





Atuador Planetário Robótico MyActuator RMD-X2-7 7N·m 24V 28:1 Encoder Duplo Motor de Servo CAN EtherCAT
Atuador Planetário Robótico MyActuator RMD-X2-7 7N·m 24V 28:1 Encoder Duplo Motor de Servo CAN EtherCAT
MyActuator
Não foi possível carregar a disponibilidade de recolha
Overview
O MyActuator RMD-X2-7 atuador planetário é um motor de engrenagem servo compacto e de alta precisão, projetado para aplicações de robótica, automação e controlo de movimento. Com uma relação de engrenagem de 28.17:1, encoders duplos (entrada ABS de 17 bits / saída de 18 bits), e suporte para comunicação tanto via CAN BUS como EtherCAT, garante uma saída de torque estável e posicionamento preciso. Com um torque nominal de 2.5 N·m, torque de pico de 7 N·m, e uma velocidade nominal de 142 RPM, este atuador oferece potência fiável num formato leve de 0.26 kg.
Principais Características
-
Controlo de Alta Precisão – Sistema de encoder duplo (entrada de 17 bits, saída de 18 bits) com precisão de controlo de <0.01°.
-
Desempenho Forte – Potência nominal de 37 W, corrente nominal de 3 A, eficiência de 63%.
-
Design Compacto – Diâmetro 44 mm, comprimento 63.5 mm, peso apenas 0.26 kg.
-
Movimento Suave – Controlo orientado ao campo (FOC), baixo retrocesso (≤12 arcmin), e constante de torque de 0.8 N·m/A.
-
Durabilidade – Rolamentos de esferas de ranho profundo, grau de isolamento F, e caixa de alumínio robusta.
-
Conectividade Flexível – Compatível com CAN BUS e EtherCAT protocolos.
-
Segurança & Estabilidade – Corrente de pico 8.1 A, eficiência nominal, e resistência ao torque de paragem testada com diferentes correntes de fase.
Especificações
| Parâmetro | Valor |
|---|---|
| Relação de Transmissão | 28.17:1 |
| Tensão de Entrada | 24 V |
| Velocidade sem Carga | 178 RPM |
| Velocidade Nominal | 142 RPM |
| Torque Nominal | 2.5 N·m |
| Torque de Pico | 7 N·m |
| Potência Nominal | 37 W |
| Corrente de Fase Nominal | 3 A (rms) |
| Corrente de Fase de Pico | 8.1 A (rms) |
| Eficiência | 63% |
| Constante de Back-EMF do Motor | 4.3 Vdc/Krpm |
| Constante de Torque | 0.8 N·m/A |
| Resistência do Motor | 0.61 Ω |
| Indutância do Motor | 0.13 mH |
| Pares de Polo | 13 |
| Torque de Retorno | 0.4 N·m |
| Folga | ≤12 arcmin |
| Tipo de Rolamento | Rolamentos de Esferas de Canal Profundo |
| Carga Axial | 0.25 KN |
| Carga Radial | 1 KN |
| Inércia | 0.17 Kg·cm² |
| Tipo de Encoder | Encoder Duplo ABS-17bit(Entrada)/18bit(Saída) |
| Comunicação | CAN BUS / EtherCAT |
| Peso | 0.26 kg |
| Classe de Isolamento | F |
Dados de Torque de Estacionamento
| Torque (N·m) | Aumento de Temperatura (°C) | Tempo de Estacionamento (s) | Corrente de Fase (A rms) |
|---|---|---|---|
| 3.75 | 20 | 15 | 4.3 |
| 5.0 | 48 | 10 | 5.7 |
| 6.25 | 31 | 8 | 7.4 |
| 7.5 | 59 | 5 | 8.6 |
Acessórios (Incluídos)
-
Fonte de Alimentação + Cabo de Comunicação CAN BUS ×1
-
Resistência Terminal de 120Ω ×1
-
Cabo de Comunicação EtherCAT ×2
-
Módulo de Comunicação CAN BUS (Adaptador USB-CAN) ×1
Aplicações
O MyActuator RMD-X2-7 é ideal para braços robóticos, robôs humanoides, exoesqueletos, gimbals e sistemas de automação industrial onde são necessários controlo de torque preciso, tamanho compacto e comunicação de canal duplo.
Detalhes

Motor servo sem escovas X2-7, entrada de encoder duplo ABS-17BIT/saída 18BIT, 37W, 2.5N.m, 142rpm, bus CAN, 128, indicador LED.

