

Motor Brushless DC Servo MUWEIDU L4030 16V 160rpm 0.25N.m RS485/CAN Encoder 15/18 bits
Motor Brushless DC Servo MUWEIDU L4030 16V 160rpm 0.25N.m RS485/CAN Encoder 15/18 bits
MUWEIDU
Não foi possível carregar a disponibilidade de recolha
Visão Geral
MUWEIDU O Motor L4030 é um motor DC sem escovas de baixa velocidade e alta precisão motor servo com características de acionamento elétrico integradas para controle de velocidade/posição. Suporta comunicação RS485 ou CAN e é projetado para aplicações de movimento compactas e com espaço limitado que exigem operação estável e suave.
Características Principais
- Posicionamento da série: “Série de Motores DC Sem Escovas de Baixa Velocidade e Alta Precisão”
- Mini motores servo; design de eixo oco
- Operação estável & suave
- Certificado CE
- Alta precisão integrada
- Construção leve; alto desempenho de torque
- Atende aos requisitos de controle de posição de baixa velocidade e alta precisão
- MCU de alto desempenho de 32 bits permite que a Série MS seja totalmente compatível com todos os comandos de controle da Série MF
- Folhas de aço silício premium e ímãs permanentes de alto desempenho resistentes a altas temperaturas adotados como materiais principais do motor
- Design de rotor externo multiestágio achatado proporciona maior torque para aplicações com espaço restrito
- Estrutura sem escovas com rolamentos de alto desempenho para rotação mais suave e maior vida útil
- Resistores de liga de alta precisão e baixo desvio de temperatura para amostragem e controlo de corrente precisos
- Driver de ponte completa trifásica N-channel com baixa resistência interna e alta saída de corrente
- Suporta comutação sem interrupções entre modos de controlo de torque em malha aberta, velocidade e posição
- Calibração única; “posição zero nunca perdida”
Especificações Técnicas
| Modelo | L4030 |
| Tensão Nominal | 16V |
| Corrente Nominal | 1.1A |
| Pico de Potência | 5.5W |
| Torque Nominal | 0.25N.m |
| Torque de Pico | 0.35N.m |
| Velocidade Nominal | 160rpm |
| Encoder | 15bit ou 18bit |
| Inércia do Rotor | 105gcm^2 |
| Monitorização da Temperatura do Motor | SIM |
| Modos de Controlo | Velocidade/Posição |
| Protocolo de Comunicação | RS485 ou CAN |
| Dimensões Totais | Phi39.6mm x 33mm |
| Peso | 112g |
Definição da Interface
- COMUTADOR ID
- CAN/RS485
| Interface | Nota |
|---|---|
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Fonte de Alimentação Negativa |
| V- | Fonte de Alimentação Negativa |
| V+ | Fonte de Alimentação Positiva |
| V+ | Fonte de Alimentação Positiva |
| T | Transmissor UART |
| R | Receptor UART |
| G | GND de Sinal |
Cenários de Aplicação
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
- Câmara de 360 graus
- Câmara Portátil
- LiDAR
- Gimbal
Software para PC / Funções de Controlo (como indicado)
- Ajuste de Parâmetros / Testes / Atualização de Firmware Baseado em PC Disponível
- Compatível com plataformas de desenvolvimento de código aberto, incluindo PC, MCU, PLC, computador industrial e Raspberry Pi
- Múltiplos Modos de Controlo: Modo de Torque; Modo de Velocidade; Modo de Controlo Multi-Rotação; Modo de Posição + Direção de Rotação Única; Modo de Posição Incremental
- Com opções de limite de velocidade para: Modo de Controlo Multi-Rotação; Modo de Posição + Direção de Rotação Única; Modo de Posição Incremental
- Mecanismos de proteção em múltiplas camadas
- Função de travão reservada (Travão / Liberação do Travão)
Documentos
Para suporte técnico, questões de integração ou ajuda com documentação, contacte [email protected] or visite https://rcdrone.top/.
Detalhes

Plataforma de mini servo motor compacta projetada para movimento de baixa velocidade e alta precisão em espaços reduzidos.

