




BetaFPV Matrix 1S Controlador de Voo Brushless AIO 3EM1/4EM1, STM32G473, ELRS 2.4G, 12A/18A
BetaFPV Matrix 1S Controlador de Voo Brushless AIO 3EM1/4EM1, STM32G473, ELRS 2.4G, 12A/18A
BETAFPV
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O BetaFPV Controlador de Voo Brushless Matrix 1S é uma plataforma de controlador de voo 1S whoop oferecida em duas versões: Matrix 1S 3IN1 (FC + ESC + receptor Serial ELRS 2.4GHz a bordo; sem OSD analógico) e Matrix 1S 4IN1 (adiciona OSD Betaflight e pads de solda para um VTX analógico externo). Utiliza o MCU STM32G473CEU6 e um layout de placa em estilo cruzado, e é projetado para uma instalação simples em construções micro 1S.
Principais Características
- Duas arquiteturas: 3IN1 para construções digitais HD (com porta VTX digital HD SH1.0-6Pin e conectores de motor) e 4IN1 para construções analógicas (com OSD e pads de solda para VTX analógico externo).
- MCU: STM32G473CEU6 (168MHz); declarado como 55% mais rápido em processamento do que o F411.
- Saída ESC: 12A contínuo, 18A pico; suporta DSHOT300 e DSHOT600.
- Novo BEC: 5V/3A; design de fonte de alimentação LDO de 3.3V independente do IMU.
- Receptor Serial ELRS 2.4GHz a bordo (V3.4.3), protocolo CRSF.
- Nota de durabilidade: placa de 1mm; características de instalação orientada sem solda na versão 3IN1.
Especificações
Controlador de Voo (FC)
