






Módulo de Junta Robótica Harmónica Oca MyActuator RH-32, 48V, 229Nm Pico de Binário, Dois Codificadores de 17 Bits, CAN BUS & Controlo EtherCAT
Módulo de Junta Robótica Harmónica Oca MyActuator RH-32, 48V, 229Nm Pico de Binário, Dois Codificadores de 17 Bits, CAN BUS & Controlo EtherCAT
MyActuator
Não foi possível carregar a disponibilidade de recolha
Visão Geral
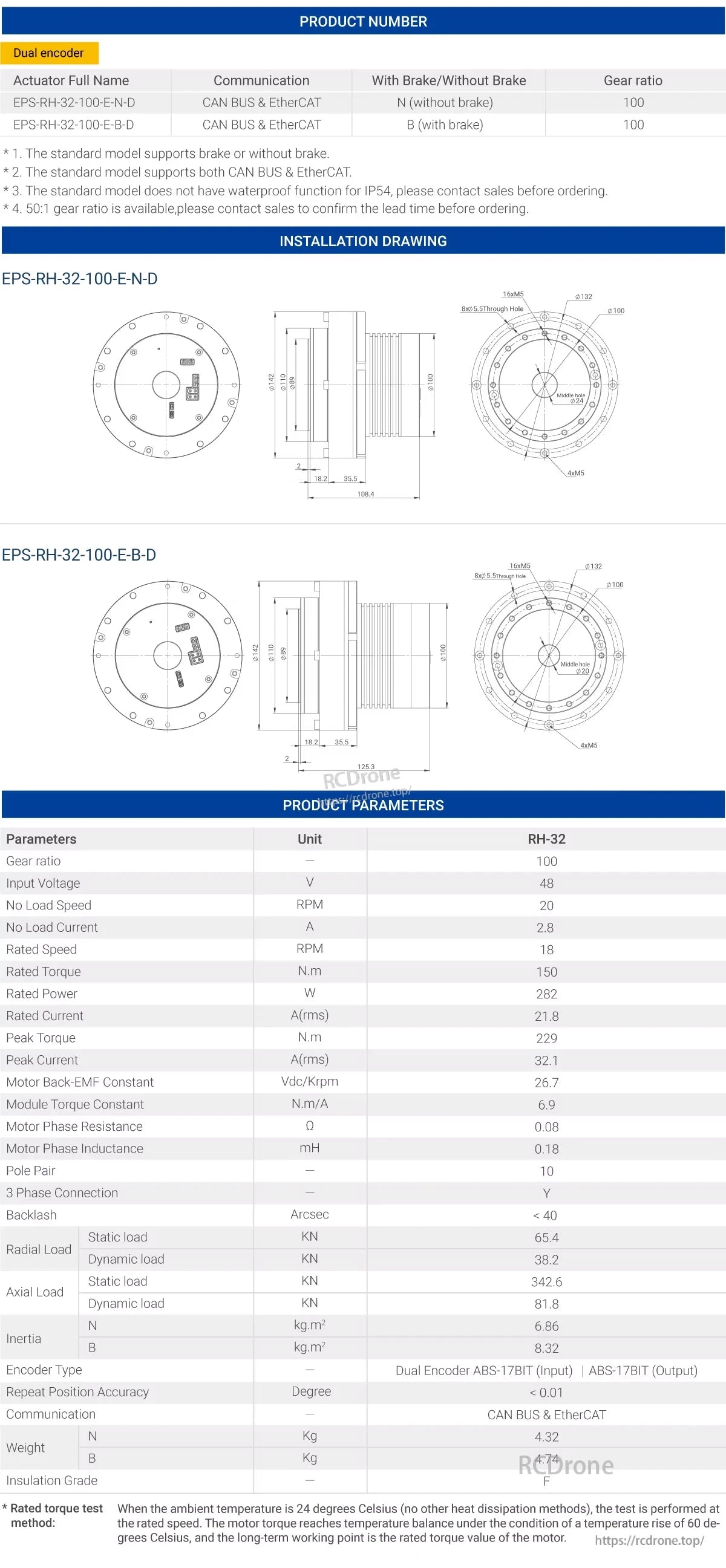
O Módulo de Junta Robótica Harmónica Oca MyActuator RH-32 é um atuador de alto torque e alta precisão, projetado para braços robóticos, robôs humanoides e sistemas de automação colaborativa. Com uma relação de transmissão de 100:1, tensão de entrada de 48V, e torque de pico de 229 N·m, o RH-32 garante um desempenho excepcional para aplicações que requerem movimento suave, controle preciso e alta capacidade de carga. Com suporte para encoders duplos (entrada/saída de 17 bits), comunicação CAN BUS & EtherCAT, e um design de eixo oco, integra-se perfeitamente em sistemas robóticos avançados.
Principais Características
-
Desempenho de Alto Torque – Fornece até 150 N·m de torque nominal e 229 N·m de torque de pico, ideal para juntas robóticas de alta resistência.
