receptor, configure o UART3 como Serial RX.
RX Serial ELRS 2.4G (Vinculação & Atualizar)
- Entre no estado de vinculação ligando/desligando três vezes: conecte e desconecte o controlador de voo três vezes.
- O LED RX pisca rapidamente duas vezes indica modo de vinculação; uma luz sólida indica que está vinculado.
- O RX Serial ELRS 2.4G pode ser atualizado via Wi-Fi ou passthrough serial do Betaflight.Os passos de passthrough incluem selecionar o alvo "BETAFPV 2.4GHz AIO RX" e fazer o flash através da opção Passthrough do Betaflight no ExpressLRS Configurator.
Referências de Firmware / Configuração
- Firmware FC: Betaflight_4.5.0_BETAFPVG473 (arquivo de firmware e dump CLI): Página de download oficial
- Referência de lançamento do Betaflight (4.5.0): https://github.com/betaflight/betaflight/releases/tag/4.5.0
- Nota: A partir de 5 de janeiro de 2026, as unidades podem ser enviadas com o giroscópio BMI270; verifique a versão do giroscópio antes de fazer o flash do firmware para garantir a compatibilidade.
Notas de Firmware do ESC Bluejay
- Baseado na solução ESC BB51; firmware de referência: A_X_5_96KHz_V0.19.hex para hardware Bluejay BB51.
- Ferramentas / downloads: ESC-Configurator, BLHeliSuite16714903, lançamentos Bluejay, repositório Bluejay
- Nomes de ficheiros de firmware adicionais referenciados: A_X_5_48_v0.19.2.hex, A_X_5_96_v0.19.2.hex, A_X_70_24_v0.19.2.hex
- Aviso: Não faça flash do firmware com um intervalo mais curto; podem ocorrer paragens e danos no controlador de voo.
Aplicações
- Modelos recomendados listados para Matrix FC 5IN1: Meteor65 Pro, Meteor75 Pro
- Meteor75 Pro é indicado como sendo atualizado com o Matrix 1S Brushless FC a partir de 20 de novembro
O que está incluído
- 1 x Controlador de Voo Brushless Matrix 1S
- 1 x Adaptador Type-C para SH1.0
- 1 x Cabo Adaptador SH1.0-4Pin
