

MUWEIDU L3526 Motor 12V Mini Servo Motor, Encoder de 15 bits, Controlo de Velocidade/Posição RS485 para Robótica
MUWEIDU L3526 Motor 12V Mini Servo Motor, Encoder de 15 bits, Controlo de Velocidade/Posição RS485 para Robótica
MUWEIDU
Não foi possível carregar a disponibilidade de recolha
Visão geral
MUWEIDU L3526 Motor é um mini motor servo numa série de motores DC sem escovas de baixa velocidade e alta precisão, projetado para aplicações de acionamento elétrico integrado que requerem operação estável e suave. Suporta controle de velocidade/posição e utiliza comunicação RS485.
Características Principais
- Série de motores DC sem escovas de baixa velocidade & alta precisão (mini motores servo)
- Operação estável & suave
- Monitorização da temperatura do motor: SIM
- Atende aos requisitos de controlo de posição de baixa velocidade e alta precisão
- Design de rotor externo multi-estágio achatado proporciona maior torque, ideal para aplicações com espaço limitado
- Estrutura sem escovas combinada com rolamentos de alto desempenho garante rotação mais suave e maior vida útil
- Resistores de liga de alta precisão e baixa deriva térmica realizam amostragem e controlo de corrente precisos
- Driver de ponte completa N-channel trifásico apresenta baixa resistência interna e alta saída de corrente
- Suporta comutação sem interrupções entre modos de controlo de torque em malha aberta, velocidade e posição
Especificações
| Modelo | L3526 |
| Tensão Nominal | 12V |
| Corrente Nominal | 0.79A |
| Pico de Potência | 6.4W |
| Torque Nominal | 0.05 N.m |
| Pico de Torque | 0.13 N.m |
| Velocidade Avaliada | 1250 rpm |
| Encoder | 15 bits |
| Inércia do Rotor | 58 gcm² |
| Monitorização da Temperatura do Motor | SIM |
| Modos de Controlo | Velocidade/Posição |
| Protocolo de Comunicação | RS485 |
| Dimensões Totais | Φ35 mm × 26 mm |
| Peso | 50 g |
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
Manuais
Para orientação na seleção, suporte à integração ou questões sobre documentação, entre em contato [email protected] or visite https://rcdrone.top/ .
Detalhes

Os servomotores mini compactos são projetados para movimentos de baixa velocidade e alta precisão, onde uma operação suave e estável é importante.

Um design de acionamento integrado combina uma estrutura de rotor externo, rolamentos de qualidade e detecção de corrente precisa para um controle de torque eficaz.
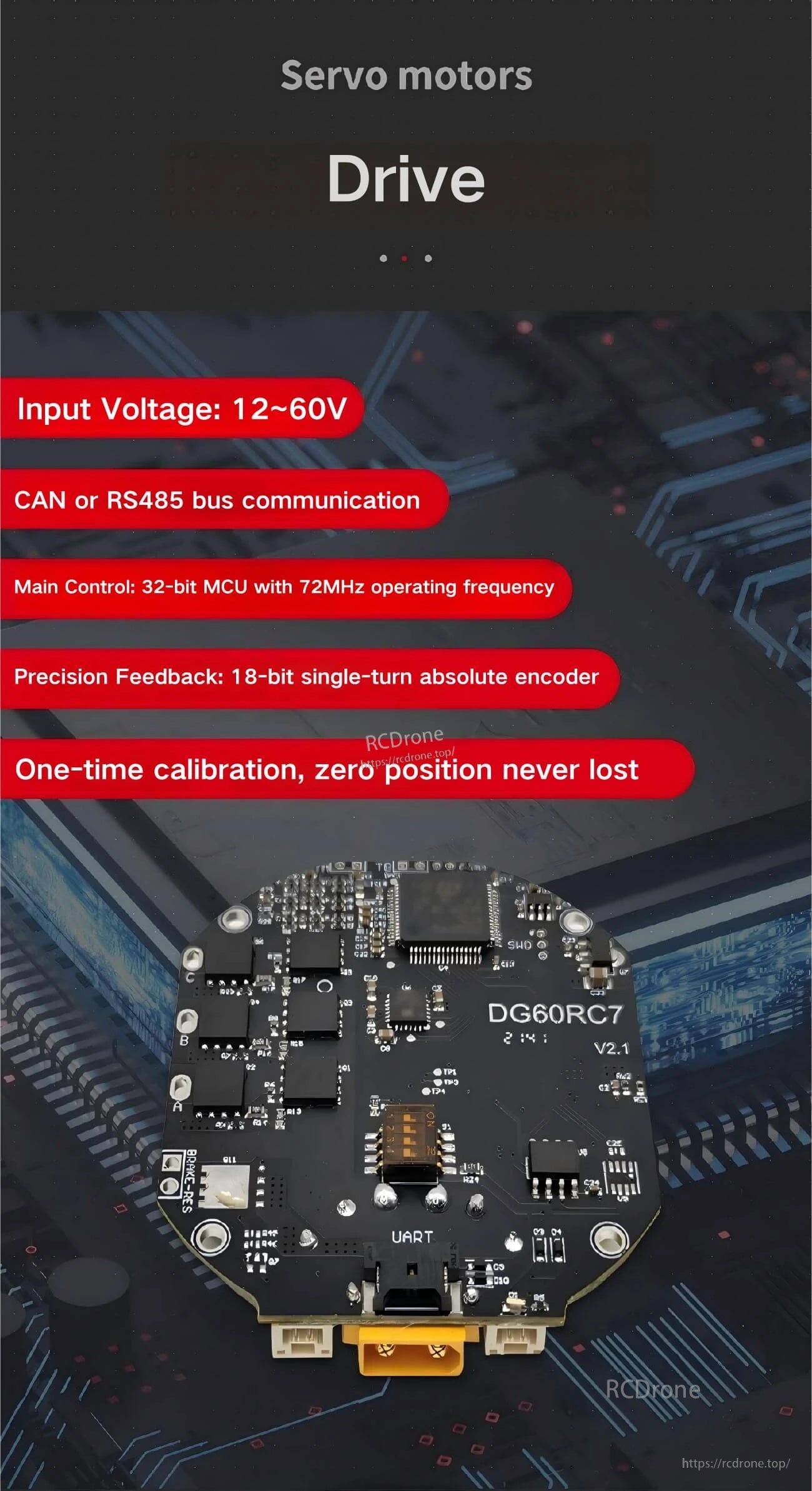
A comunicação RS485 e a eletrónica de controlo a bordo suportam comandos de velocidade/posição com feedback de encoder para controlo de movimento em malha fechada.

