

MUWEIDU TS6013-36 24V Motor Compacto com Redutor Servo 1:36 RS485/CAN Encoder Absoluto de 18 bits
MUWEIDU TS6013-36 24V Motor Compacto com Redutor Servo 1:36 RS485/CAN Encoder Absoluto de 18 bits
MUWEIDU
Não foi possível carregar a disponibilidade de recolha
Visão Geral
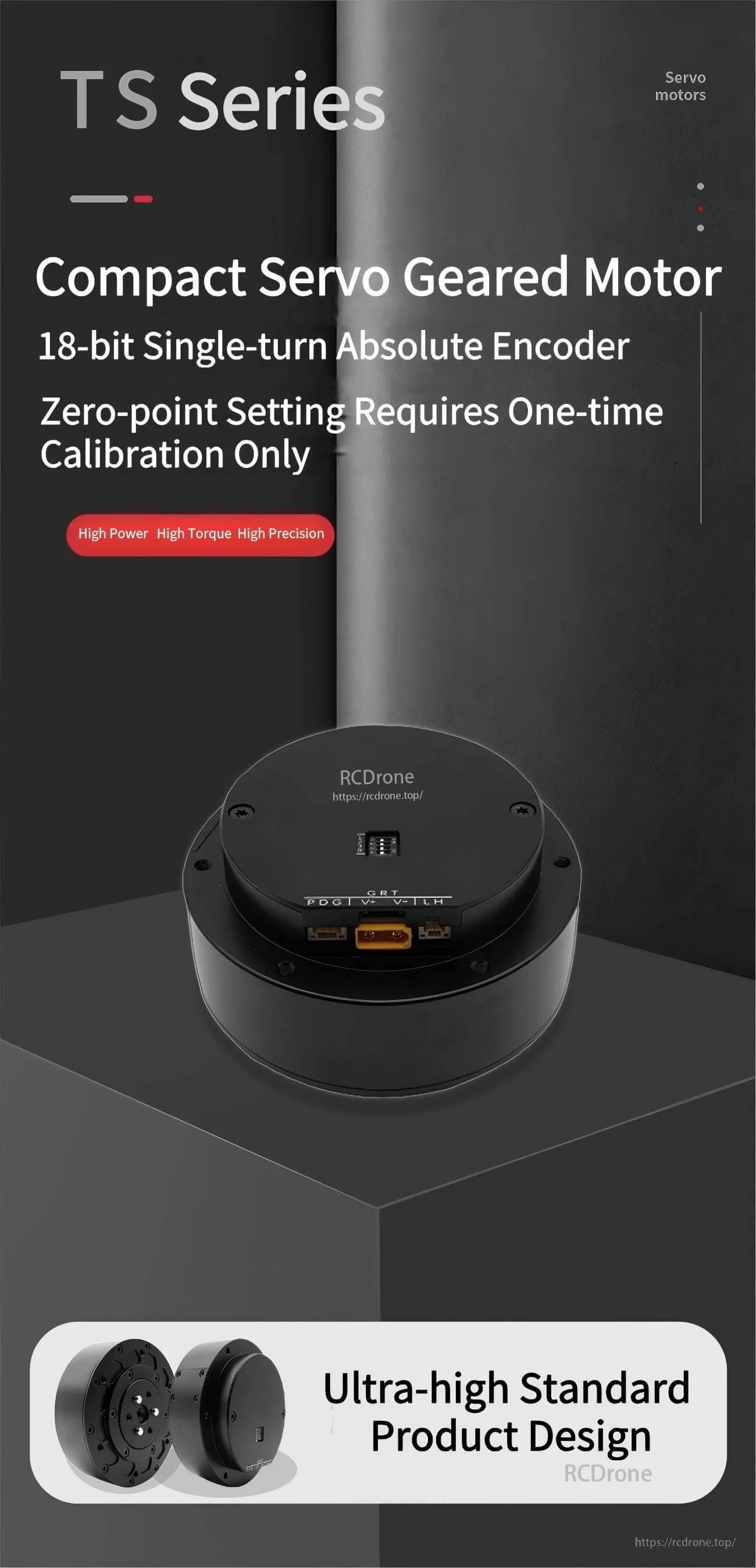
MUWEIDU O Motor TS6013-36 é um motor de servo compacto com redutor (motores de servo da série TS) projetado como um sistema de acionamento elétrico integrado para robótica e automação. Possui um codificador absoluto de 18 bits de uma volta e suporta a definição de ponto zero com calibração única. Os modos de controlo incluem torque, velocidade e posição, com comunicação RS485/CAN.
