

Motor FOC MUWEIDU K5020 Servo Motor 16V 1100rpm Encoder 18-bit, RS485/CAN Driver Integrado para Robots
Motor FOC MUWEIDU K5020 Servo Motor 16V 1100rpm Encoder 18-bit, RS485/CAN Driver Integrado para Robots
MUWEIDU
Não foi possível carregar a disponibilidade de recolha
Visão Geral
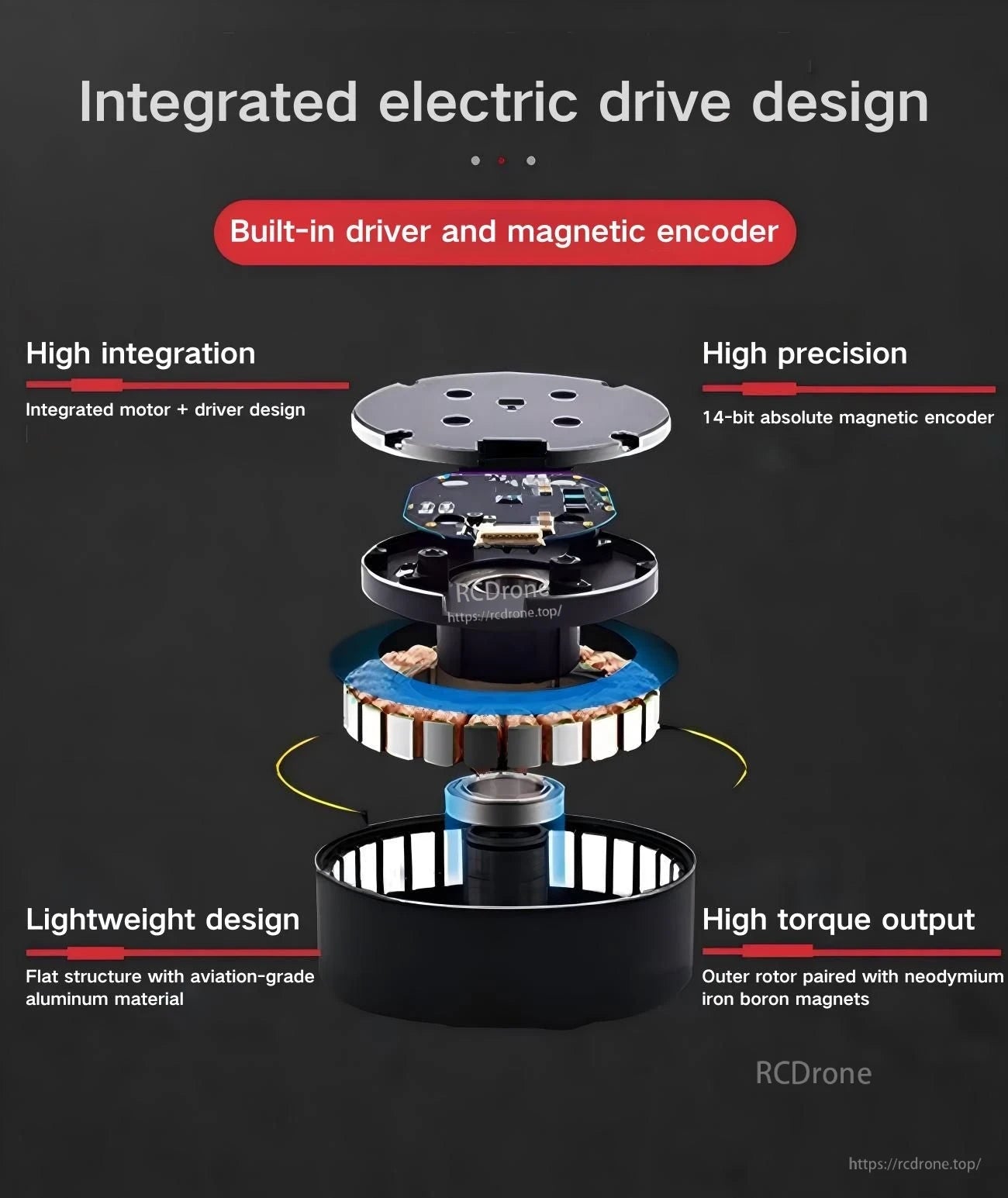
MUWEIDU K5020 Motor é um motor servo de corrente contínua sem escovas de alta velocidade da série K com design de motor servo FOC. Utiliza um design de acionamento elétrico integrado com um driver embutido e encoder magnético, suportando controle de velocidade/posição e comunicação RS485 ou CAN.
