







MyActuator RH-17 Atuador Harmónico Oco – 54N·m Binário Máx., Redução 100:1, EtherCAT & CAN BUS, Encoder Duplo ABS-17BIT
MyActuator RH-17 Atuador Harmónico Oco – 54N·m Binário Máx., Redução 100:1, EtherCAT & CAN BUS, Encoder Duplo ABS-17BIT
MyActuator
Não foi possível carregar a disponibilidade de recolha
Overview
O Motor de Junta Robótica Harmónica Oca MyActuator RH-17 é um atuador de alto desempenho projetado para aplicações robóticas avançadas. Com uma relação de transmissão de 100:1, torque de pico de 54 N·m e torque nominal de 35 N·m, garante uma operação precisa, estável e poderosa. Apresentando comunicação EtherCAT e CAN BUS, um sistema de encoder dual ABS-17BIT e rolamentos de rolos cruzados, este motor proporciona uma precisão de controlo e durabilidade excepcionais. O seu design oco compacto (Ø80 mm × 90.2 mm) e peso de 1.11 kg tornam-no ideal para braços robóticos, robôs colaborativos e sistemas de automação que exigem alta densidade de torque e controlo de movimento preciso.
Principais Características
-
Alto Torque & Potência: Torque nominal de 35 N·m e torque de pico de 54 N·m para aplicações exigentes.
-
Comunicação Dual: Suporta protocolos EtherCAT e CAN BUS para uma integração sem falhas e resposta rápida.
-
Controlo de Precisão: Dual encoders ABS-17BIT para entrada e saída proporcionam posicionamento preciso com <0.01° de repetibilidade.
-
Compacto & Leve: Design de eixo oco com apenas 1.11 kg de peso, otimizado para alta densidade de torque.
-
Construção Robusta: Equipado com rolamentos de rolos cruzados para maior capacidade de carga e durabilidade.
-
Confiabilidade de Grau Industrial: Classe de isolamento F, MCU de alta velocidade e dissipação de calor otimizada para desempenho estável a longo prazo.
Parâmetros do Produto
| Parâmetro | Valor |
|---|---|
| Relação de Transmissão | 100:1 |
| Tensão de Entrada | 48 V |
| Velocidade Sem Carga | 30 RPM |
| Corrente Sem Carga | 0.6 A |
| Velocidade Nominal | 25 RPM |
| Torque Nominal | 35 N·m |
| Potência Nominal | 91 W |
| Corrente Nominal | 4.7 A (rms) |
| Torque de Pico | 54 N·m |
| Corrente de Pico | 7.4 A (rms) |
| Constante de Back-EMF | 19.2 Vdc/Krpm |
| Constante de Torque do Módulo | 7.4 N·m/A |
| Resistência da Fase do Motor | 0.70 Ω |
| Indutância da Fase do Motor | 0.47 mH |
| Pares de Polos | 10 |
| Folga | <40 Arcsec |
| Carga Radial | Estática: 16.3 kN / Dinâmica: 10.4 kN |
| Carga Axial | Estática: 78.2 kN / Dinâmica: 20.8 kN |
| Inércia | N: 0.52 kg·m² / B: 0.56 kg·m² |
| Precisão de Repetição de Posição | <0.01° |
| Comunicação | CAN BUS & EtherCAT |
| Peso | Liquido: 1.11 kg / Embalado: 1.28 kg |
| Classe de Isolamento | F |
Tipo de Encoder
-
Encoder de Entrada: ABS-17BIT
-
Encoder de Saída: ABS-17BIT
-
Fornece feedback de movimento preciso para uma maior precisão de controlo.
Instalação & Dimensões
-
Tamanho: Ø80 mm × 90.2 mm
-
Montagem: Múltiplos furos passantes e interfaces roscadas para uma instalação segura.
-
Eixo Oco: Otimizado para roteamento de cabos em braços robóticos e sistemas de automação.
Interface & Fiação
-
Portas EtherCAT: Terminais IN e OUT para encadeamento de rede.
-
Portas CAN BUS: CAN_H e CAN_L para comunicação.
-
Terminais de Alimentação: Conectores XT30 para entrega de energia fiável.
-
Conexões Auxiliares: Interfaces de bateria de memória e resistor de descarga para configurações de controlo avançadas.
Conteúdo da Embalagem
-
Atuador: MyActuator Motor de Junta Harmónica Oca RH-17 ×1
-
A. Cabo de Alimentação ×2
-
B. Cabo de Comunicação CAN BUS ×4
-
C. 120Ω Resistência do Terminal ×1
-
Cabo de Comunicação D. EtherCAT ×2
-
Módulo de Comunicação E. CAN BUS ×1 (Adaptador USB-CAN gratuito incluído por encomenda)
Aplicações
-
Braços robóticos colaborativos
-
Sistemas de automação industrial
-
Robôs humanoides e quadrúpedes
-
Plataformas de movimento de precisão
-
Juntas robóticas autónomas para investigação e desenvolvimento
Detalhes

O motor do robô RH-17 oferece encoder duplo, CAN BUS & EtherCAT, relação de engrenagem 100:1, 48V, 35 N.m torque, 91W de potência. Disponível com/sem travão. Inclui desenhos e parâmetros.
