

MUWEIDU L6020 Motor 24V 200rpm Motor Servo com Encoder de 18 bits, RS485/CAN, 0,58N.m Binário Nominal
MUWEIDU L6020 Motor 24V 200rpm Motor Servo com Encoder de 18 bits, RS485/CAN, 0,58N.m Binário Nominal
MUWEIDU
Não foi possível carregar a disponibilidade de recolha
Visão Geral
MUWEIDU O Motor L6020 é um motor CC sem escovas de baixa velocidade e alta precisão servo motor projetado para controle de velocidade/posição. Integra um codificador absoluto de 18 bits de uma volta e suporta comunicação CAN ou RS485 para sistemas de robótica e automação que requerem operação estável e suave. Para seleção de produtos ou suporte técnico, entre em contato [email protected] or visite https://rcdrone.top/.
Principais Características
- Série de motores DC sem escovas de alta precisão e baixa velocidade
- Design de eixo oco
- Operação estável & suave
- Alta precisão integrada; construção leve; desempenho de alto torque
- Atende aos requisitos de controle de posição de baixa velocidade e alta precisão
- Materiais do núcleo do motor: chapas de aço silício premium e ímãs permanentes de alto desempenho resistentes a altas temperaturas
- Design de rotor externo multiestágio achatado para maior torque em aplicações com espaço restrito
- Estrutura sem escovas combinada com rolamentos de alto desempenho para rotação mais suave e maior vida útil
- Resistores de liga de alta precisão e baixo desvio de temperatura para amostragem e controle de corrente precisos
- Driver de ponte completa de três fases N-channel com baixa resistência interna e alta saída de corrente
- Suporta a comutação sem interrupções entre os modos de controlo de torque em malha aberta, velocidade e posição
- Controlo principal: MCU de 32 bits com frequência de operação de 72 MHz
- Tensão de entrada: 12~60 V (motor)
- Calibração única, posição zero nunca perdida
- Certificado CE (conforme declarado)
Especificações
| Modelo | L6020 |
| Tensão Nominal | 24V |
| Corrente Nominal | 1.4A |
| Pico de Potência | 12.6W |
| Torque Nominal | 0.58N.m |
| Torque de Pico | 1.4N.m |
| Velocidade Avaliada | 200rpm |
| Encoder | 18bit |
| Inércia do Rotor | 394gcm² |
| Monitorização da Temperatura do Motor | SIM |
| Modos de Controlo | Velocidade/Posição |
| Protocolo de Comunicação | RS485 ou CAN |
| Dimensões Gerais | Φ58mm×21mm |
| Peso | 185g |
Definição da Interface
- COMUTADOR DE ID
- CAN/RS485
- B/L: RS485-B ou CAN-L
- A/H: RS485-A ou CAN-H
- V-: Fonte de Alimentação Negativa
- V+: Fonte de Alimentação Positiva
- T: Transmissor UART
- R: Receptor UART
- G: GND de Sinal
Cenários de Aplicação
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
- Câmara 360°
- Câmara Portátil
- LiDAR
- Gimbal
Software para PC / Modos de Controlo (conforme indicado)
Ajuste de parâmetros / testes / atualização de firmware baseado em PC disponível.Compatível com plataformas de desenvolvimento de código aberto, incluindo PC, MCU, PLC, computador industrial e Raspberry Pi.
- Modo de Torque
- Modo de Velocidade
- Modo de Controlo Multi-Rotação
- Modo de Posição + Direção de Rotação Única
- Modo de Posição Incremental
- Modo de Controlo Multi-Rotação (com limite de velocidade)
- Modo de Posição + Direção de Rotação Única (com limite de velocidade)
- Modo de Posição Incremental (com limite de velocidade)
Manuais / Ficheiros
Detalhes

Projetado para controlo de movimento de baixa velocidade e alta precisão com um formato compacto de eixo oco.

A construção central foca na rotação suave e no controlo preciso da corrente para um desempenho de posicionamento estável.