Eletrónica de controlo integrada suporta um controlo de posição estável de baixa velocidade e alta precisão com materiais e design de motor eficientes.
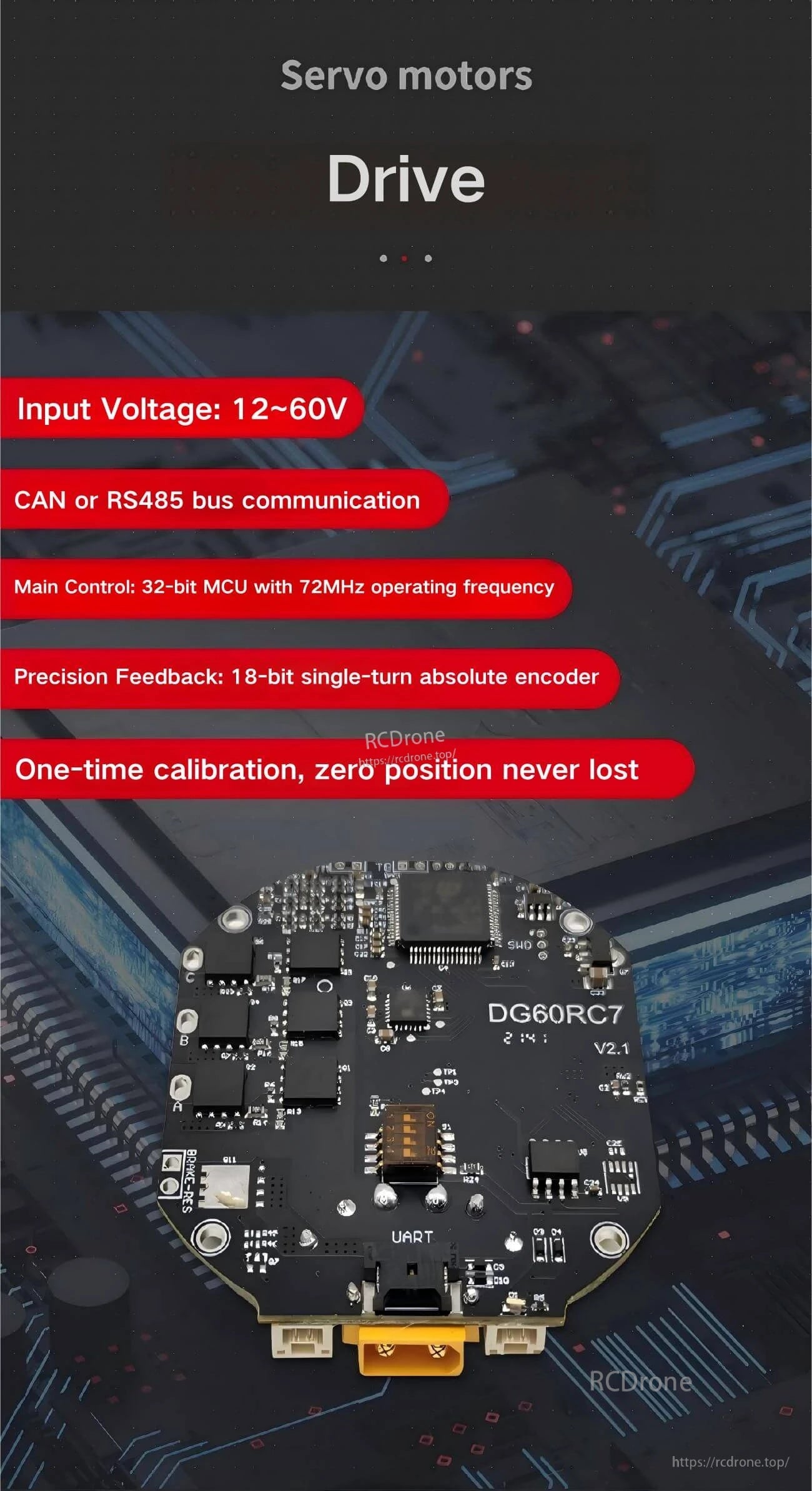
Escolha comunicação CAN ou RS485 e feedback de encoder absoluto para um controlo de velocidade e posição responsivo.