Características Principais
- Motor de servo compacto com redutor (Motores de servo da série TS)
- Encoder absoluto de 18 bits de uma volta
- A calibração do ponto zero requer apenas uma calibração única
- Arquitetura de sistema de acionamento elétrico integrado
- Motor sem escovas de alta potência + redutor planetário de alta precisão + acionamento FOC de alto desempenho
- Modos de controlo: Torque/Velocidade/Posição
- Protocolo de comunicação: RS485/CAN
Especificações
| Modelo | TS6013-36 |
| Tensão Nominal | 24V |
| Corrente Nominal | 4.4A |
| Pico de Potência | 160W |
| Torque Nominal | 13N.m |
| Torque de Pico | 25N.m |
| Velocidade Avaliada | 54rpm |
| Encoder | 18bit + 14bit |
| Inércia do Rotor | 850gcm^2 |
| Relação de Redução | 1:36 |
| Modos de Controlo | Torque/Velocidade/Posição |
| Protocolo de Comunicação | RS485/CAN |
| Dimensões Gerais | Φ63mm×54.5mm |
| Dimensões Gerais (com travão) | Φ53mm×59mm |
| Peso | 460g |
| Peso (com travão) | 560g |
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes / robôs com pernas
- Veículos AGV
- Robôs ARU
- Robôs industriais
- Veículos robóticos de inspeção
- Robôs médicos
Manuais / Downloads
- MUWEIDU_TS6013-36_Motor.STP
- MUWEIDU_TS6013-36_Diagrama_de_estrutura_do_produto.pdf
- MUWEIDU_TS6013-36B_Diagrama_de_estrutura_do_produto.pdf
Para suporte em fiação, integração ou seleção de modelos, contacte [email protected] or visite https://rcdrone.top/.
Detalhes
Um motor de passo integrado da série TS combina um tamanho compacto com um encoder absoluto de 18 bits para posicionamento estável e repetível.
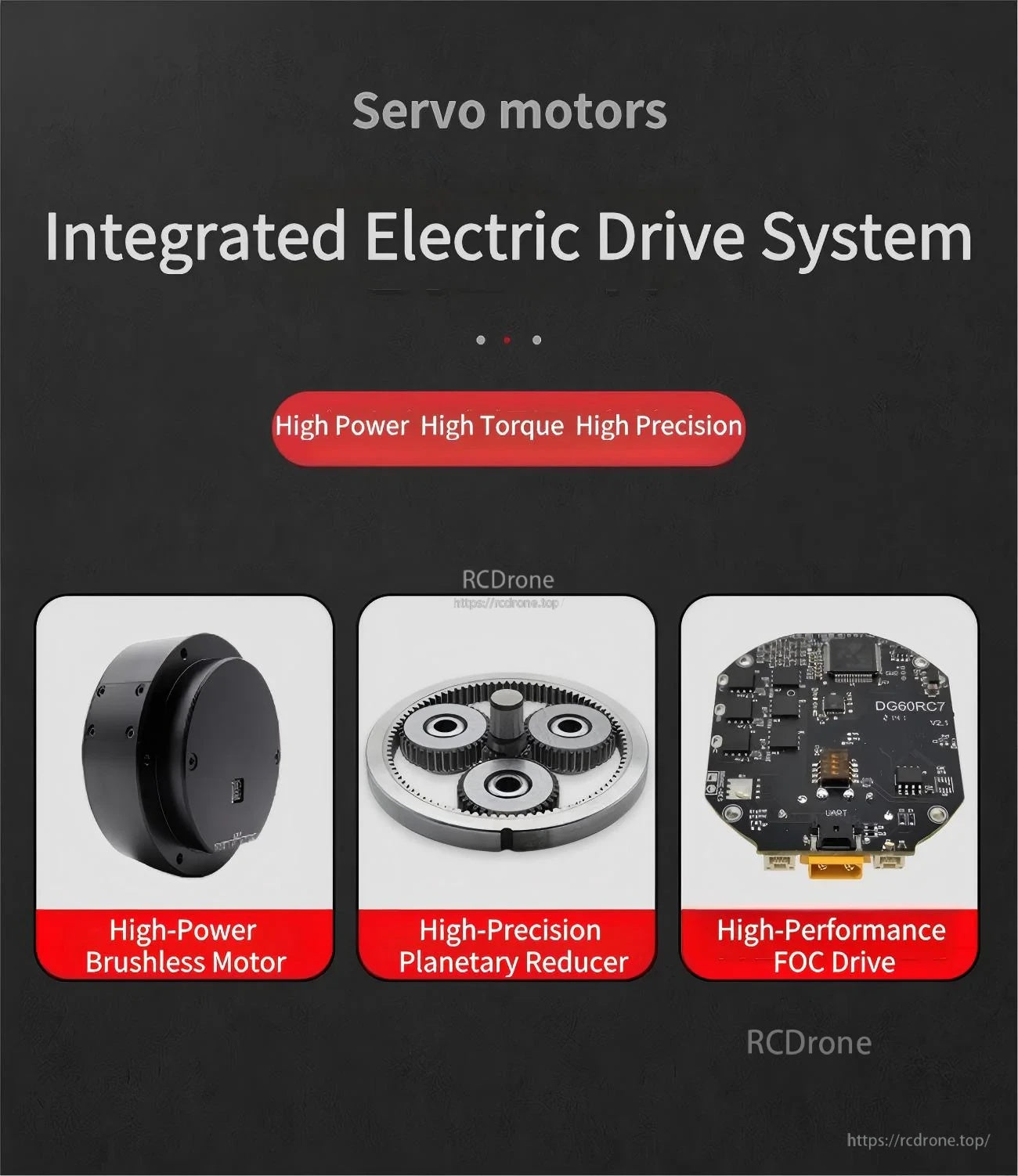
Motor sem escovas, caixa de engrenagens planetária e eletrónica de controlo FOC estão integrados numa única unidade de acionamento para simplificar o design das articulações do robô.

Related Collections