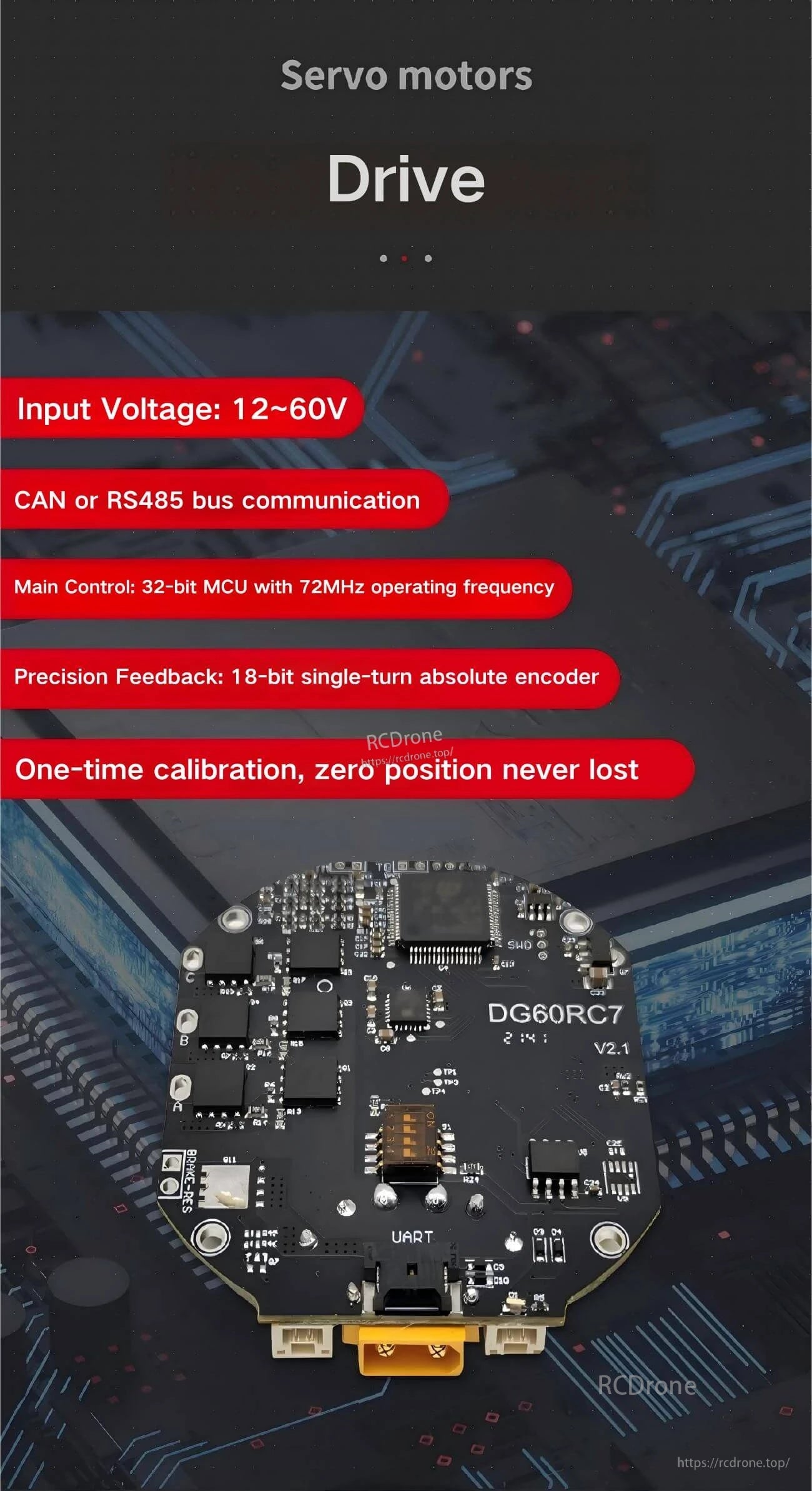
Eletrónica de controlo integrada suporta controlo de barramento CAN ou RS485 com feedback de codificador absoluto de 18 bits.

Rotulagem clara da interface ajuda a ligar corretamente as conexões de energia, UART e CAN/RS485.