Principais Características
- Motor servo FOC de alto desempenho
- Design integrado de motor + driver (driver embutido e encoder magnético)
- Design integrado, leve, de alta precisão e alto torque
- Precisão do encoder atualizada de 14 bits para 18 bits
- Torque de arrasto do motor otimizado
- Entrada PWM suportada
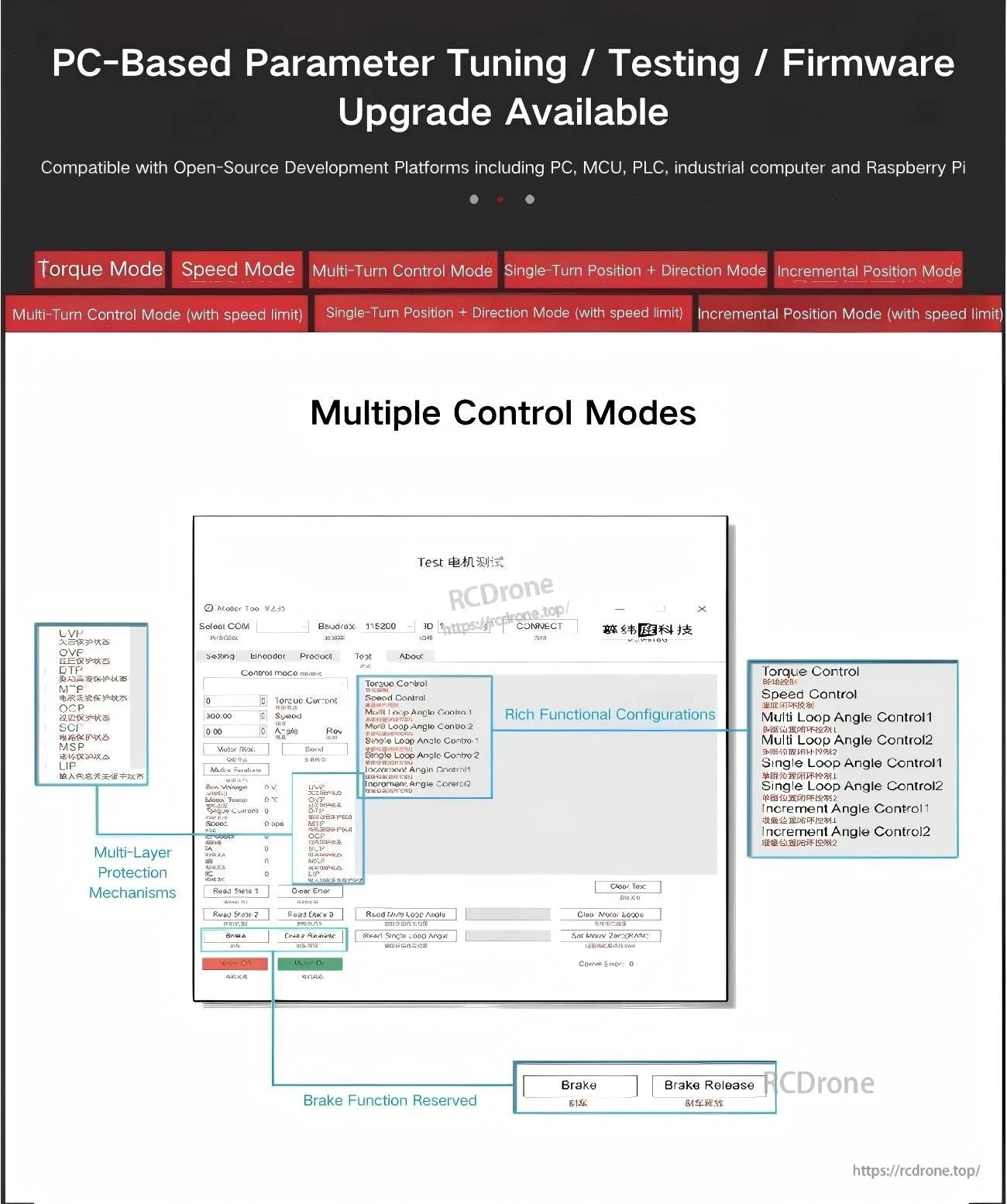
- Ajuste/teste de parâmetros/atualização de firmware baseado em PC disponível
- Compatível com plataformas de desenvolvimento de código aberto, incluindo PC, MCU, PLC, computador industrial e Raspberry Pi
- Múltiplos modos de controle mostrados: Modo de Torque, Modo de Velocidade, Modo de Controle Multi-Rotação, Modo de Posição + Direção de Rotação Única, Modo de Posição Incremental
- Função de freio reservada (Freio / Liberação do Freio mostrada)
Para ajuda na seleção e suporte à integração, contacte [email protected] or visite https://rcdrone.top/.
