

Motor MUWEIDU K4028 12V FOC Servo Brushless DC, Encoder 18bit, RS485/CAN, 560rpm
Motor MUWEIDU K4028 12V FOC Servo Brushless DC, Encoder 18bit, RS485/CAN, 560rpm
MUWEIDU
Não foi possível carregar a disponibilidade de recolha
Visão Geral
MUWEIDU O Motor K4028 é um motor DC sem escovas de média a alta velocidade da série K, projetado como um motor servo de alto desempenho com um conceito de acionamento elétrico integrado. Está especificado com um encoder de 18 bits, suporta controle de velocidade/posição e comunica-se via RS485 ou CAN para integração em sistemas de robótica e automação.
Características Principais
- Motor DC brushless de velocidade média a alta da série K; motor servo FOC de alto desempenho
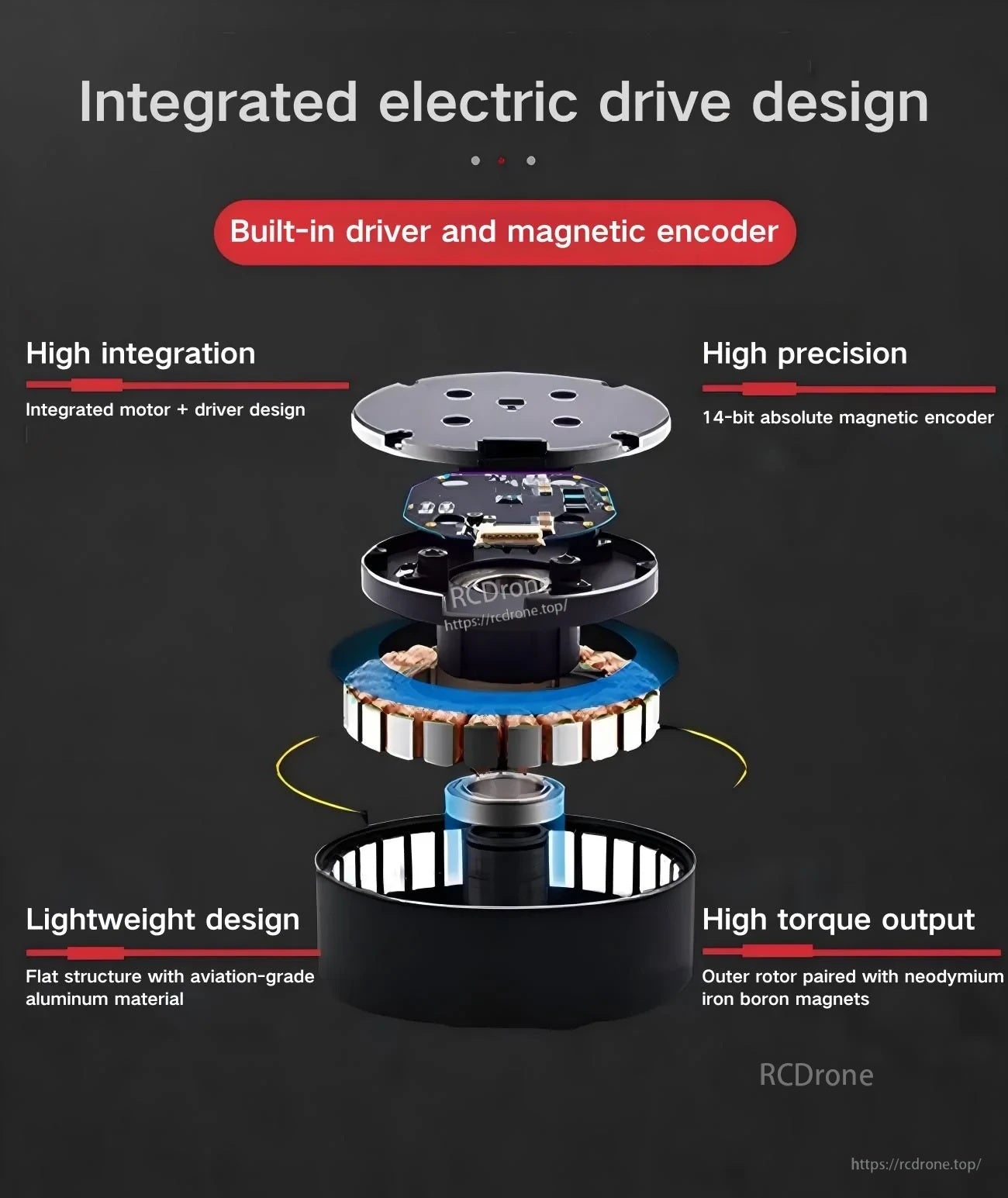
- Design de acionamento elétrico integrado; driver e encoder magnético embutidos
- Design integrado de motor + driver
- Estrutura leve e plana com material de alumínio de grau aeronáutico
- Saída de alto torque; rotor externo emparelhado com ímãs de neodímio ferro boro
- Monitorização da temperatura do motor: SIM
- Múltiplos modos de controlo mostrados: Modo de Torque, Modo de Velocidade, Modo de Controlo Multi-Rotação (com limite de velocidade), Modo de Posição + Direção de Rotação Única (com limite de velocidade), Modo de Posição Incremental (com limite de velocidade)
- Ajuste de parâmetros / teste / atualização de firmware baseado em PC disponível
- Compatível com plataformas de desenvolvimento de código aberto, incluindo PC, MCU, PLC, computador industrial e Raspberry Pi
- Mecanismos de proteção em múltiplas camadas; função de travão reservada (Travão / Liberação do Travão)
- Entrada PWM suportada
- Torque de engate do motor otimizado