Rotulagem clara da interface simplifica a fiação para alimentação, linhas CAN/RS485 e conexões de sinal UART.
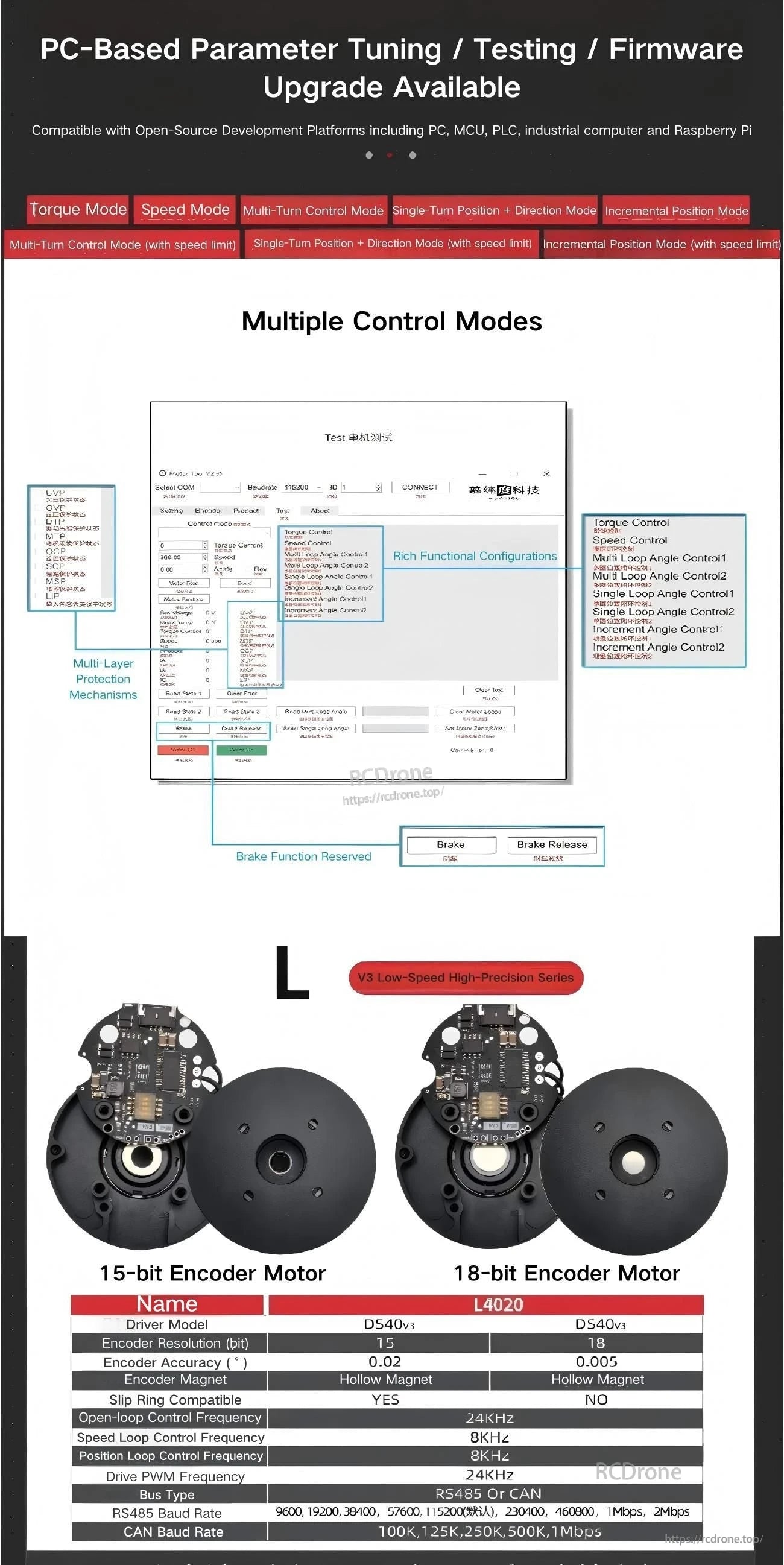
Ferramentas para PC permitem ajuste de parâmetros, testes e atualizações de firmware em múltiplos modos de controlo e configurações de encoder.

Related Collections