| MCU | STM32G473CEU6 (168MHz) |
| Giroscópio | ICM42688P |
| Taxa máxima de amostragem do giroscópio (tabela de comparação) | ICM42688P, 8KHz |
| Memória Blackbox | 16MB (também mostrado como 16M) |
| Sensor | Tensão & corrente |
| BEC | 5V/3A |
| Fonte de alimentação IMU independente | 3.3V LDO (LDO independente da IMU) |
| ESC (a bordo) | 12A contínuo |
| RX | Serial ELRS 2.4GHz (V3.4.3) |
| Porta USB | SH1.0-4Pin |
| Conector da bateria | BT2.0 |
| Conector do motor | JST1.25-3Pin (também mostrado como JST1.25) |
| Tamanho de montagem | 25.5mm x 25.5mm |
Entradas/Saídas Específicas da Versão
| UART (3IN1) | UART 1 (Apenas RX/SBUS), UART 2 (Livre), UART 3 (Para RX), UART 4 (Livre/HD MSP) |
| UART (4IN1) | UART 1 (Para VTX), UART 2 (Livre), UART 3 (Para RX), UART 4 (NENHUM) |
| OSD | AT7456E (apenas versão 4IN1) |
| Porta VTX digital HD | SH1.0-6Pin (apenas versão 3IN1) |
Peso
| 3IN1 | 3.8±0.1g (conector da bateria excluído); 4.2±0.1g (conector da bateria incluído) |
| 4IN1 | 3.6±0.1g (conector da bateria excluído); 4.6±0.1g (conector de bateria incluído) |
ESC
| Entrada de energia | 1S apenas |
| Corrente | 12A contínuo, 18A pico |
| Protocolo de sinal digital | DSHOT300, DSHOT600 |
| Firmware ESC | A_X_5_96_v0.19.2.hex para firmware BB51 Bluejay |
Tabela de Comparação (conforme fornecido)
| Matrix 1S 3IN1 | Matrix 1S 4IN1 | F4 1S 5A AIO | |
| MCU | STM32G473CEU6 | STM32F411CEU6 | |