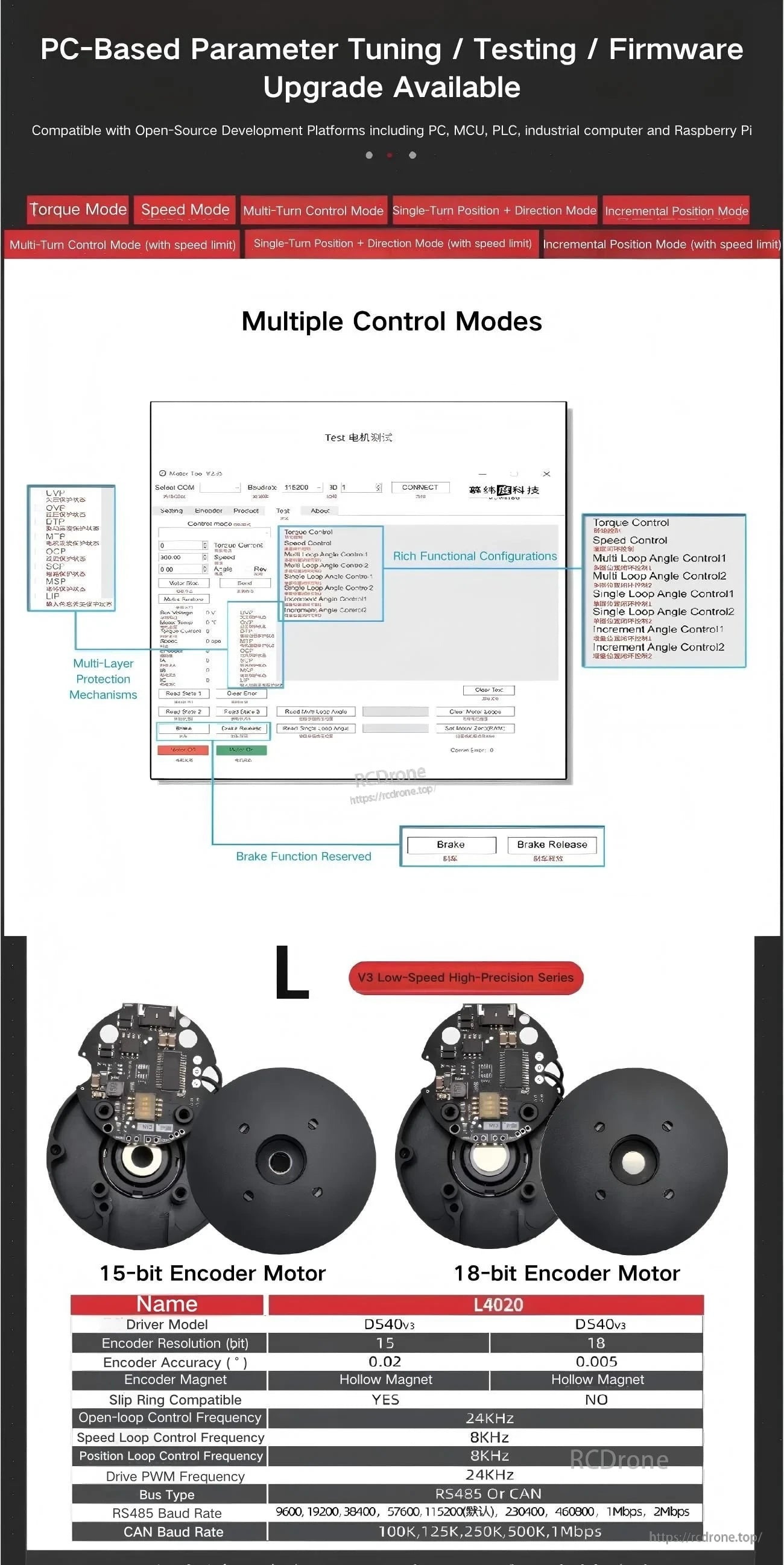
Software para PC permite ajuste de parâmetros, testes e atualizações de firmware em modos de controlo de torque, velocidade e posição.
