

MUWEIDU K9050 Motor FOC Servo Motor, Encoder 18-bit 24V, RS485/CAN, Controlo de Velocidade/Posição (16T/35T)
MUWEIDU K9050 Motor FOC Servo Motor, Encoder 18-bit 24V, RS485/CAN, Controlo de Velocidade/Posição (16T/35T)
MUWEIDU
Não foi possível carregar a disponibilidade de recolha
Visão geral
MUWEIDU K9050 Motor é um motor de corrente contínua sem escovas FOC servo motor com um design de driver integrado (driver embutido) e um encoder magnético. Suporta controlo de velocidade/posição com comunicação RS485 ou CAN, e inclui monitorização da temperatura do motor para integração de sistemas em projetos de robótica e automação.
Principais Características
- Motor DC sem escovas de velocidade média a alta da série K; motores servo
- Motor servo FOC de alto desempenho
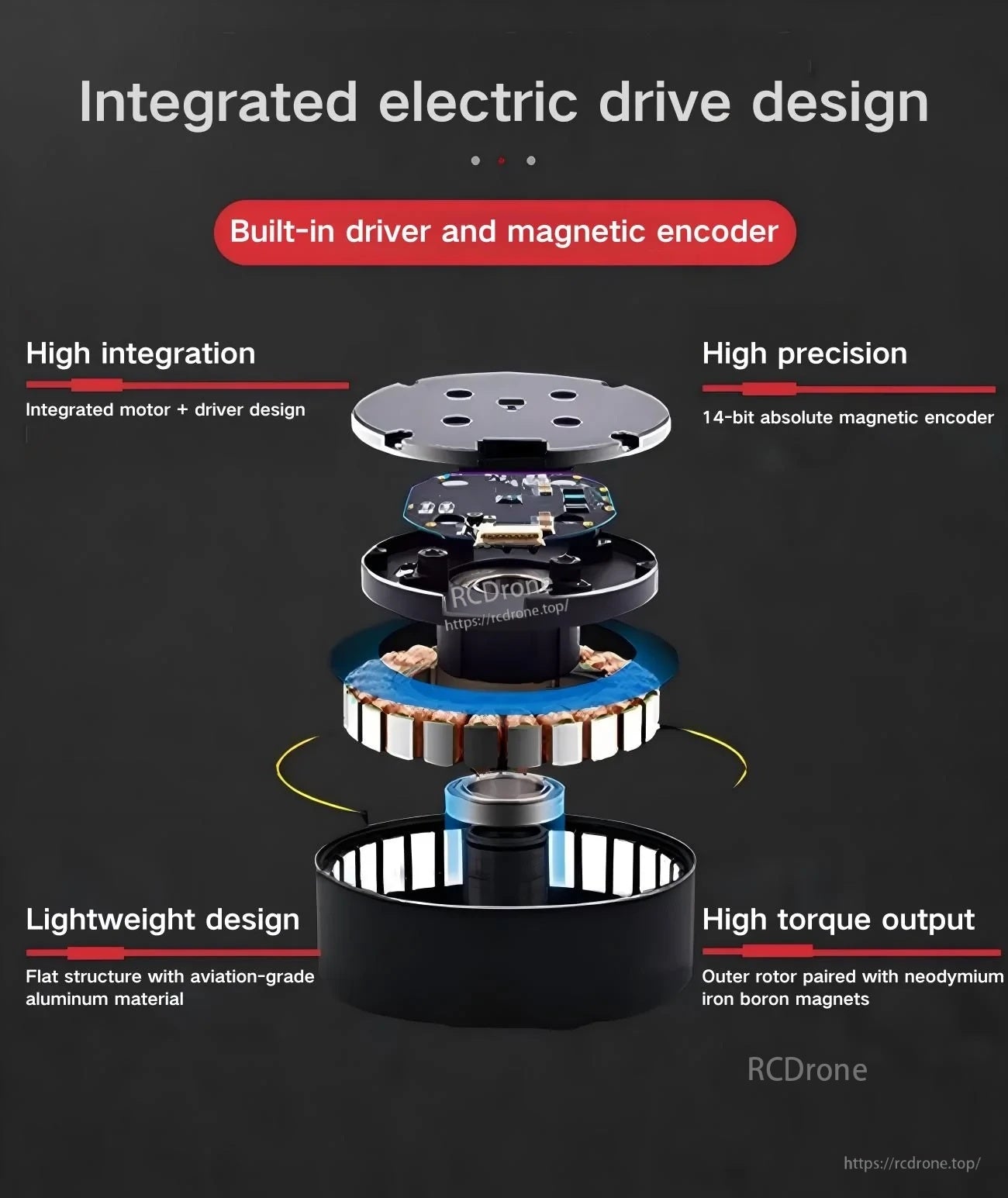
- Design de acionamento elétrico integrado: driver e encoder magnético embutidos (motor + driver integrados)
- Atualização da precisão do encoder notada: de 14 bits para 18 bits; encoder magnético absoluto de 18 bits de uma volta com calibração única (posição zero nunca perdida)
- Torque de arrasto do motor otimizado
- Entrada PWM suportada
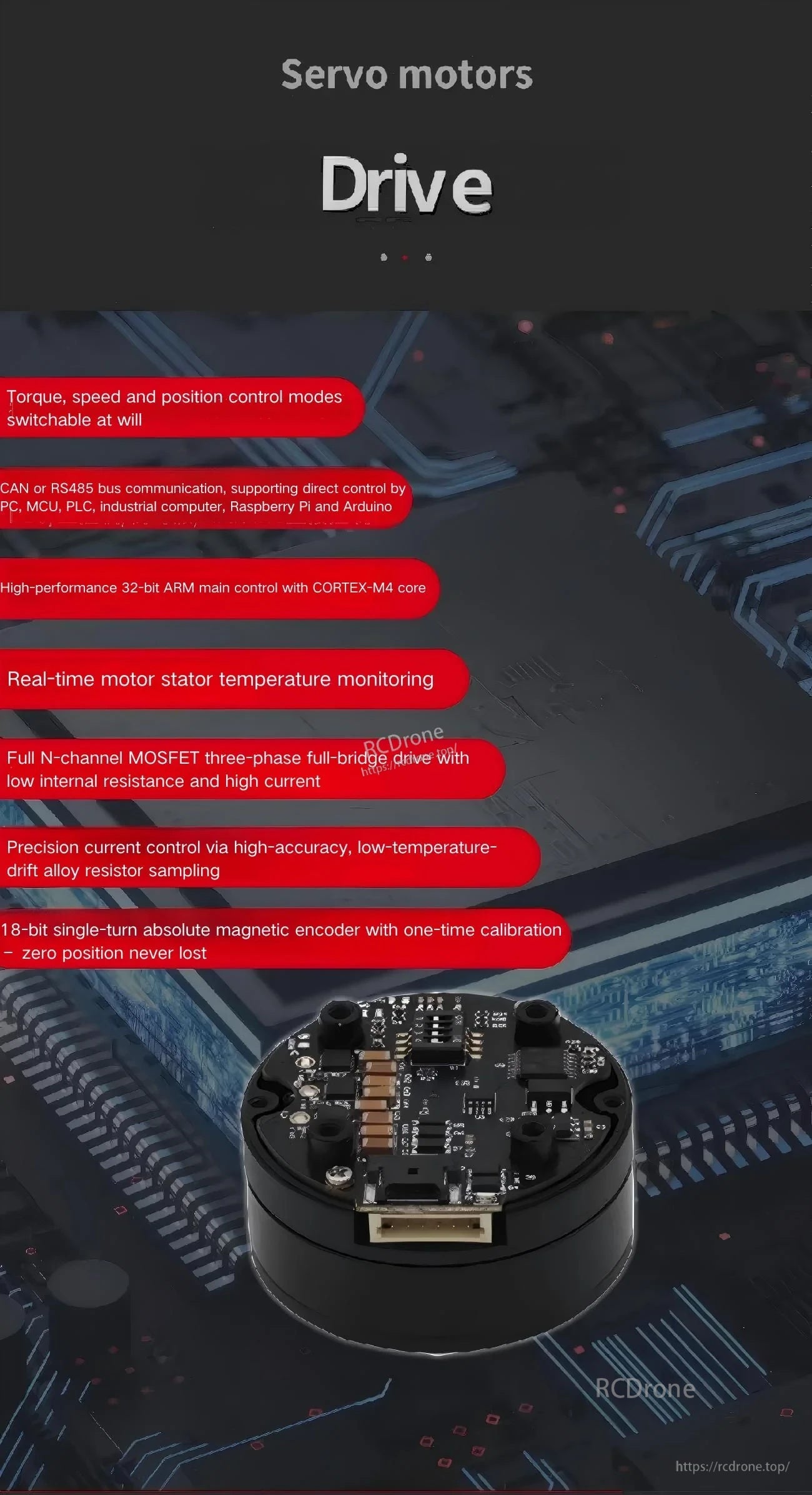