| Frequência MCU | 168MHz | 108MHz | |
| Gyro, taxa de amostragem máxima | ICM42688P, 8KHz | BMI270, 3.2KHz | |
| ESC | 12A contínuo | 1S, 5A | |
| Memória Blackbox | 16M | 8M | |
| OSD | - | Betaflight OSD: AT7456E | |
| RX | ELRS 2.4GHz Serial a Bordo | ||
| Conector do motor | JST1.25 | ||
| Peso | 3.8g | 3.6g | 3.64g |
Dados de Teste BEC (como mostrado)
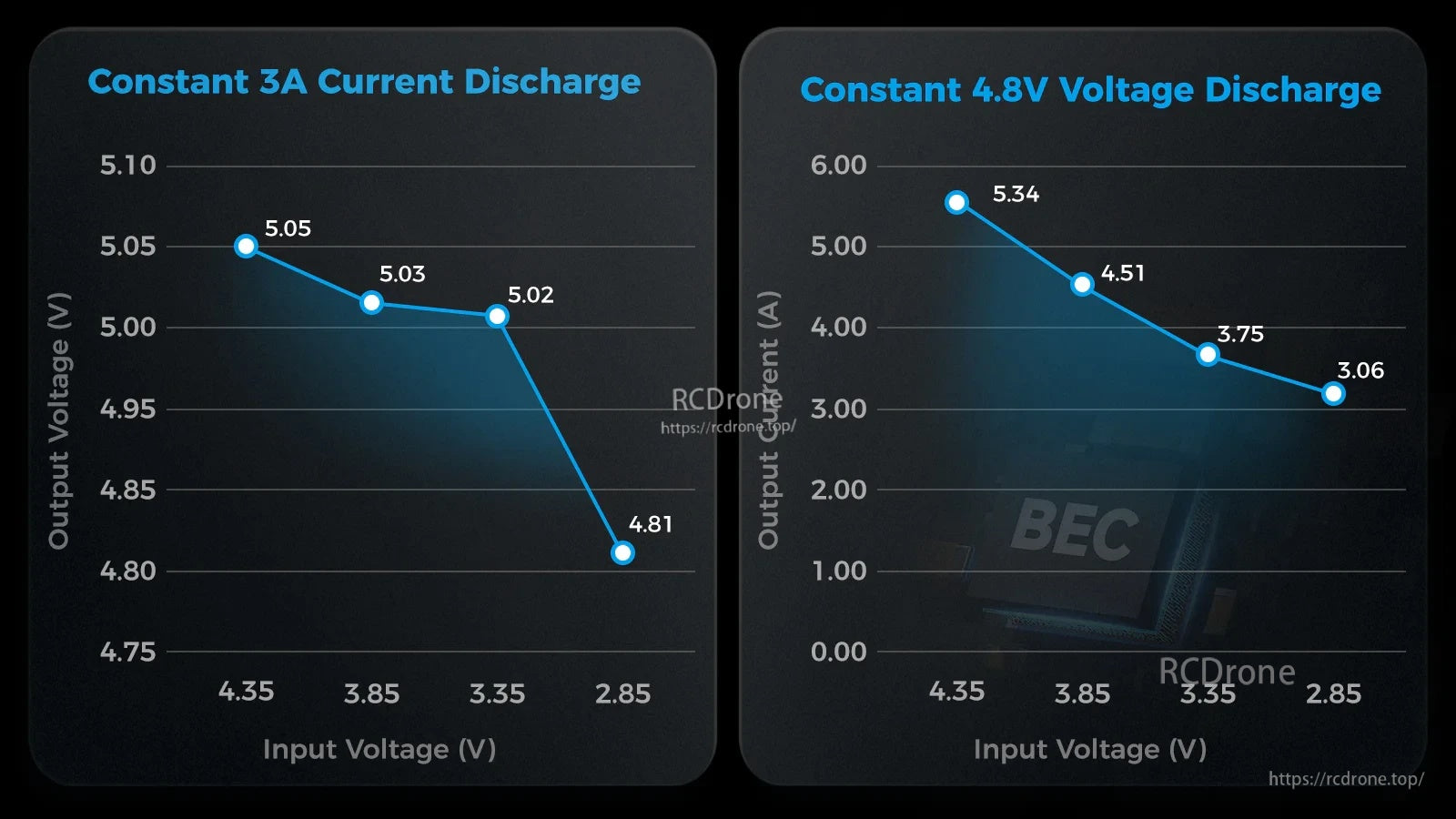
- Descarga de corrente constante de 3A: Entrada 4.35V → Saída 5.05V; 3.85V → 5.03V; 3.35V → 5.02V; 2.85V → 4.81V
- Descarga de tensão constante de 4.8V: Entrada 4.35V → Saída 5.34A; 3.85V → 4.51A; 3.35V → 3.75A; 2.85V → 3.06A
Portas & Notas de Configuração (dos diagramas)
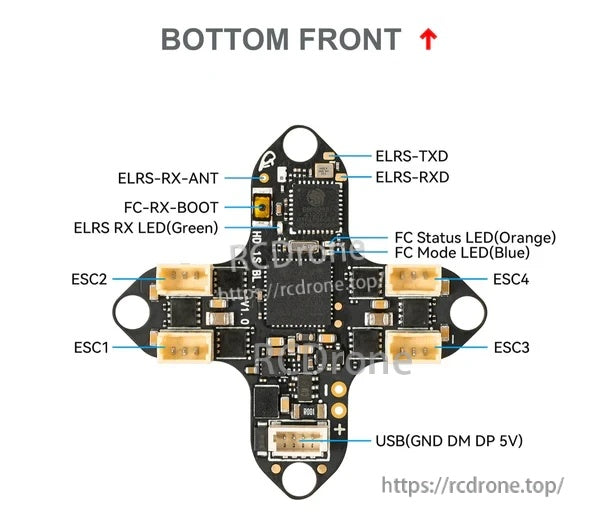
- Pinout USB mostrado: USB (GND, DM, DP, 5V).
- Os rótulos da placa 3IN1 mostrados incluem: RX3, RX2, TX2, TX3; BATT-, BATT+(1S), 5V, GND; SBUS (RX1), RX4, TX4; LED; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; FC-RX-BOOT; ELRS RX LED (Verde); FC Status LED (Laranja); FC Mode LED (Azul); ESC1/ESC2/ESC3/ESC4.
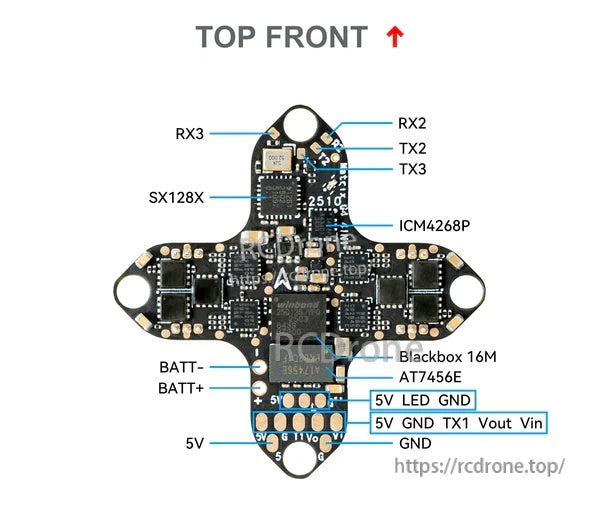
- Os rótulos da placa 4IN1 mostrados incluem: SX128X; ICM42688P; Blackbox 16M; AT7456E; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; ESP8285; STM32G473; FC-RX-BOOT; FC Status LED; FC-Mode LED; ESC1/ESC2/ESC3/ESC4; além de rótulos de pad incluindo 5V/LED/GND e 5V/GND/TX1/Vout/Vin.