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
- Robô de inspeção
- Câmara portátil
- LiDAR
- Suporte gimbal
Especificações
| Modelo | K5020 |
| Tensão nominal | 16V |
| Corrente nominal | 1.3A |
| Pico de potência | 15W |
| Torque nominal | 0.12 N.m |
| Torque de pico | 0.4 N.m |
| Velocidade Avaliada | 1100 rpm |
| Encoder | 18 bits |
| Inércia do Rotor | 136 gcm^2 |
| Monitorização da Temperatura do Motor | SIM |
| Modos de Controlo | Velocidade/Posição |
| Protocolo de Comunicação | RS485 ou CAN |
| Dimensões Totais | Phi49mm x 23.9mm |
| Peso | 104 g |
Definição da Interface
- ID SWITCH
- Conector CAN/RS485
| Interface | Nota |
|---|---|
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Fonte de alimentação negativa |
| V- | Fonte de alimentação negativa |
| V+ | Fonte de alimentação positiva |
| V+ | Fonte de alimentação positiva |
| T | Transmissor UART |
| R | Receptor UART |
| G | GND de sinal |
Manuais & Arquivos
Detalhes

Construído para projetos de robótica que necessitam de um motor servo compacto, integrado e com suporte a feedback de alta precisão e PWM.
A construção integrada de motor + driver ajuda a simplificar a fiação, mantendo a montagem leve para articulações móveis.
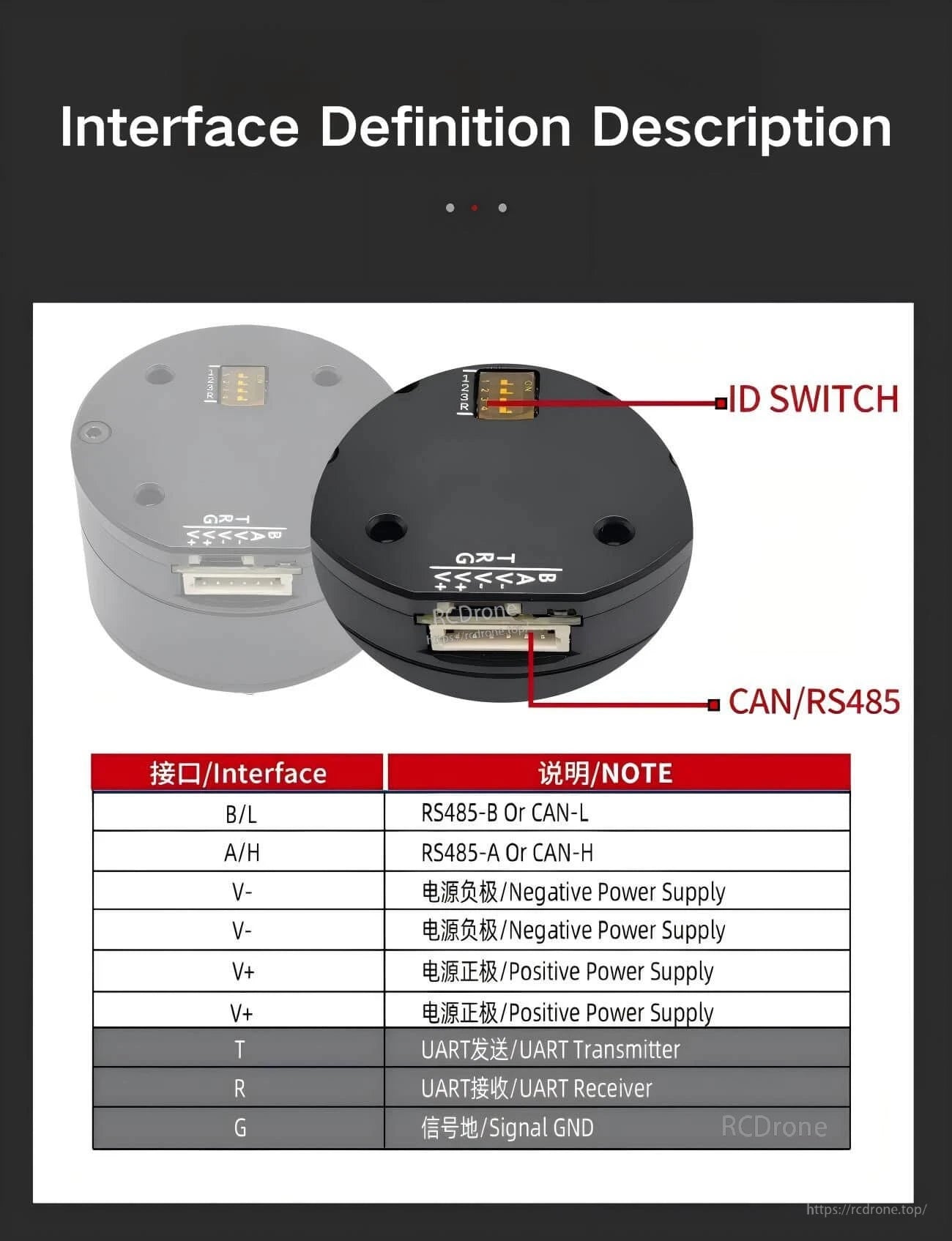
A rotulagem clara da interface facilita a configuração do ID do dispositivo e a conexão de CAN ou RS485 juntamente com os pinos de alimentação e UART.

Related Collections