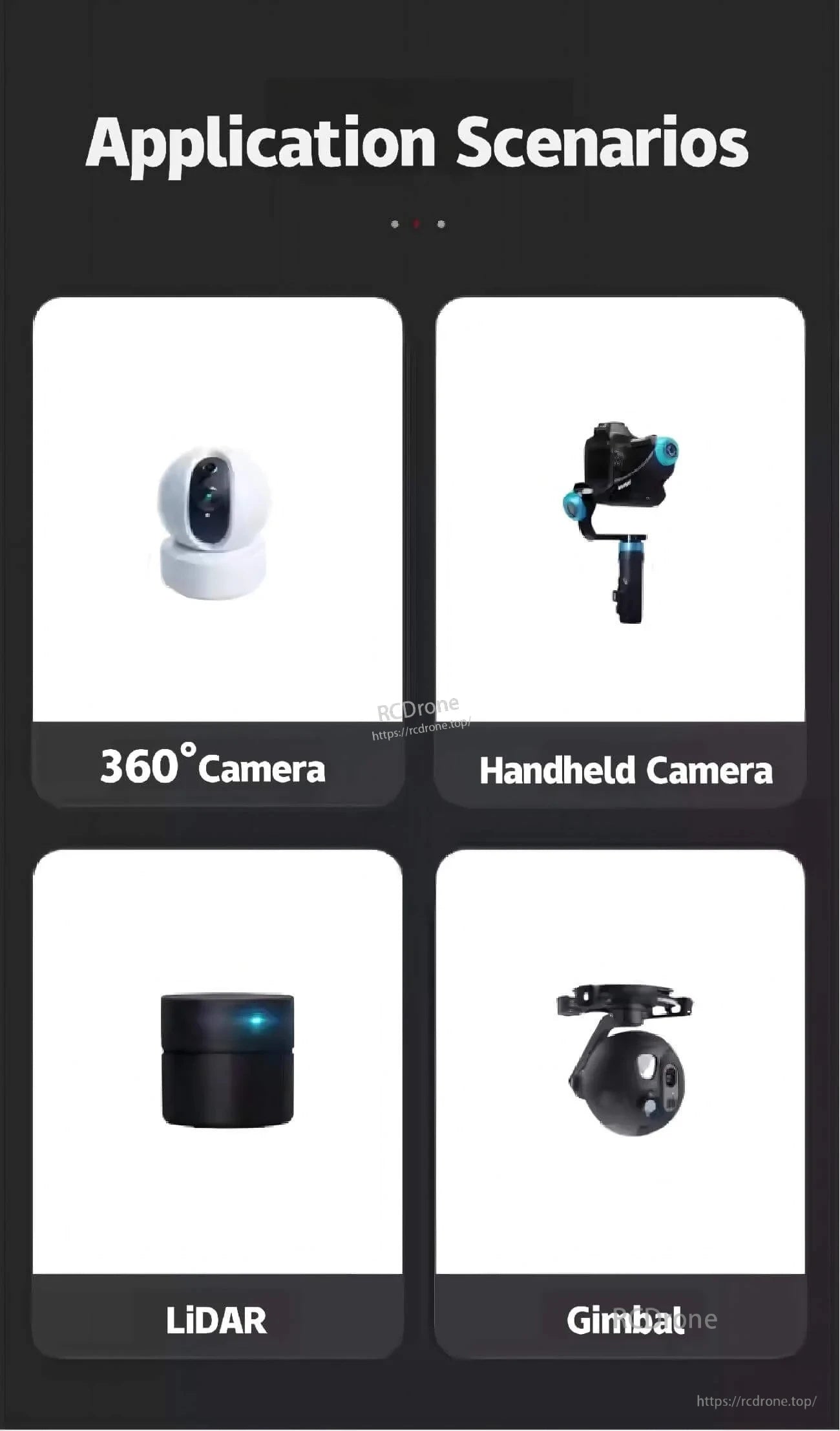
Uma solução prática para construções mecatrónicas compactas, como gimbals, câmaras de 360° e módulos LiDAR.
Related Collections