- Nota de atualização da precisão do encoder: de 14 bits para 18 bits
Especificações
| Modelo | K4028 |
| Tensão Nominal | 12V |
| Corrente Nominal | 1.43A |
| Pico de Potência | 8.9W |
| Torque Nominal | 0.15 N.m |
| Torque de Pico | 0.33 N.m |
| Velocidade Nominal | 560 rpm |
| Encoder | 18bit |
| Inércia do Rotor | 81 gcm² |
| Monitorização da Temperatura do Motor | SIM |
| Modos de Controlo | Velocidade/Posição |
| Protocolo de Comunicação | RS485 ou CAN |
| Dimensões Gerais | Φ39.6mm × 28mm |
| Peso | 90 g |
Definição da Interface (CAN/RS485)
| Interface | Nota |
|---|---|
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Fonte de alimentação negativa |
| V- | Fonte de alimentação negativa |
| V+ | Fonte de alimentação positiva |
| V+ | Fonte de alimentação positiva |
| T | Transmissor UART |
| R | Receptor UART |
| G | GND de sinal |
O interruptor ID está disponível no motor para identificação/configuração.
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
- Sistemas de robôs de inspeção
- Sistemas de câmaras portáteis
- Plataformas relacionadas com LiDAR
- Sistemas de gimbal pod
Manuais / Documentos
Para orientação na seleção ou suporte à integração do Motor MUWEIDU K4028 (RS485/CAN), contacte [email protected] or visite https://rcdrone.top/.
Detalhes

Construído em torno de um conceito de acionamento elétrico integrado, o K4028 combina um motor BLDC compacto, driver e encoder para controlo servo preciso.
Um conjunto de motor + driver tudo-em-um ajuda a reduzir a fiação e simplifica a integração em construções de robótica e automação.

O etiquetagem clara da interface suporta uma configuração rápida para comunicação RS485 ou CAN, com um interruptor de ID para identificação do dispositivo no barramento.
