

MUWEIDU K12060 Motor 24V 60W Motor DC Brushless FOC com Encoder 18bit, RS485/CAN, 115rpm
MUWEIDU K12060 Motor 24V 60W Motor DC Brushless FOC com Encoder 18bit, RS485/CAN, 115rpm
MUWEIDU
Não foi possível carregar a disponibilidade de recolha
Visão Geral
MUWEIDU O Motor K12060 é um motor DC sem escovas motor de servo (motor DC sem escovas de média a alta velocidade da série K) com design de acionamento elétrico integrado (driver embutido) e um encoder magnético. Suporta controle de velocidade/posição e comunicação RS485 ou CAN, e é projetado para juntas robóticas e de automação compactas e integradas.
Principais Características
- Motor servo FOC de alto desempenho
- Design de acionamento elétrico integrado: driver e encoder magnético embutidos
- Design integrado / leve / de alta precisão / alto torque
- Precisão do encoder atualizada de 14 bits para 18 bits
- Torque de arrasto do motor otimizado
- Entrada PWM suportada
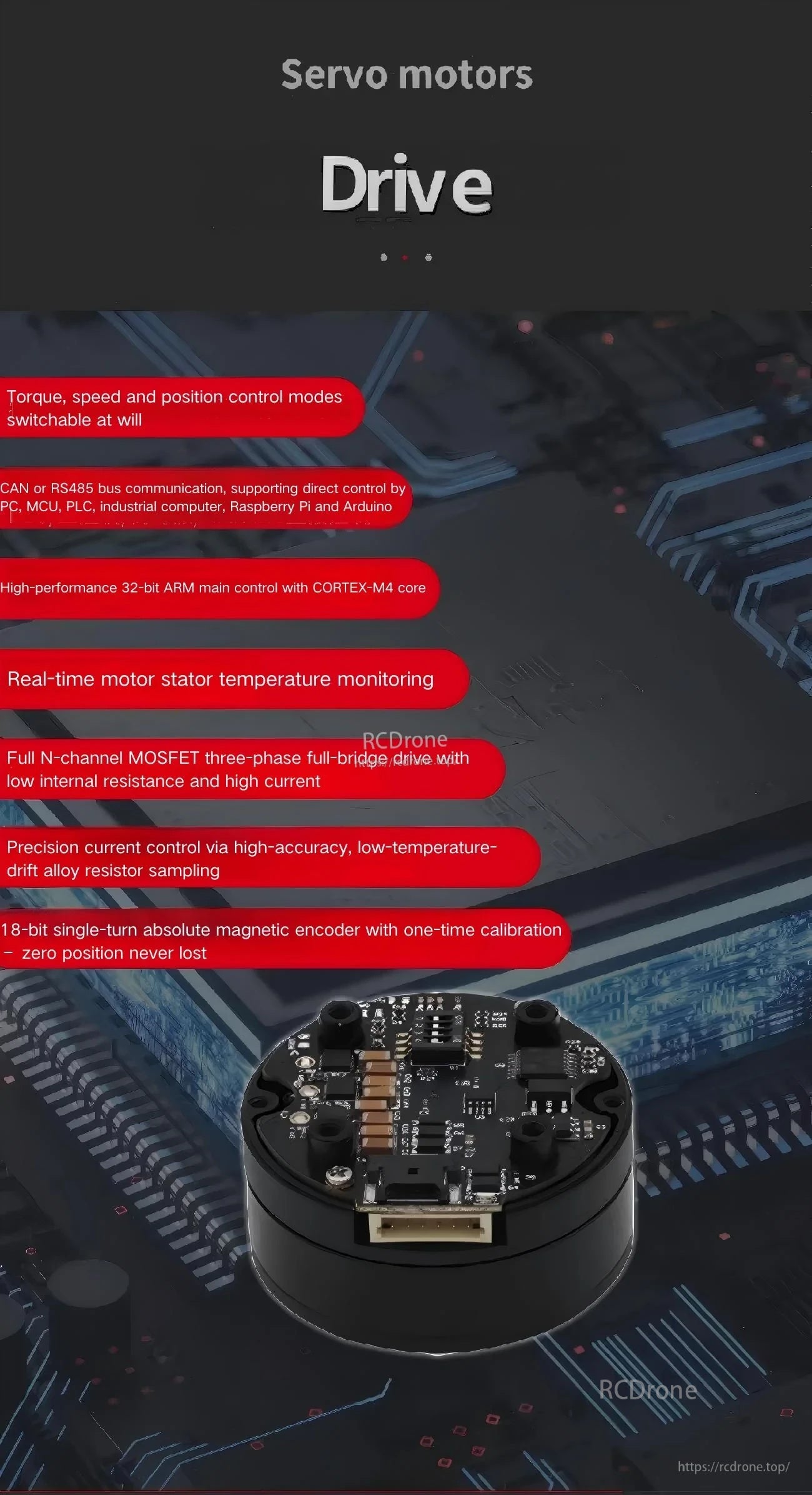
- Modos de controle de torque, velocidade e posição alternáveis à vontade
- Comunicação via barramento CAN ou RS485; suporta controle direto por PC, MCU, PLC, computador industrial, Raspberry Pi e Arduino
- Controle principal de alto desempenho de 32 bits ARM com núcleo CORTEX-M4
- Monitorização em tempo real da temperatura do estator do motor
- Driver de ponte completa trifásica com MOSFET N-channel completo, baixa resistência interna e alta corrente
- Controle de corrente de precisão através de amostragem de resistor de liga de alta precisão e baixa deriva térmica
- Encoder magnético absoluto de 18 bits de uma volta com calibração única; posição zero nunca perdida
- Design leve: estrutura plana com material de alumínio de grau aeronáutico
- Saída de alto torque: rotor externo emparelhado com ímãs de neodímio ferro boro
- Design de produto de padrão ultra-alto
Especificações
| Modelo | K12060 |