A fiação permanece simples com uma porta CAN/RS485 rotulada, um interruptor de ID para configuração de bus e definições de pinos claras para alimentação e sinal.
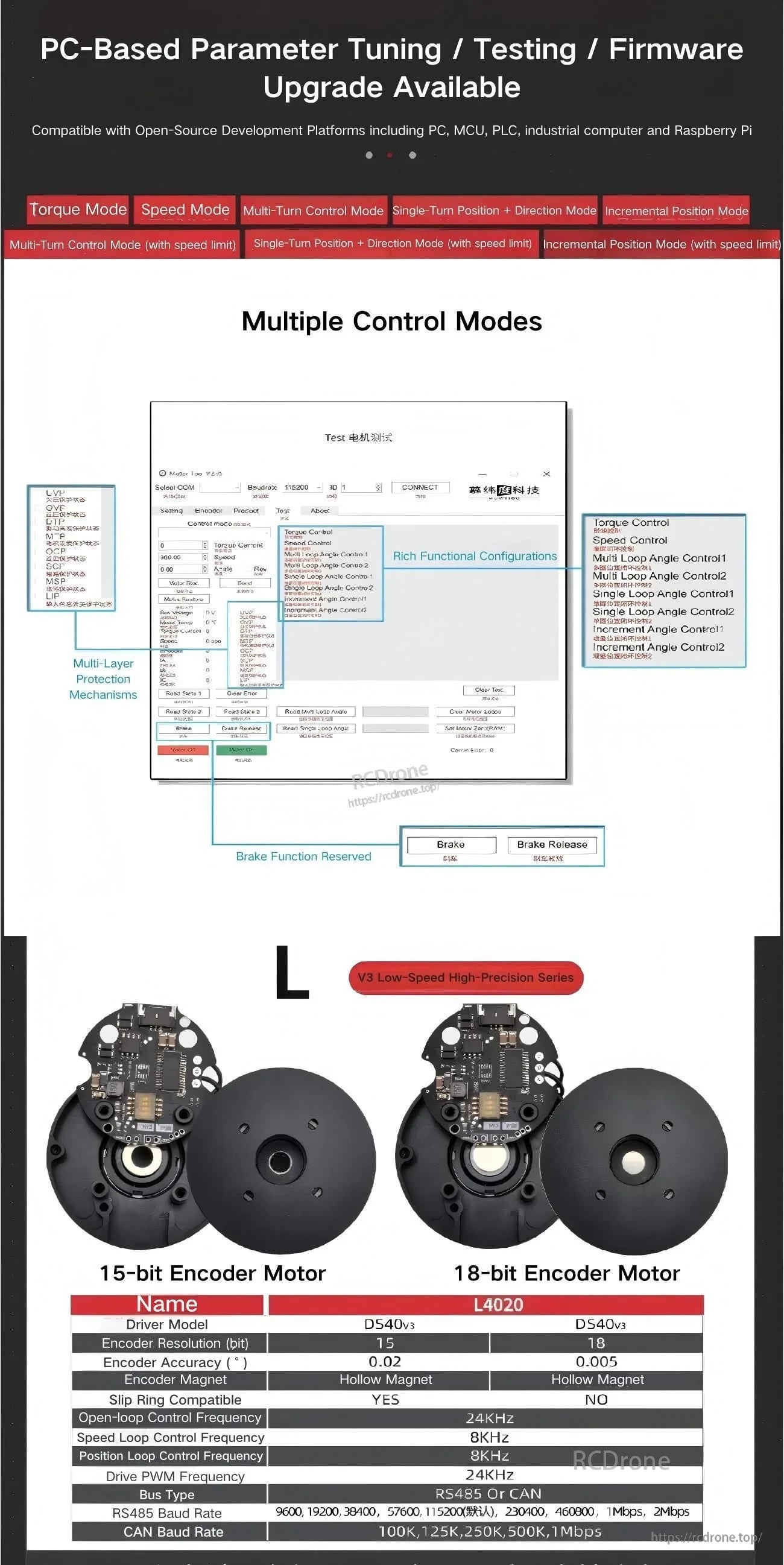
Ferramentas baseadas em PC permitem ajuste de parâmetros, testes e atualizações de firmware, com múltiplos modos de controlo disponíveis para diferentes tarefas de movimento.

Related Collections