- 4 x Parafusos auto-roscantes M1.2 x 4
- 4 x M1.4 x parafusos autorroscantes
- 4 x bolas de absorção de choque
Para ajuda na seleção de produtos, orientação de fiação ou suporte pós-venda, contacte [email protected] or visite https://rcdrone.top/.
Detalhes
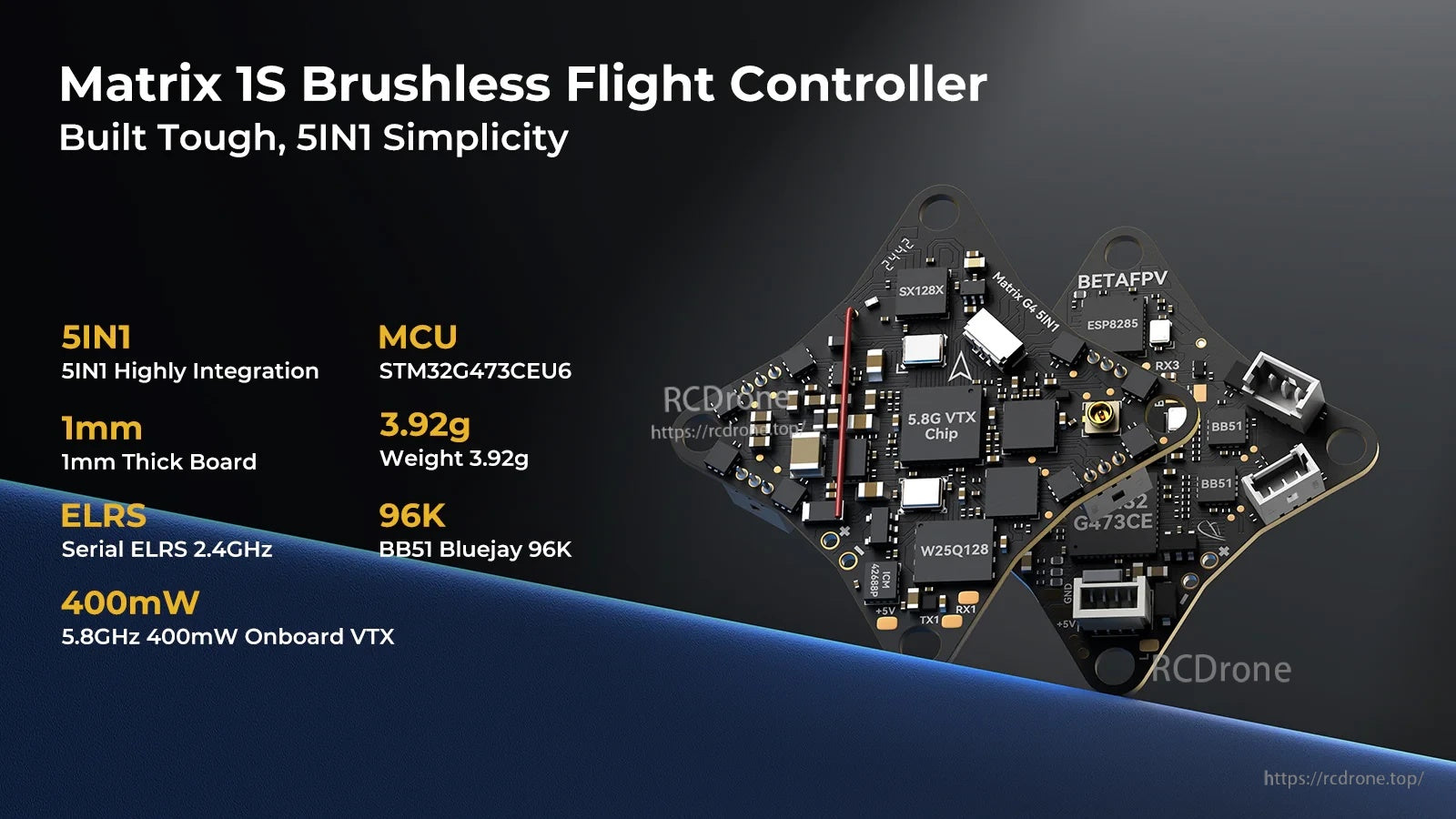
Uma placa compacta 5-em-1 1S que combina controlador de voo, ESC, VTX, OSD e receptor ELRS para manter construções ultraleves limpas e simples.
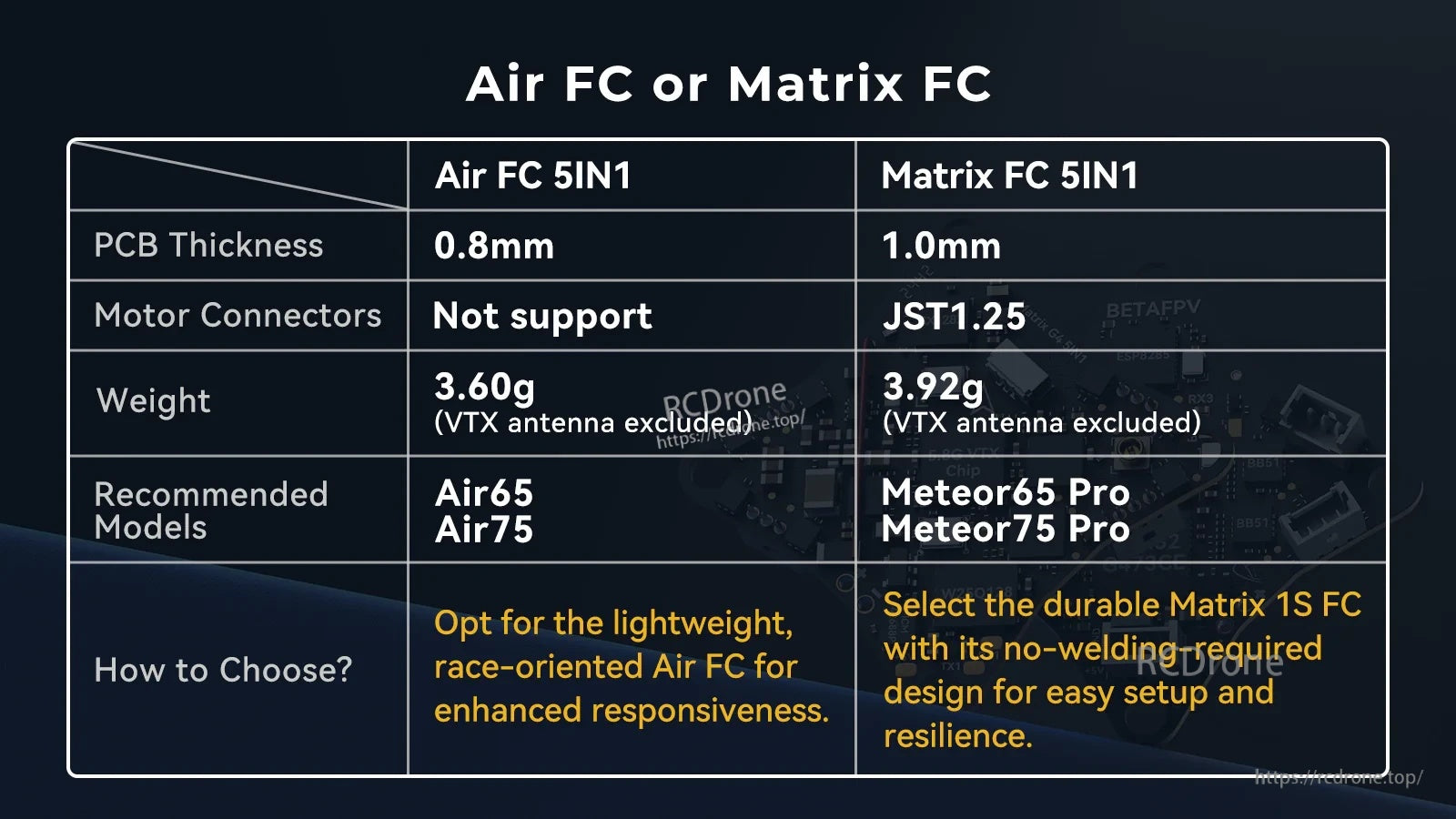
Escolha a opção Matrix quando quiser uma placa mais espessa de 1,0 mm e conectores de motor JST1.25 para instalações rápidas de motores sem solda.

Construído em torno do MCU STM32G473, com ELRS 2.4GHz Serial a bordo e um VTX de 5.8GHz classificado até 400mW para configurações FPV 1S capazes.
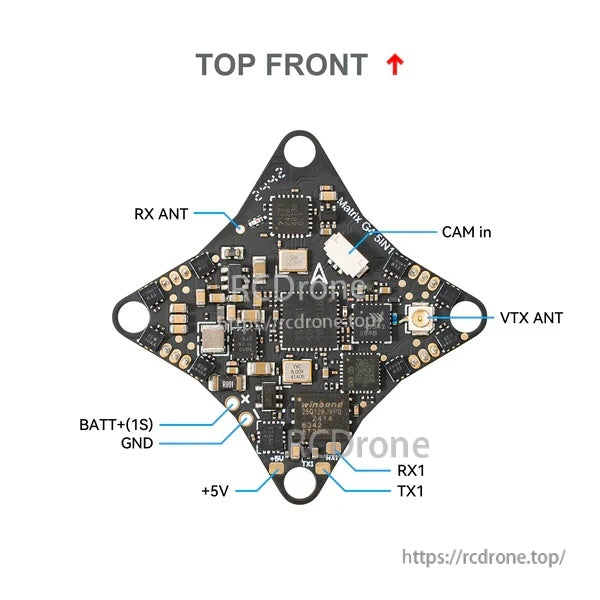
Os rótulos dos pads do lado superior tornam a fiação direta para conexões de câmera/antena VTX, entrada de energia 1S e UART1.