Atuador Planetário RMD X2-7 com encoder duplo EtherCAT+CAN BUS. Apresenta 28.Relação de engrenagem de 17, entrada de 24V, velocidade de 142RPM, torque de 2.5N.m e potência de 37W. Inclui dimensões de instalação e especificações técnicas.

O RMD-X2-P28-7 oferece encoder duplo, entrada de 24V, torque de 2.5N.m, 142 RPM, CAN BUS/EtherCAT e peso de 0.26kg. Inclui desenho de instalação e especificações detalhadas como torque de paragem e dados elétricos.

A interface X2-7 inclui VCC, GND, CAN_H, CAN_L, EtherCAT IN/OUT e portas T+/T-, R+/R-. Embalagem: caixa de 65x65x55mm com fonte de alimentação, cabo CAN, resistor de 120Ω, cabo EtherCAT e dois módulos CAN. Adaptador USB-CAN gratuito incluído por encomenda.
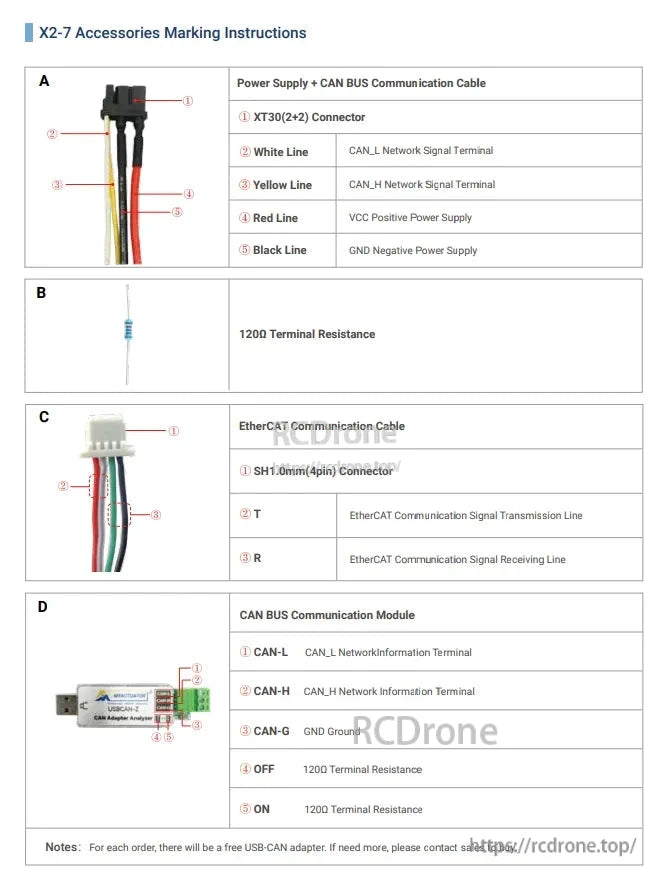
As instruções de marcação detalham a fonte de alimentação, cabos CAN BUS, cabos EtherCAT, conectores e resistência terminal. Inclui nota sobre o adaptador USB-CAN para encomendas.

O motor servo MYACTUATOR X2-7 fornece 37W de potência e 2.5N.m de torque, com encoder duplo, velocidade de 1.42rpm e relação de engrenagem de 1:28.Inclui uma fonte de alimentação, cabo de comunicação CAN BUS, resistência de terminação, cabos EtherCAT e um módulo CAN. Um adaptador USB-CAN gratuito está incluído. Etiquetados como VCC, GND, CANH, CANL e sinal I/O, garantem uma configuração fácil. Certificado CE e RoHS, oferece desempenho profissional, fiável e inovador.
Related Collections