- Modos de controle de torque, velocidade e posição alternáveis
- Comunicação CAN ou RS485; compatível com plataformas de desenvolvimento de código aberto, incluindo PC, MCU, PLC, computador industrial, Raspberry Pi e Arduino
- Controle principal de alto desempenho de 32 bits com núcleo CORTEX-M4
- Monitorização em tempo real da temperatura do estator do motor
- Driver de ponte completa trifásica com MOSFET N-channel completo, com baixa resistência interna e alta corrente
- Controlo de corrente de precisão através de amostragem de resistor de liga de alta precisão e baixa deriva térmica
Especificações
| Modelo | K9050 (16T/35T) |
| Tensão Nominal | 24V |
| Corrente Nominal | 7.45A / 3.46A |
| Pico de Potência | 170W / 38W |
| Torque Nominal | 2.42 N.m / 2.79 N.m |
| Torque de Pico | 4.5 N.m / 5.8 N.m |
| Velocidade Avaliada | 490 rpm / 130 rpm |
| Encoder | 18bit |
| Inércia do Rotor | 4656 gcm² |
| Monitorização da Temperatura do Motor | SIM |
| Modos de Controlo | Velocidade/Posição |
| Protocolo de Comunicação | RS485 ou CAN |
| Dimensões Gerais | Φ89mm x 53mm |
| Peso | 963 g |
Interface (Notas do Conector CAN/RS485)
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Fonte de alimentação negativa |
| V+ | Fonte de alimentação positiva |
| T | Transmissor UART |
| R | Receptor UART |
| G | Sinal GND |
Também rotulado como: SWITCH DE ID e CAN/RS485 .
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
- Robô de inspeção
- Câmara portátil
- LiDAR
- Suporte gimbal
Manuais / Documentos
Para verificações de compatibilidade ou suporte de integração (fiação RS485/CAN, ajuste de parâmetros e seleção de modo de controle), entre em contato com o suporte em https://rcdrone.top/ ou envie um e-mail para [email protected] .
Detalhes

Um motor de passo FOC de 24V compacto servo motor projetado para robótica e automação, com eletrónica de controlo integrada e feedback de encoder absoluto.
A construção integrada de motor + driver simplifica a fiação e mantém o atuador leve para instalações compactas.
Alternar entre controle de torque, velocidade e posição, e conectar via CAN ou RS485 com monitorização de temperatura integrada para uma integração mais segura.

Rotulagem clara dos pinos para fiação do barramento CAN/RS485, entrada de energia, linhas UART e o interruptor de ID a bordo para suportar configurações de múltiplos nós.