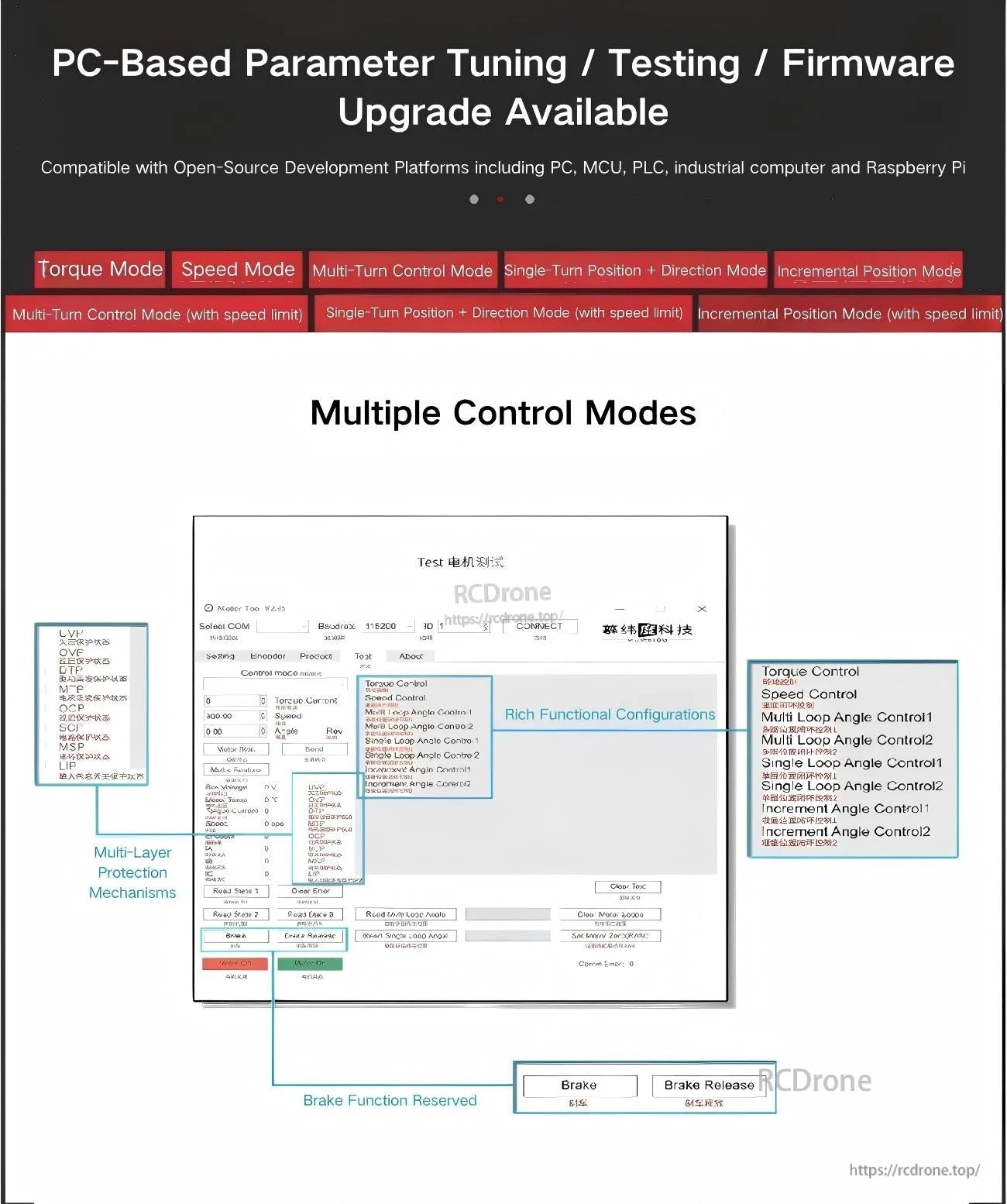
As ferramentas de PC permitem ajuste de parâmetros, testes e atualizações de firmware, com múltiplos modos de controle de torque, velocidade e posição disponíveis.
