





MyActuator RH-20 Atuador Harmónico para Robô, Relação de Engrenagem 100:1, Binário Máx. 80N·m, EtherCAT & CAN Bus, Encoder Duplo de 17 Bits
MyActuator RH-20 Atuador Harmónico para Robô, Relação de Engrenagem 100:1, Binário Máx. 80N·m, EtherCAT & CAN Bus, Encoder Duplo de 17 Bits
MyActuator
Não foi possível carregar a disponibilidade de recolha
Visão Geral
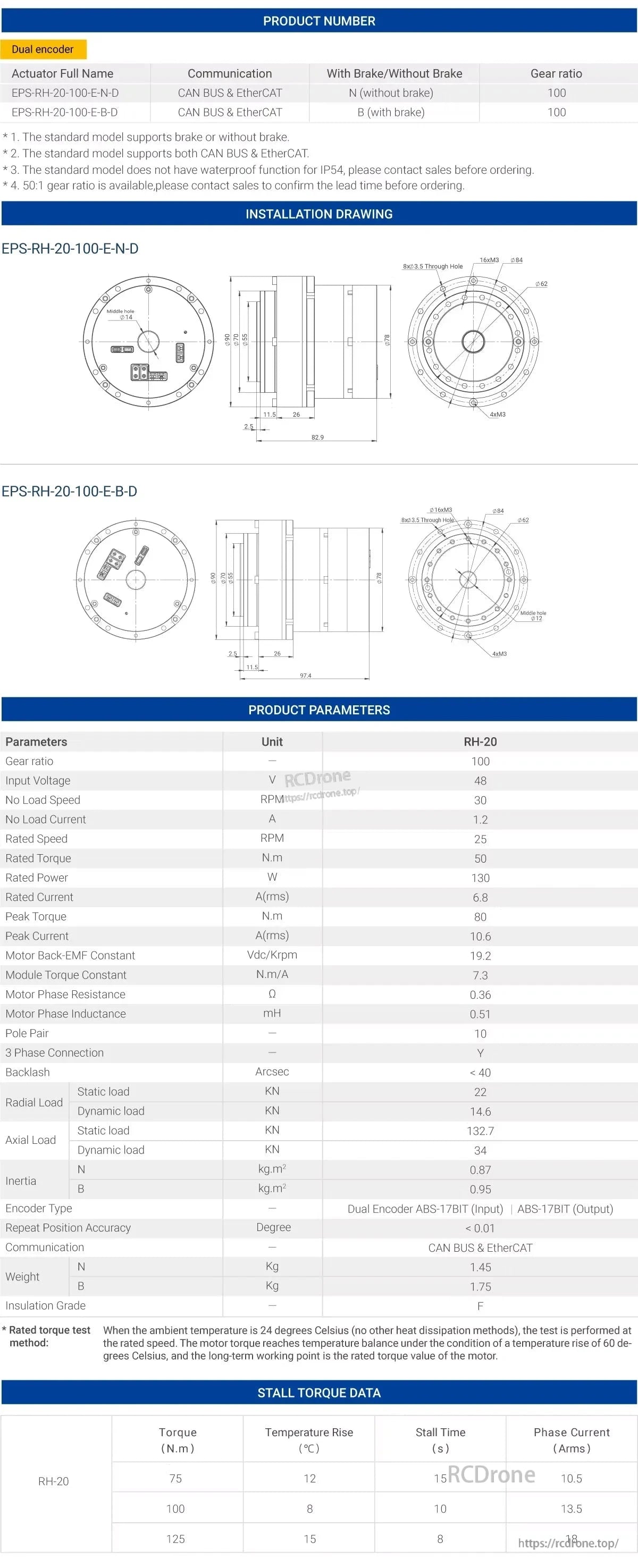
O Motor de Juntas Harmónicas MyActuator RH-20 é um atuador de transmissão harmónica de alto desempenho, projetado para juntas robóticas, automação industrial e sistemas de movimento de precisão. Com uma relação de transmissão de 100:1, torque de pico de 80N·m, torque nominal de 50N·m e potência nominal de 130W, este atuador oferece um desempenho poderoso, estável e eficiente em um formato compacto.
Equipado com protocolos de comunicação EtherCAT e CAN Bus e encoders absolutos duplos de 17 bits, o RH-20 garante uma precisão excepcional de repetição de posicionamento (<0.01°), tornando-o ideal para robôs humanoides, braços robóticos colaborativos, robôs móveis e outras aplicações de precisão.