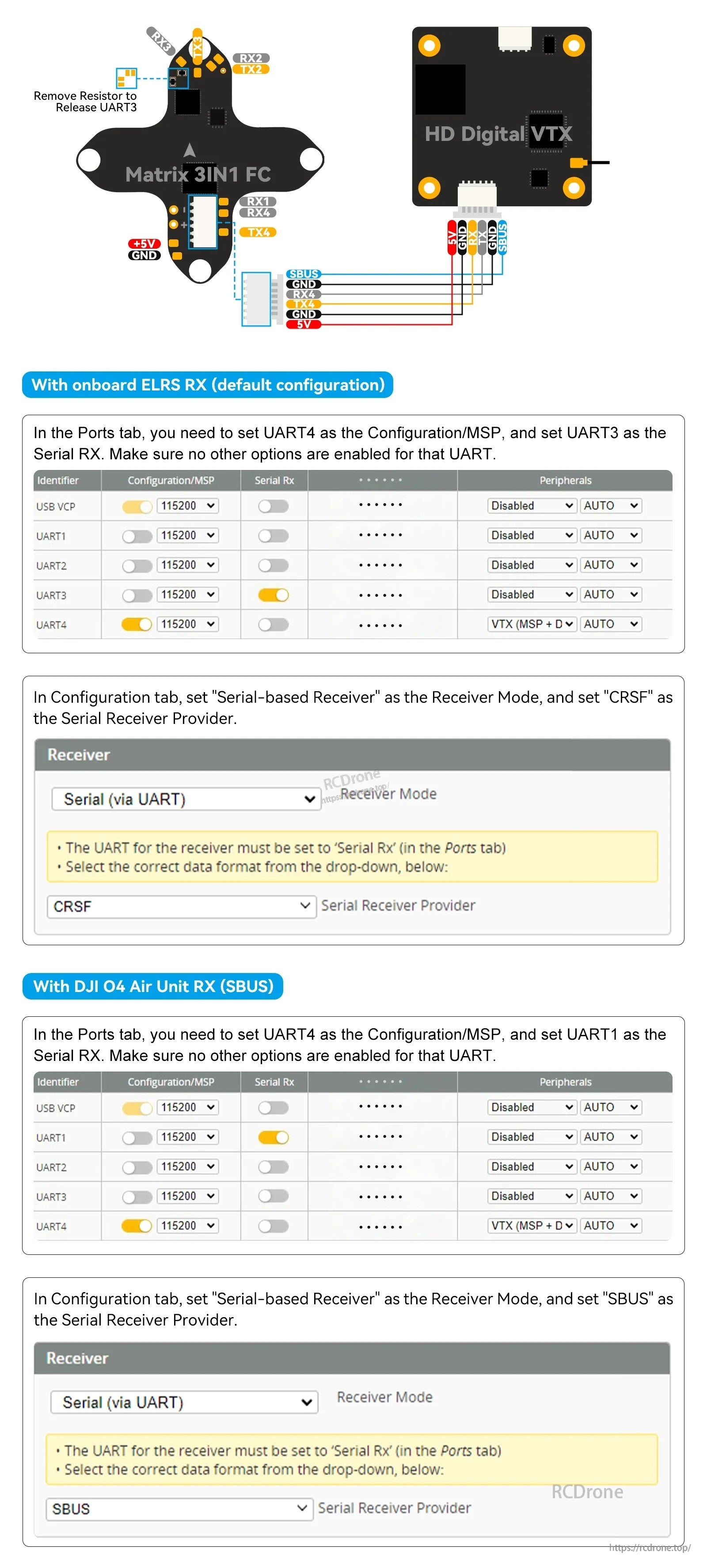
Configuração das portas Betaflight mostrada (3IN1)
- Com ELRS RX a bordo (padrão): defina UART4 para Configuração/MSP e UART3 para RX Serial (nenhuma outra opção ativada para UART3). Modo do receptor: Receptor baseado em Serial; Fornecedor do Receptor Serial: CRSF.
- Com DJI O4 Air Unit RX (SBUS): defina UART4 para Configuração/MSP e UART1 para RX Serial (nenhuma outra opção ativada para UART1). Modo do receptor: Receptor baseado em série; Fornecedor do receptor serial: SBUS.