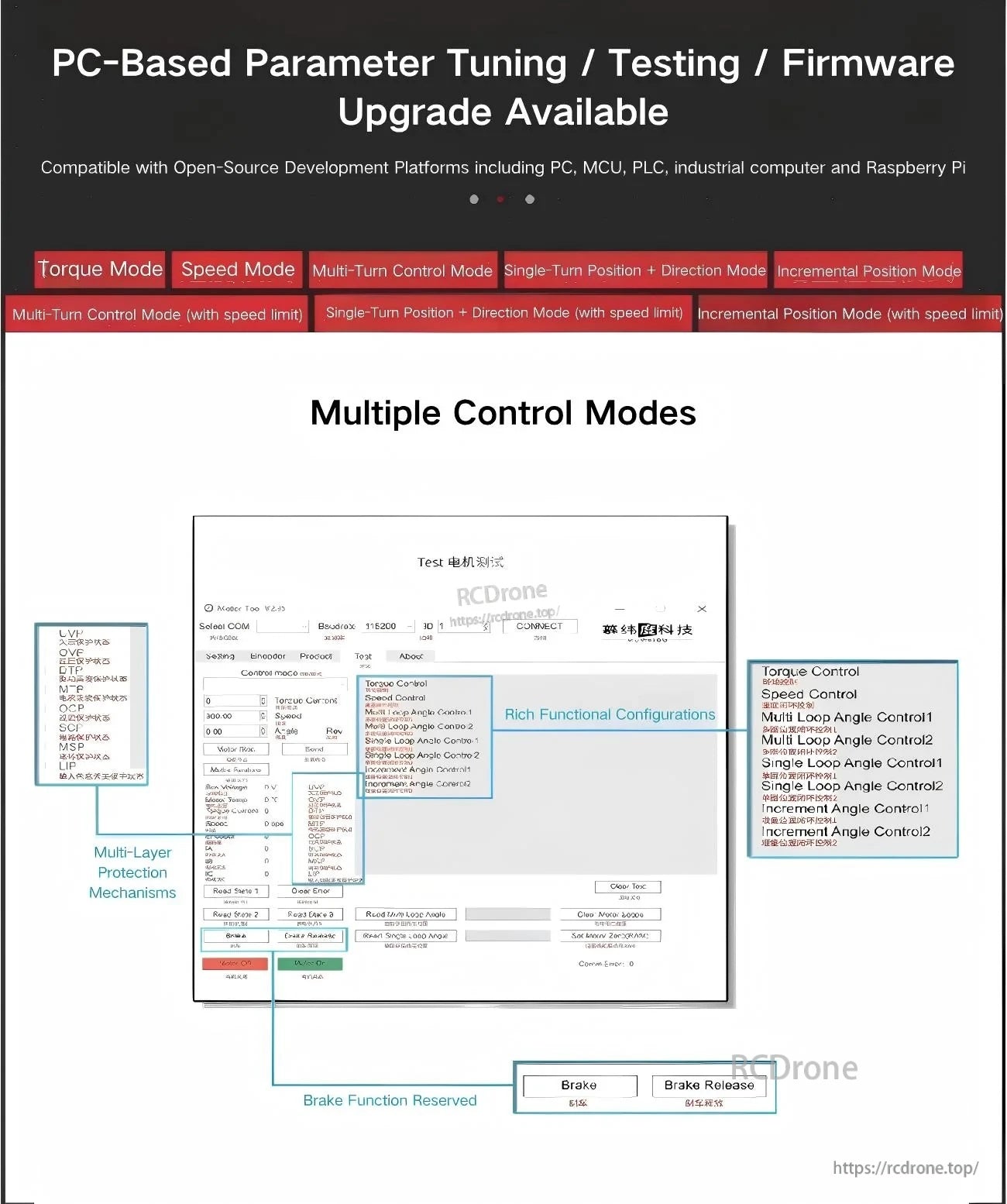
O suporte de software para PC ajuda a acelerar a comissionamento com ajuste de parâmetros, testes e atualizações de firmware em múltiplos modos de controle.