-
Controlo de Precisão – Encoders duplos de 17 bits garantem feedback preciso e repetibilidade de <0.01°.
-
Comunicação Versátil – Suporta CAN BUS e EtherCAT para integração de sistema fiável e flexível.
-
Capacidade de Carga Robusta – Suporta até 342.6 kN de carga estática axial e 81.6 kN de carga dinâmica axial.
-
Design Oco Compacto – Facilita o encaminhamento de cabos através da junta para uma configuração robótica mais limpa e segura.
-
Alta Fiabilidade – Classificado com grau de isolamento F e design avançado de dissipação de calor para durabilidade industrial.
Especificações Técnicas
| Parâmetro | Unidade | Valor |
|---|---|---|
| Relação de Transmissão | — | 100 |
| Tensão de Entrada | V | 48 |
| Velocidade sem Carga | RPM | 20 |
| Corrente sem Carga | A | 2.8 |
| Velocidade Nominal | RPM | 18 |
| Torque Nominal | N·m | 150 |
| Poder Nominal | W | 282 |
| Corrente Nominal | A(rms) | 21.8 |
| Torque Máximo | N·m | 229 |
| Corrente Máxima | A(rms) | 32.1 |
| Constante de Back-EMF do Motor | Vdc/Krpm | 26.7 |
| Constante de Torque do Módulo | N·m/A | 6.9 |
| Resistência de Fase do Motor | Ω | 0.08 |
| Indutância de Fase do Motor | mH | 0.18 |
| Par de Polos | — | 10 |
| Conexão Trifásica | — | Y |
| Folga | Arcsec | < 40 |
| Carga Radial (Estática/Dinâmica) | kN | 65.4 / 38.2 |
| Carga Axial (Estática/Dinâmica) | kN | 342.6 / 81.6 |
| Inércia (N/B) | kg·m² | 6.86 / 8.32 |
| Tipo de Encoder | — | Encoder Duplo ABS-17BIT (Entrada/Saída) |
| Precisão de Repetição de Posição | Grau | < 0.01 |
| Comunicação | — | CAN BUS & EtherCAT |
| Peso (N/B) | Kg | 4.32 / 4.74 |
| Grau de Isolamento | — | F |
Descrição da Interface
O RH-32 suporta comunicação EtherCAT e CAN, proporcionando controlo em tempo real fiável.
-
EtherCAT: Comunicação determinística de alta velocidade para automação industrial.
-
CAN BUS: Comunicação flexível e estável para sistemas complexos de múltiplas articulações.
-
Conectores dedicados para sinais de potência, feedback e controlo garantem uma integração segura e eficiente.
Informação de Embalagem
-
Dimensões da Caixa: 165mm × 165mm × 127mm
-
Acessórios Incluídos:
-
Cabo de Alimentação × 2
-
Cabo de Comunicação CAN BUS × 2
-
Cabo de Resistor de Bleed × 1
-
Cabo de Bateria Multi-volta × 1
-
Resistência de Terminal de 120Ω × 1
-
Cabo de Comunicação EtherCAT × 2
-
Módulo de Comunicação CAN BUS × 1 (com adaptador USB-CAN gratuito)
- MyActuator Módulo de Junta de Robô RH-32-100 x 1
-
Aplicações
-
Robôs colaborativos (cobots)
-
Robôs humanoides e de serviço
Manipuladores industriais
-
Veículos guiados automatizados (AGVs)
-
Sistemas de posicionamento de precisão
Detalhes
A junta do robô RH-32 oferece encoder duplo, CAN BUS/EtherCAT, relação de engrenagem de 100:1, 48V, 150 N.m torque, 21.8 Um atual. Travão opcional, IP54 disponível.