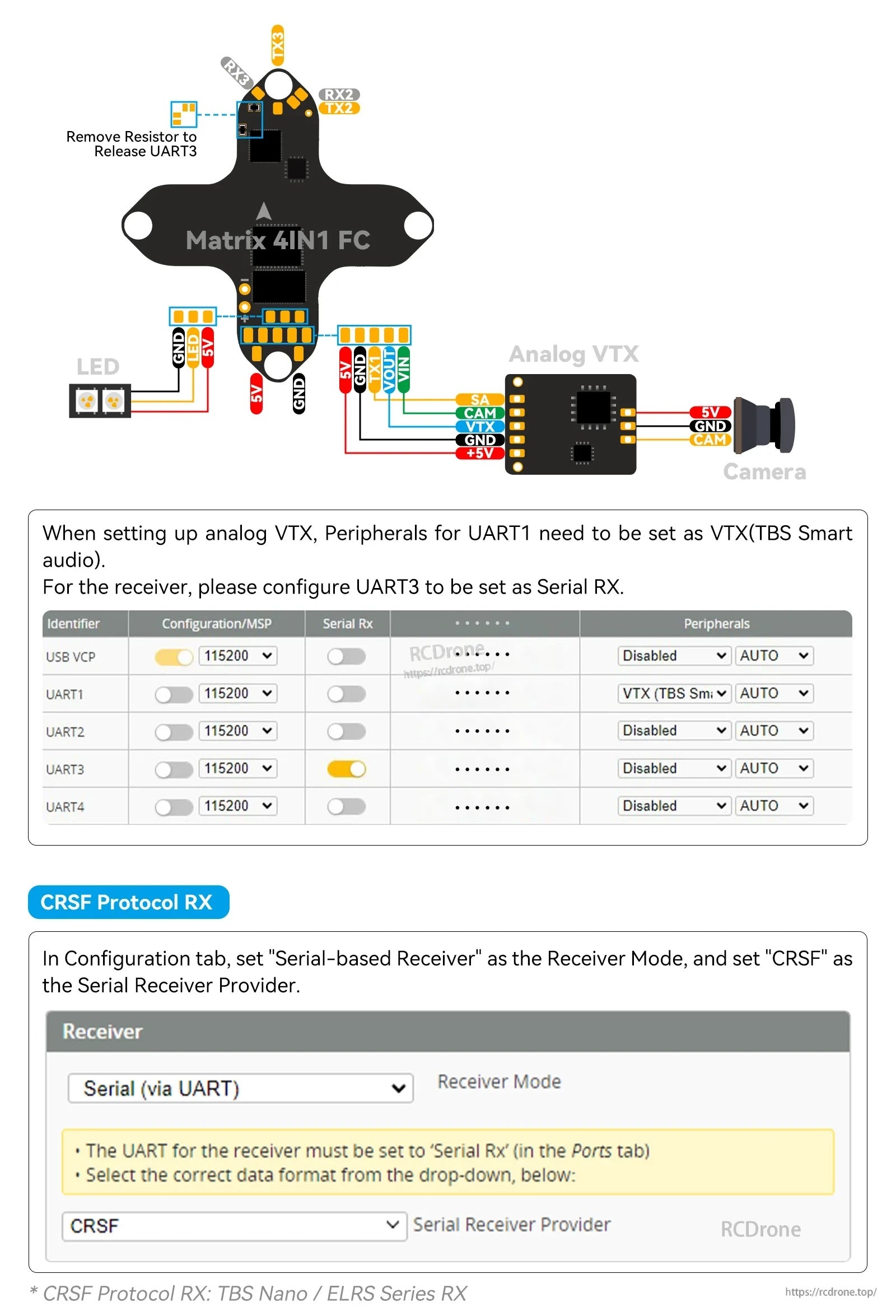
Configuração das portas Betaflight mostrada (4IN1)
- Ao configurar o VTX analógico: defina os periféricos para UART1 como VTX (TBS Smart audio).
- Para o receptor: configure UART3 como RX Serial.
- Nota do protocolo CRSF RX mostrada: TBS Nano / Série ELRS RX.