| Tensão Nominal | 24V |
| Corrente Nominal | 4A |
| Poder de Pico | 60W |
| Torque Nominal | 5N.m |
| Torque Máximo | 10N.m |
| Velocidade Avaliada | 115rpm |
| Encoder | 18bit |
| Inércia do Rotor | 5500gcm^2 |
| Monitorização da Temperatura do Motor | SIM |
| Modos de Controlo | Velocidade/Posição |
| Protocolo de Comunicação | RS485 ou CAN |
| Dimensões Totais | Phi120mm x 49mm |
| Peso | 1147g |
Definição da Interface
- COMUTADOR ID
- CAN/RS485
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Fonte de Alimentação Negativa |
| V- | Fonte de Alimentação Negativa |
| V+ | Fonte de Alimentação Positiva |
| V+ | Fonte de Alimentação Positiva |
| T | Transmissor UART |
| R | Receptor UART |
| G | GND de Sinal |
Aplicações
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
- Robô de Inspeção
- Câmara Portátil
- LiDAR
- Suporte Gimbal
Para orientação de integração e perguntas pré-venda (fiação de comunicação, modos de controle e documentação), contacte [email protected] or visite https://rcdrone.top/ .
Manuais
Detalhes

Um motor servo FOC da série K compacto, projetado para juntas robóticas integradas, combinando o motor, driver e encoder em uma única carcaça.

O design de acionamento elétrico integrado reduz a fiação e economiza espaço ao combinar o motor, a eletrónica do driver e o encoder magnético.
Alternar entre controle de torque, velocidade e posição, com comunicação CAN ou RS485 para PC, MCU, PLC ou controladores embutidos.

A rotulagem clara da interface inclui um interruptor de ID e pinos dedicados para conexões de energia, barramento CAN/RS485 e sinais UART.

Ferramentas baseadas em PC suportam ajuste de parâmetros, testes e atualizações de firmware em múltiplos modos de controle.

Bem adequado para construções de automação e robótica, como plataformas de inspeção, estabilização de câmaras, LiDAR e suportes de gimbal.
Related Collections