Principais Características
-
Alta Saída de Potência – torque nominal de 50N·m, torque de pico de 80N·m e potência nominal de 130W para aplicações de alta carga.
-
Controlo de Precisão – Encoders ABS de 17 bits em dupla oferecem uma precisão de posicionamento repetido de menos de 0,01°.
-
Comunicação Avançada – Suporta EtherCAT e CAN Bus para controlo em tempo real rápido e fiável.
-
Proteção Fiável – Isolamento de classe F garante operação segura e estável durante o uso contínuo em alta carga.
-
Design Compacto – Diâmetro de 90mm, altura de 97,4mm e apenas 1,75kg de peso para uma integração perfeita em sistemas multi-eixos.
-
Rolamentos Duráveis – Rolamentos de rolos cruzados para alta capacidade de carga radial e axial e longa vida útil.
Especificações Técnicas
Desempenho do Motor
| Parâmetro | Unidade | Valor |
|---|---|---|
| Relação de Transmissão | – | 100 |
| Tensão de Entrada | V | 48 |
| Velocidade sem Carga | RPM | 30 |
| Corrente sem Carga | A | 1.2 |
| Velocidade Nominal | RPM | 25 |
| Torque Nominal | N·m | 50 |
| Potência Nominal | W | 130 |
| Corrente Nominal | A (rms) | 6.8 |
| Torque de Pico | N·m | 80 |
| Corrente de Pico | A (rms) | 10.6 |
| Constante de Back-EMF do Motor | Vdc/Krpm | 19.2 |
| Constante de Torque do Módulo | N·m/A | 7.3 |
| Resistência de Fase do Motor | Ω | 0.36 |
| Indutância de Fase do Motor | mH | 0.51 |
| Pares de Polos | – | 10 |
| Conexão Trifásica | – | Y |
| Folga | Arcsec | <40 |
Carga & Inércia
| Parâmetro | Unidade | Valor |
|---|---|---|
| Carga Radial (Estática/Dinâmica) | KN | 22 / 14.6 |
| Carga Axial (Estática/Dinâmica) | KN | 132.7 / 34 |
| Inércia (N/B) | kg·m² | 0.87 / 0.95 |
| Peso (N/B) | Kg | 1.45 / 1.75 |
| Tipo de Encoder | – | Dual ABS-17BIT (Entrada) / ABS-17BIT (Saída) |