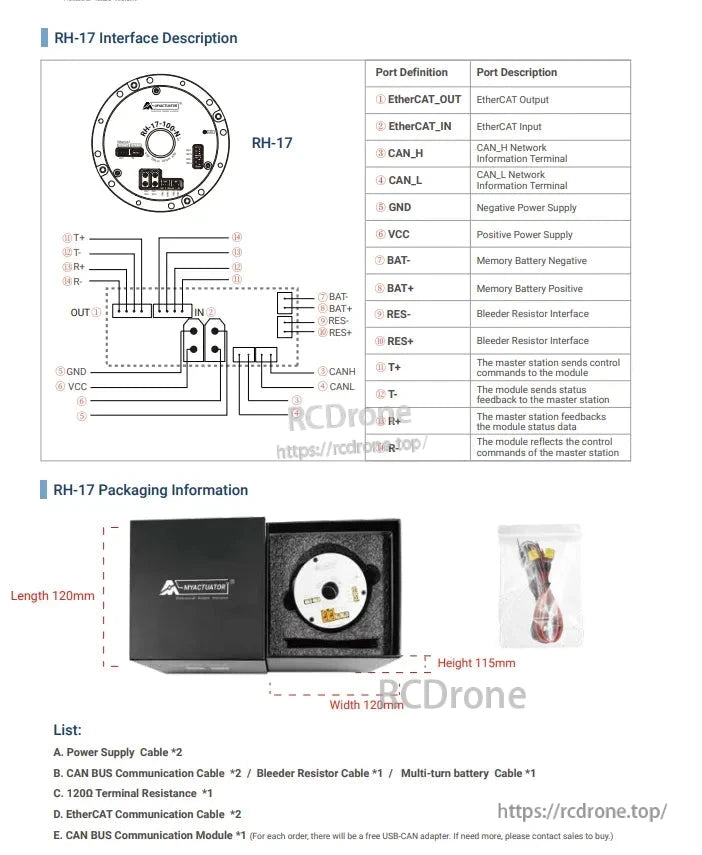
A interface RH-17 inclui conexões EtherCAT, CAN bus, de energia e de bateria. A embalagem contém cabos, resistores e um módulo. Dimensões: 120×120×115mm. A lista inclui cabos de energia, CAN, EtherCAT, resistência e módulo de comunicação.
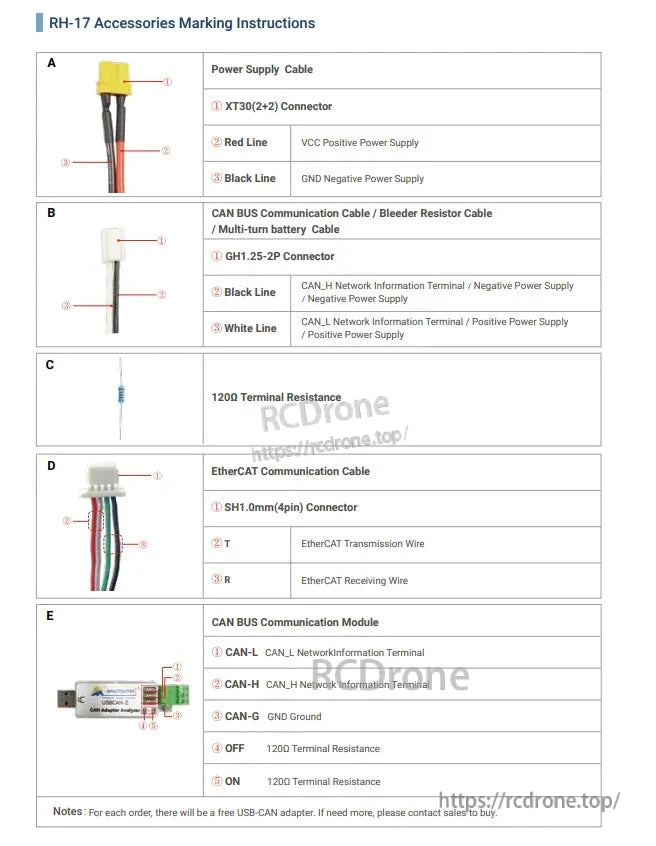
Os acessórios RH-17 incluem cabos de energia, CAN BUS, EtherCAT, resistência de 120Ω e módulo de comunicação. Os detalhes abrangem conectores, cores dos fios, funções e resistências terminais para cada componente. Adaptador USB-CAN incluído com o pedido.
Related Collections