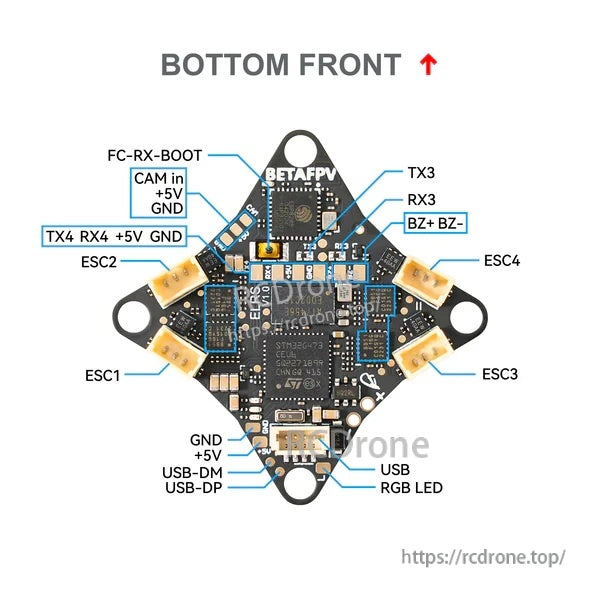
A parte inferior divide USB, UARTs, pads de buzzer e as quatro saídas ESC/motor para um roteamento limpo em estruturas apertadas.

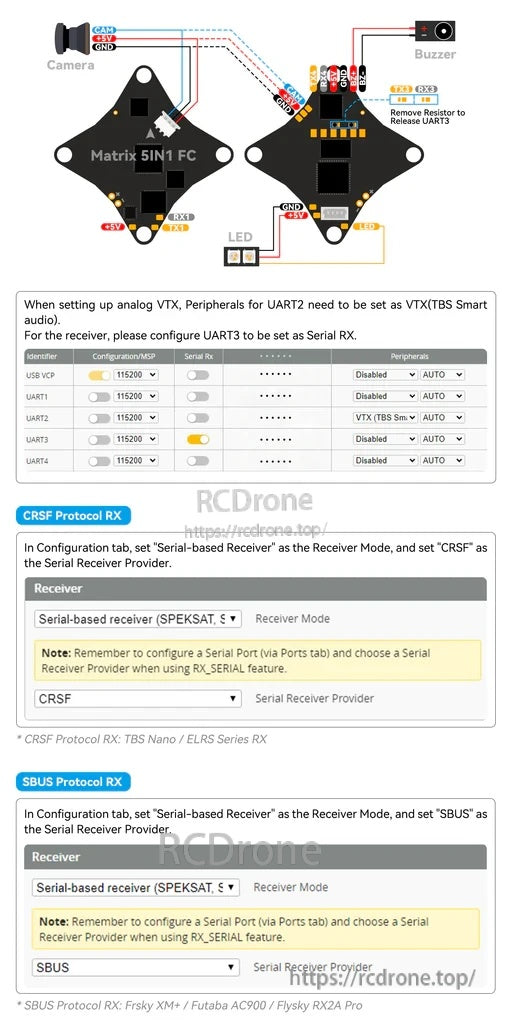
Um guia rápido de ligação e configuração do Betaflight para controlo de VTX analógico e configuração do receptor serial a bordo.

Acessórios incluídos ajudam-no a começar imediatamente, com o controlador de voo, hardware de montagem e cabos de conexão embalados em uma lata protetora.
Related Collections