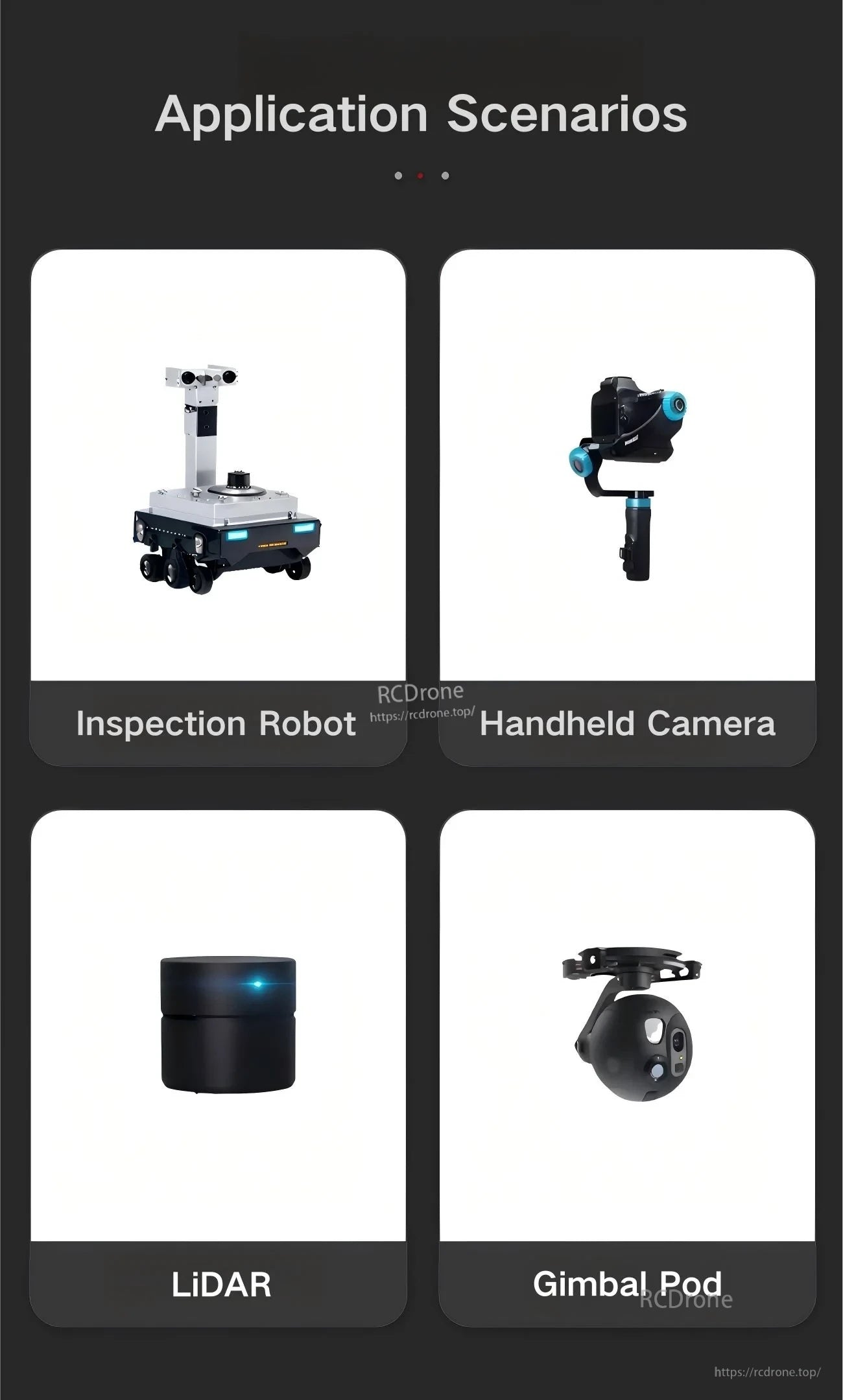
Bem adequado para tarefas de controle de movimento compactas, como robôs de inspeção, gimbals e plataformas relacionadas com LiDAR.
Related Collections