Firmware
- Firmware do FC (3IN1): Betaflight_4.5.1_BETAFPVG473
- Firmware do FC (4IN1): Betaflight_4.5.2_BETAFPVG473_V2
- Base de firmware do ESC (BB51 Bluejay): A_X_5_96_v0.19.2.hex (suporta DSHOT300/DSHOT600; menciona opções de frequência PWM fixa de 24KHz/48KHz/96KHz e melodias de arranque personalizadas)
Importante: A partir de 5 de janeiro de 2026, o FC 3IN1 será enviado com um giroscópio BMI270. Verifique a versão do giroscópio antes de atualizar o firmware. O Matrix 1S 3IN1 e 4IN1 requerem firmware diferente.
Nota: Evite atualizar o firmware do ESC com um intervalo mais curto; está indicado que isso pode aumentar a probabilidade de paragens e danificar o controlador de voo.
Manuais & Downloads
- Firmware 3IN1 + dump CLI: https://support.betafpv.com/hc/en-us/articles/41037090524697-Firmware-for-Matrix-1S-Brushless-Flight-Controller-3IN1-HD
- Firmware 4IN1 + dump CLI: https://support.betafpv.com/hc/en-us/articles/48215862783769-Firmware-for-Matrix-1S-Brushless-Flight-Controller-4IN1
- Notas de lançamento do Betaflight 4.5.1: https://github.com/betaflight/betaflight/releases/tag/4.5.1
- Notas de lançamento do Betaflight 4.5.2: https://github.com/betaflight/betaflight/releases/tag/4.5.2
- Projeto Bluejay: https://github.com/bird-sanctuary/bluejay
- Lançamentos do Bluejay: https://github.com/bird-sanctuary/bluejay/releases
- Configurador ESC: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Guia de atualização de firmware ELRS: https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
O que está incluído
Pacote do Controlador de Voo Sem Escovas Matrix 1S (3IN1)
- 1 * Controlador de Voo Sem Escovas Matrix 1S (3IN1)
- 1 * Adaptador Type-C para SH1.0
- 1 * Cabo Adaptador SH1.0-4Pin
- 1 * Cabo Adaptador SH1.0-6Pin
- 4 * M1.2*4 Parafusos auto-roscantes
- 4 * M1.4*5 Parafusos auto-roscantes
- 4 * Bolas de absorção de choque
Controlador de voo Brushless Matrix 1S (4IN1) pacote
- 1 * Controlador de voo Brushless Matrix 1S (4IN1)
- 1 * Adaptador Type-C para SH1.0
- 1 * Cabo adaptador SH1.0-4Pin
- 4 * M1.2*4 Parafusos auto-roscantes
- 4 * M1.4*5 Parafusos auto-roscantes
- 4 * Bolas de absorção de choque
Atenção
- Desenvolvido para novatos e pilotos recreativos, o Matrix FC utiliza uma placa de 1mm para durabilidade e é projetado para fácil instalação.
- Os controladores de voo estão cobertos por defeitos de fabricação. Problemas decorrentes de erros do usuário, danos físicos por colisão, danos durante a instalação ou desmontagem, modificações, picos de energia, incêndios elétricos ou exposição à água não estão cobertos.
Para questões de compatibilidade (seleção 3IN1 vs 4IN1, fiação ou firmware), contacte o suporte em https://rcdrone.top/ ou [email protected].
Detalhes

Escolha entre a placa 3IN1 para construções digitais HD e a opção 4IN1 que adiciona suporte para Betaflight OSD e VTX analógico.


O BEC atualizado de 5V/3A é caracterizado por uma saída estável em tensões de entrada típicas de 1S.

Conectores sem solda simplificam as instalações, com uma porta VTX digital HD dedicada e conectores de motor plug-in.

Para construções analógicas, a versão 4IN1 fornece pads de solda para ligar um VTX analógico externo.

Notas de configuração cobrem o mapeamento de portas Betaflight comum para construções digitais HD e o receptor Serial ELRS a bordo.
A orientação de configuração foca na fiação do VTX analógico e nas configurações CRSF para o receptor Serial ELRS a bordo.

Acessórios incluídos suportam uma configuração rápida e instalação na bancada, com um adaptador USB, cabo e hardware de montagem.

Related Collections