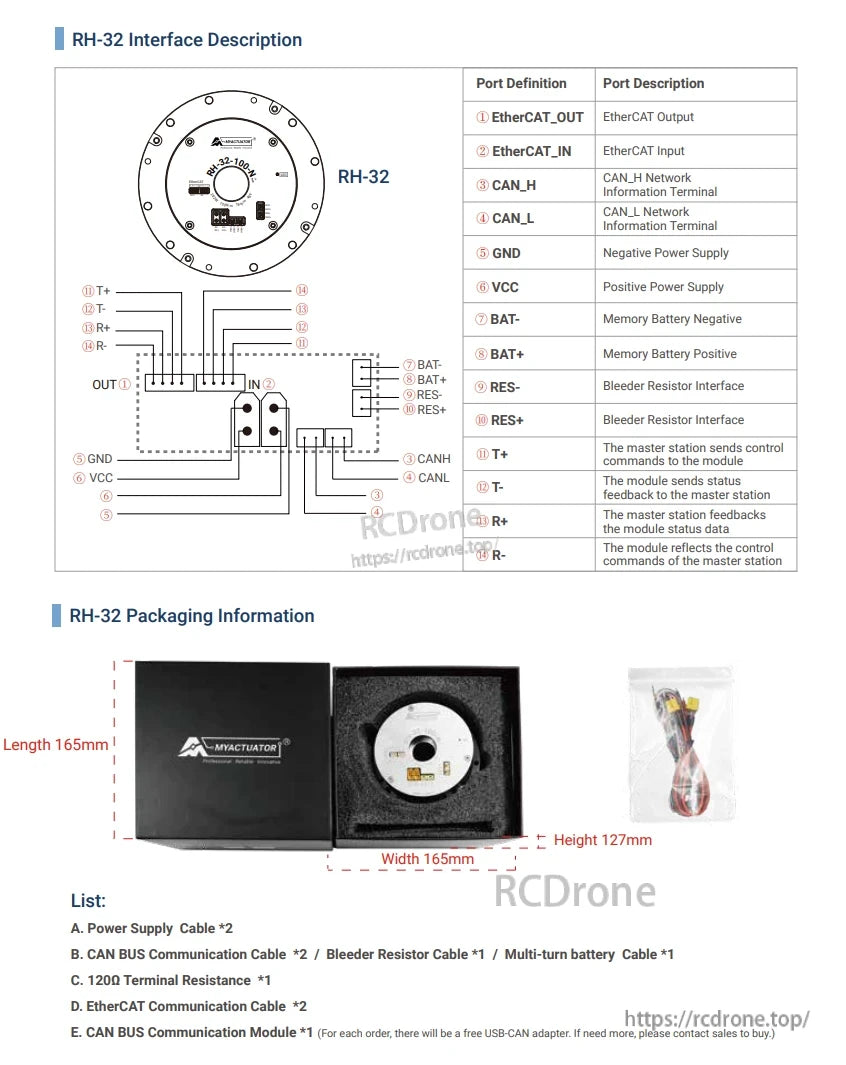
O conjunto de articulação RH-32 apresenta interfaces EtherCAT e CAN, definições de portas, dimensões 165x165x127mm. Inclui cabos, resistência terminal, módulo CAN.
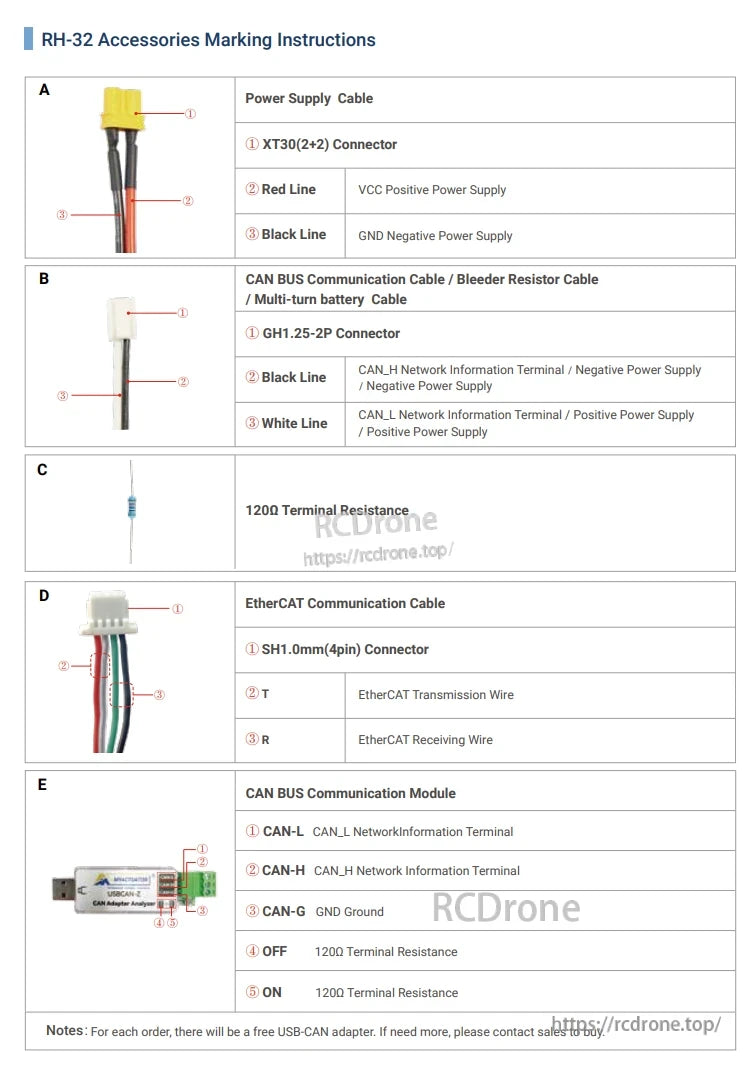
Os acessórios RH-32 incluem cabos de alimentação, CAN BUS, EtherCAT, resistor de 120Ω e módulo CAN. Os detalhes abrangem conectores, funções dos fios e resistências terminais para uma instalação e comunicação adequadas. Adaptador USB-CAN gratuito incluído com cada pedido.
Related Collections