| Precisão de Repetição de Posição | Grau | <0.01 |
| Comunicação | – | EtherCAT & CAN Bus |
| Grau de Isolamento | – | F |
Dados de Torque de Estacionamento
| Torque (N·m) | Aumento de Temperatura (°C) | Tempo de Estacionamento (s) | Corrente de Fase (A rms) |
|---|---|---|---|
| 75 | 12 | 15 | 10.5 |
| 100 | 8 | 10 | 13.5 |
| 125 | 15 | 8 | 18 |
Interface e Pinout
-
EtherCAT_IN / EtherCAT_OUT – Portas de comunicação de alta velocidade
-
CAN_H / CAN_L – Terminais da rede CAN Bus
-
VCC / GND – Fonte de alimentação positiva e negativa
-
RES+ / RES- – Interface do resistor de descarga
-
BAT+ / BAT- – Conexão da bateria de memória multi-volta
-
T+, T-, R+, R- – Comunicação mestre-escravo e feedback de estado
Conteúdo da Embalagem
-
Cabo de Alimentação ×2
-
Cabo de Comunicação CAN Bus ×4
Resistor de Bleeder Cabo ×1
-
Cabo de Bateria Multi-voltas ×1
-
Resistência de Terminal de 120Ω ×1
-
Cabo de Comunicação EtherCAT ×2
-
Módulo de Comunicação CAN Bus ×1 (Adaptador USB-CAN)
Aplicações
-
Juntas de robôs humanoides
-
Braços robóticos colaborativos
-
Robôs móveis e sistemas de acionamento AGV
-
Plataformas de posicionamento de precisão
-
Equipamentos de inspeção automatizada e de laboratório
Detalhes
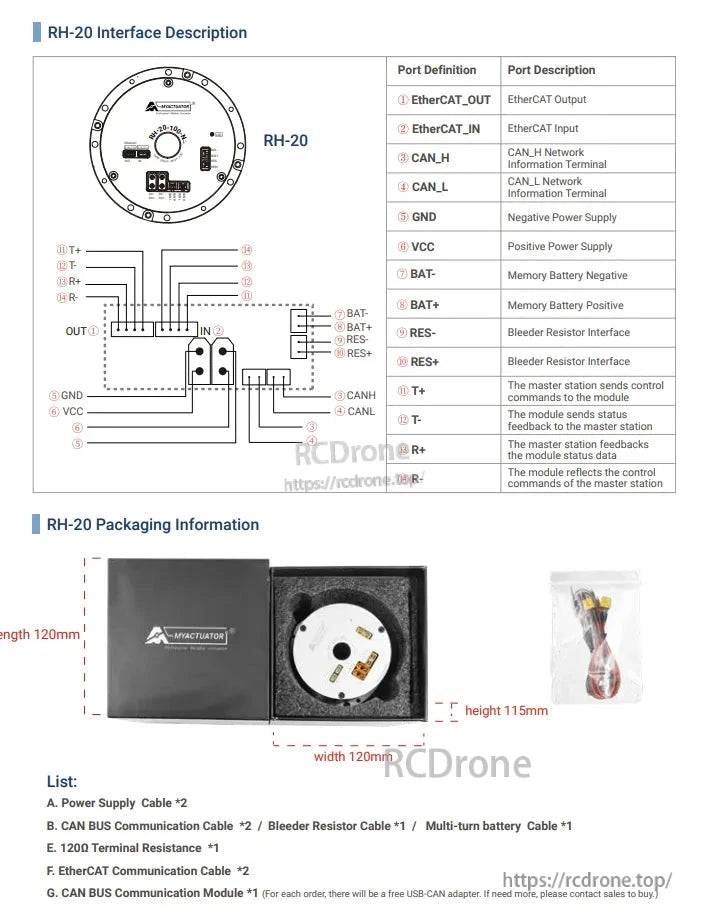
A interface do Motor Harmónico possui conexões EtherCAT, CAN bus, de energia e de bateria. Embalagem: 120x120x115mm. Inclui cabos, resistores e módulos de comunicação para configuração.
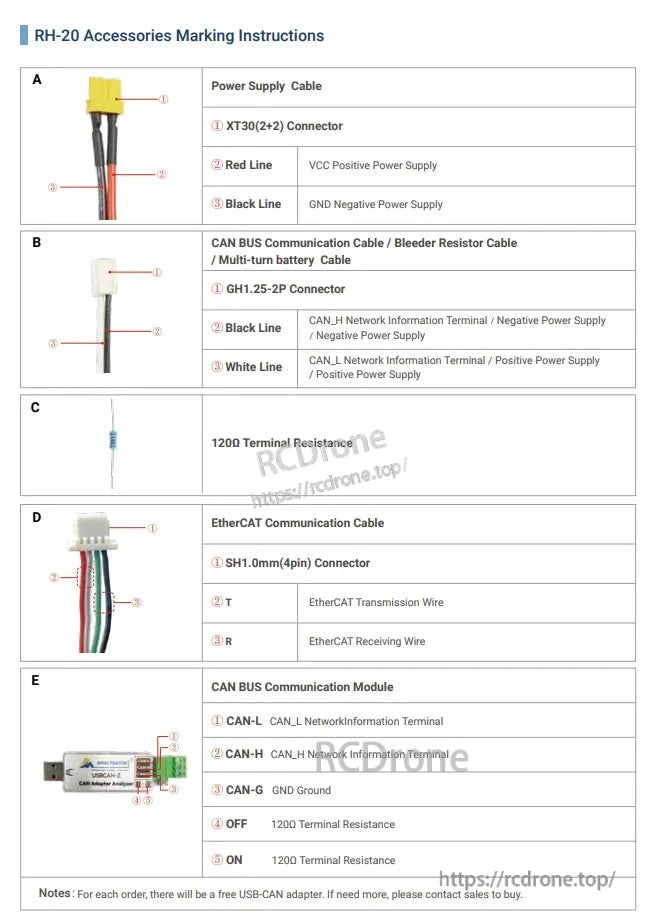
Os acessórios RH-20 incluem instruções de marcação para cabos de energia, CAN BUS, EtherCAT e módulo de comunicação. Os detalhes abrangem tipos de conectores, cores de fios, funções e resistência de terminais. Cada encomenda inclui um adaptador USB-CAN gratuito.
Related Collections





