

MUWEIDU ZH5030 Motor de Acionamento Elétrico Integrado 16V RS485/CAN Encoder de 19 bits para Robótica
MUWEIDU ZH5030 Motor de Acionamento Elétrico Integrado 16V RS485/CAN Encoder de 19 bits para Robótica
MUWEIDU
Não foi possível carregar a disponibilidade de recolha
Visão Geral
MUWEIDU ZH5030 é um motor de sistema de acionamento elétrico integrado, projetado para controle de posição de baixa velocidade e alta precisão. Suporta modos de controle de torque/velocidade/posição e fornece comunicação RS485 ou CAN para integração em robótica e automação.
Principais Características
- MCU de alto desempenho de 32 bits: Série MS totalmente compatível com todos os comandos de controle da Série MF.
- Atende aos requisitos de controle de posição de baixa velocidade e alta precisão.
- Folhas de aço silício premium e ímãs permanentes de alto desempenho resistentes a altas temperaturas utilizados como materiais principais do motor.
- Design de rotor externo multiestágio achatado que proporciona maior torque para aplicações com espaço limitado.
- Estrutura sem escovas combinada com rolamentos de alto desempenho para uma rotação mais suave e maior vida útil.
- Resistores de liga de alta precisão e baixo desvio de temperatura para amostragem e controle de corrente precisos.
- Condução completa em ponte completa trifásica N-channel com baixa resistência interna e alta saída de corrente.
- Suporta comutação sem interrupções entre modos de controle de torque em malha aberta, velocidade e posição.
- Ajuste de parâmetros / teste / atualização de firmware baseado em PC disponível; compatível com plataformas de desenvolvimento de código aberto, incluindo PC, MCU, PLC, computador industrial e Raspberry Pi.
Especificações Técnicas
| Modelo | ZH5030 |
| Tensão Nominal | 16V |
| Corrente Nominal | 1.35A |
| Poder de Pico | 12W |
| Torque Nominal | 0.24 N.m |
| Torque de Pico | 0.53 N.m |
| Velocidade Avaliada | 440 rpm |
| Encoder | 19 bits |
| Inércia do Rotor | 202 gcm^2 |
| Monitorização da Temperatura do Motor | SIM |
| Modos de Controlo | Torque / Velocidade / Posição |
| Protocolo de Comunicação | RS485 ou CAN |
| Dimensões Gerais | Diâmetro 49 mm x 28.9 mm |
| Peso | 145 g |
Definição da Interface
- Interruptor de ID: ID SWITCH
- Conector de comunicação: CAN/RS485
| Interface | Nota |
|---|---|
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Fonte de alimentação negativa |
| V- | Fonte de alimentação negativa |
| V+ | Fonte de alimentação positiva |
| V+ | Fonte de alimentação positiva |
| T | Transmissor UART |
| R | Receptor UART |
| G | GND de sinal |
Cenários de Aplicação
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
- Câmara 360°
- Câmara portátil
- LiDAR
- Gimbal de pod
Para orientação de integração e suporte de pedidos, contacte [email protected] or visite https://rcdrone.top/ .
Manuais / Documentos
Detalhes

Projetado para movimento de baixa velocidade e alta precisão, o ZH5030 combina um motor sem escovas e eletrónica de controlo numa unidade compacta.

Etiquetagem clara dos pinos e um interruptor de ID a bordo ajudam a simplificar a fiação multi-nó RS485 ou CAN durante a integração.
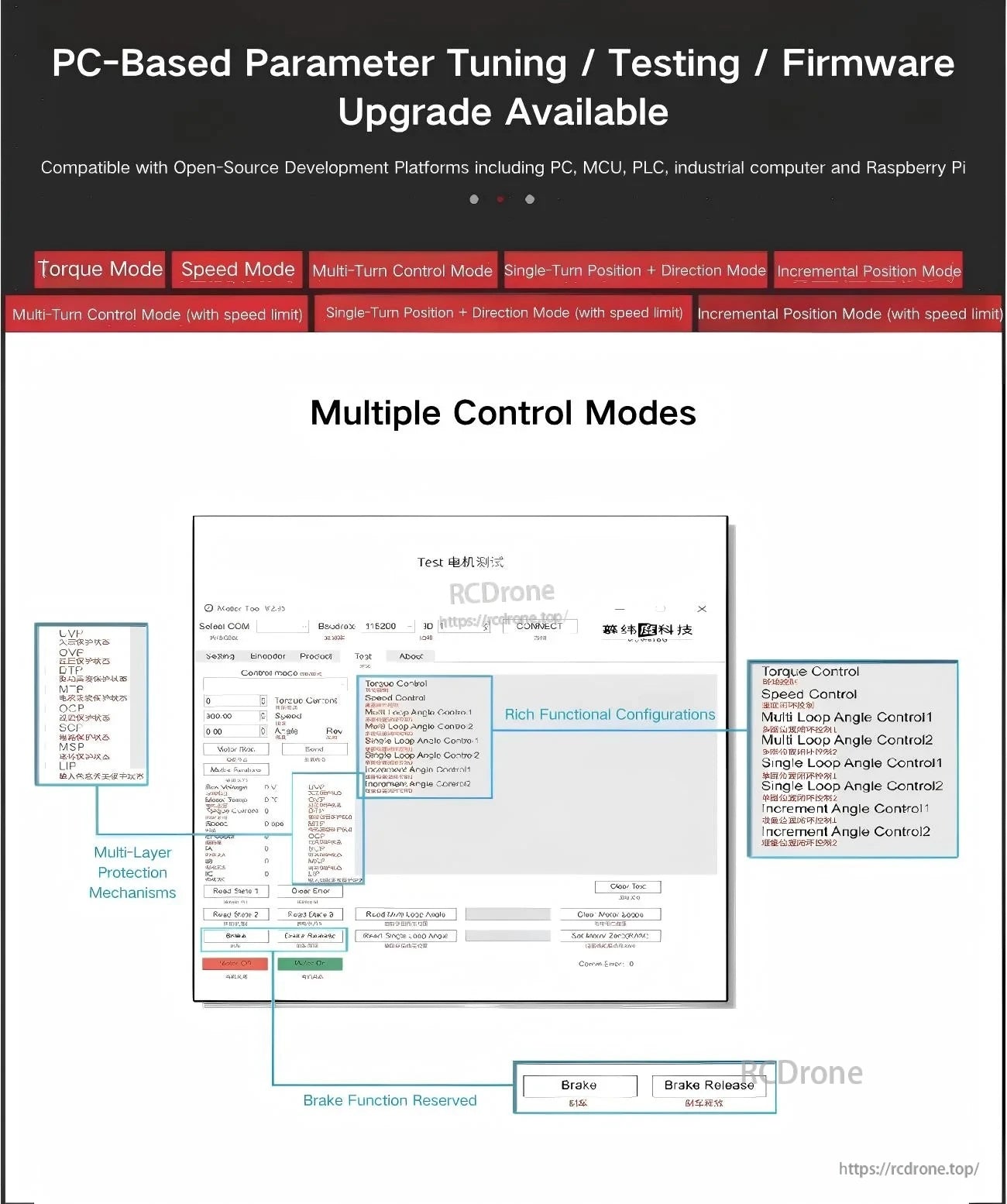
Ferramentas baseadas em PC suportam ajuste de parâmetros, testes e atualizações de firmware, com modos de controlo de torque, velocidade e posição selecionáveis.

Related Collections