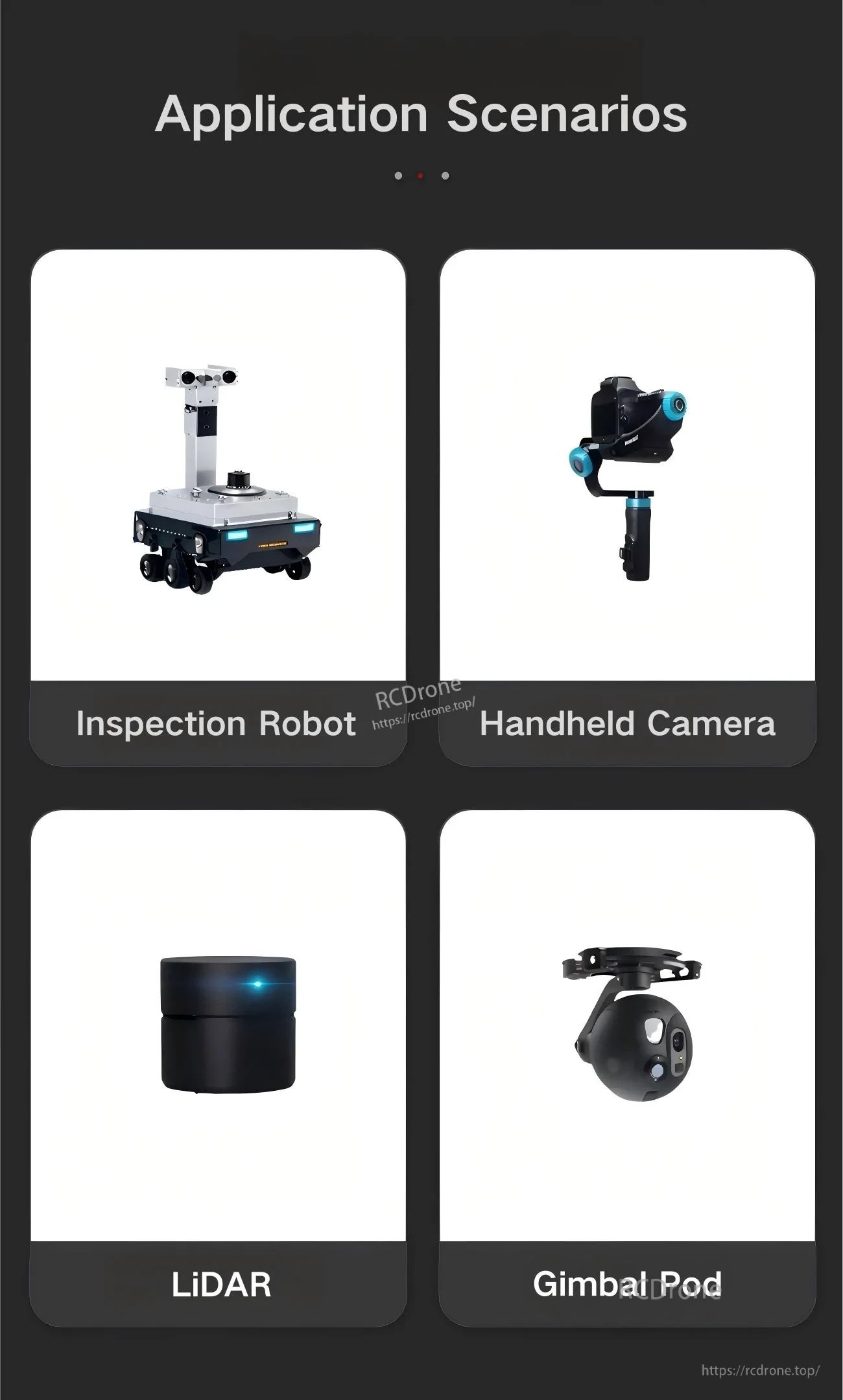
Construído para projetos de controle de movimento que vão desde robôs de inspeção móveis até plataformas estabilizadas para câmaras e sensores.
Related Collections

